超越YOLOv4的目标检测算法-PP-YOLO

PP-YOLO的实验评估指标比现有最先进的对象检测模型YOLOv4表现出更好的性能,然而,本文并不打算介绍一种新型的目标检测器,而更像是一个食谱,告诉你如何逐步建立一个更好的探测器。
让我们一起看看。
YOLO发展史
YOLO最初是由Joseph Redmon提出,是用于检测目标的算法。目标检测是一种计算机视觉技术,它通过在目标周围画一个边界框来定位和标记对象,并确定一个给定的框所属的类标签。YOLO和大型NLP transformers不同,它设计得很小,可为设备上的部署提供实时推理速度。
YOLO-9000是Joseph Redmon提出的第二个“YOLOv2”目标探测器,它改进了探测器,并强调了该检测器能够推广到世界上任何物体的能力。
YOLOv3对检测网络做了进一步的改进,并开始将目标检测过程纳入主流。我们现在也在发布关于如何在PyTorch中训练YOLOv3、如何在Keras中训练YOLOv3的教程,并将YOLOv3的性能与EfficientDet(另一种最先进的检测器)进行比较。
然后约瑟夫·雷德曼出于伦理考虑退出了目标探测的研究。
当然,开源社区接过了指挥棒,继续推动YOLO技术的发展。
YOLOv4由Alexey AB在他的YOLO Darknet存储库中发表。YOLOv4主要是其他已知计算机视觉技术的集合,通过研究过程进行了组合和验证。请看这里来深入了解YOLOv4。
https://blog.roboflow.ai/a-thorough-breakdown-of-yolov4/
如下所示,我们也提供了一些关于如何在Darknet中训练YOLOv4的很好的训练教程。
https://blog.roboflow.ai/training-yolov4-on-a-custom-dataset/
YOLOv5采用了Darknet(基于C)的训练环境,并将网络转换为Pytorch。改进的训练技术进一步提高了模型的性能,并创建了一个非常好用的开箱即用的对象检测模型。从那以后,我们一直鼓励使用Roboflow的开发人员通过这个YOLOv5训练教程将他们的注意力转向YOLOv5,以形成他们的自定义对象检测器。
PP代表什么?
PP是百度编写的深度学习框架PaddlePaddle的缩写。

如果你不熟悉Paddle,那我们就在同一条船上了。paddle最初是用Python编写的,它看起来类似于PyTorch和TensorFlow。深入研究paddle框架是很有趣,但这超出了本文的范围。
PP-YOLO贡献
PP-YOLO的论文读起来很像YOLOv4论文,因为它是计算机视觉中已知的技术的汇总。新颖的贡献是证明这些技术的集成可提高性能,并提供消融研究,以研究每一步对模型的帮助程度。
在我们深入研究PP-YOLO的贡献之前,先回顾一下YOLO检测器的体系结构。
解剖YOLO检测器

YOLO检测器分为三个主要部分。
YOLO Backbone:YOLO Backbone(骨干)是一个卷积神经网络,它将图像像素合并在一起以形成不同粒度的特征。骨干网络通常在分类数据集(通常为ImageNet)上进行预训练。
YOLO Neck:YOLO Neck(上面选择了FPN)在传递到预测头之前对ConvNet图层表示进行组合和混合。
YOLO Head:这是网络中进行边界框和类预测的部分。它由关于类,框和对象的三个YOLO损失函数进行训练。
现在,让我们深入了解PP YOLO做出的贡献。

