Patchwork++:基于点云的快速、稳健的地面分割方法
文章:Patchwork++: Fast and Robust Ground Segmentation Solving Partial Under-Segmentation Using 3D Point Cloud
作者:Seungjae Lee1, Hyungtae Lim1,and Hyun Myung1
编译:点云PCL
代码:https://github.com/url-kaist/patchwork-plusplus.git
本文仅做学术分享,如有侵权,请联系删除。欢迎各位加入