更换骨干网
第一种PP YOLO技术是用Resnet50-vd-dcn ConvNet骨干替换YOLOv3 Darknet53骨干。Resnet是一个更流行的骨干,它的执行优化了更多的框架,并且其参数少于Darknet53。通过交换此骨干可以看到mAP的改进,这对PP YOLO来说是一个巨大的胜利。
模型参数的EMA
PP-YOLO跟踪网络参数的指数移动平均,以保持模型权重的阴影预测时间。这已经被证明可以提高推理的准确性。
更大的批量
PP-YOLO将批量大小从64增加到192,当然如果有GPU内存限制,这是很难实现。
DropBlock正则化
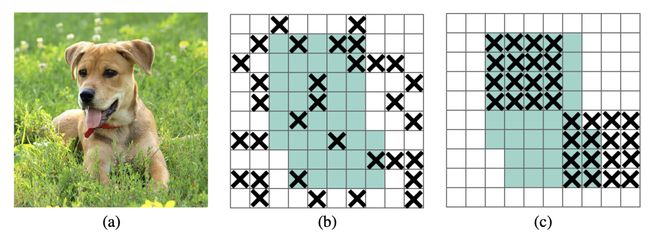
PP-YOLO在FPN颈部实现DropBlock正则化(在过去,这通常发生在骨干)。在网络的给定步骤中,DropBlock会随机删除一部分训练特征,以指示模型不依赖于关键特征进行检测。
IOU损失
YOLO损失函数不能很好地转换为mAP指标,该指标在计算中大量使用了Union上的Interp,因此在考虑到最终预测的情况下修改训练损失函数是很有用的。这个修改措施也用在YOLOv4中。
IoU Aware
PP-YOLO网络添加了一个预测分支,以预测给定对象的模型估计的IOU。在决定是否预测对象时包含此IoU Aware可提高性能。
电网灵敏度
旧的YOLO模型不能很好地在锚框区域的边界附近进行预测,为了避免这个问题,可以稍微修改框坐标的定义。YOLOv4中也有这种技术。
矩阵非最大抑制
非最大抑制是一种删除冗余的候选对象来进行分类的技术。矩阵非最大抑制是一种并行排序这些候选预测的技术,它加快了计算速度。
CoordConv
CoordConv受ConvNets中一个问题的启发,即ConvNets仅将(x,y)坐标映射到一个热像素空间。CoordConv解决方案是使卷积网络可以访问其自己的输入坐标。CoordConv干预措施上方标有黄色菱形。有关更多详细信息,请参见CordConv文件。
https://arxiv.org/pdf/1807.03247.pdf
SPP
空间金字塔池化是骨干层之后的一个额外块,用于混合和合并空间特征,这还在YOLOv4和YOLOv5中实现。
更好的预训练骨干
PP YOLO的作者提炼出更大的ResNet模型作为骨干。更好的预训练模型也可以改善下游的转移学习。
PP-YOLO是最先进的吗?
PP-YOLO优于2020年4月23日发布的YOLOv4结果。
YOLOv4:https://arxiv.org/pdf/2004.10934.pdf
作者的意图似乎不只是“引入一种新颖的新型检测器”,而是表明仔细调整对象检测器以最大化性能的过程。在此处引用作者的文章介绍:
本文的重点是如何堆叠一些几乎不影响效率的有效技巧以获得更好的性能,本文无意介绍一种新颖的目标检测器,它更像一个食谱,它告诉你如何逐步构建更好的检测器。我们发现了一些对YOLOv3检测器有效的技巧,可以节省开发人员的反复试验时间。最终的PP-YOLO模型以比YOLOv4更快的速度将COCO的mAP从43.5%提高到45.2%
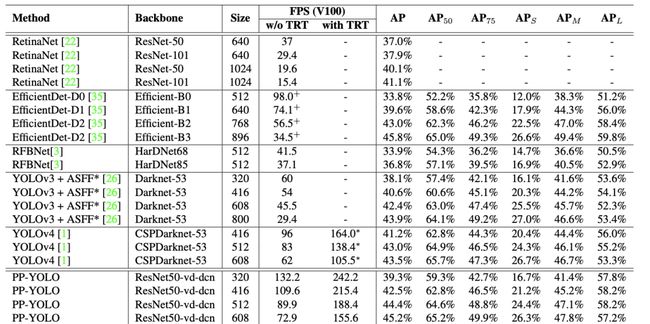
PP-YOLO将YOLOv3模型在COCO对象检测任务上从38.9 mAP提升到44.6 mAP,并将推理FPS从58增加到73。文章中说明了这些指标,优于YOLOv4和EfficientDet的当前发布结果。
在以YOLOv5为基准对PP-YOLO进行基准测试时,YOLOv5似乎仍在V100上具有最快的推理精度(AP与FPS),但是,YOLOv5论文仍然有待发布,此外研究表明,在YOLOv5 Ultralytics存储库上训练YOLOv4体系结构的性能要优于YOLOv5,并且以可移植的方式,使用YOLOv5进行训练的YOLOv4的性能将优于此处发布的PP-YOLO结果。这些结果仍有待正式发布,但可以追溯到GitHub上的讨论。
https://github.com/ultralytics/yolov5/issues/6

值得注意的是,在YOLOv4中使用的许多技术(如架构搜索和数据扩充)并没有在ppyolo中使用,这意味着,随着更多这些技术的结合和集成,目标检测的最新技术仍有发展的空间。
毋庸置疑,这是实施计算机视觉技术令人激动人心的时刻。
我应该从YOLOv4或YOLOv5切换到PP-YOLO吗?
PP-YOLO模型显示了最先进的目标检测的前景,但与其他对象检测器相比,改进是渐进的,它是在一个新的框架中进行编写的。在这个阶段中,最好的做法是通过在自己的数据集上训练PP-YOLO来提高自己的实验效果。
同时,我建议你查看以下YOLO教程,让你的对象探测器成为现实:
如何在Darknet中训练YOLOv4
-
https://blog.roboflow.ai/training-yolov4-on-a-custom-dataset/
如何在PyTorch中训练YOLOv5
-
https://blog.roboflow.ai/how-to-train-yolov5-on-a-custom-dataset/
参考链接:https://towardsdatascience.com/pp-yolo-surpasses-yolov4-object-
☆ END ☆
如果看到这里,说明你喜欢这篇文章,请转发、点赞。微信搜索「uncle_pn」,欢迎添加小编微信「 mthler」,每日朋友圈更新一篇高质量博文。
↓扫描二维码添加小编↓
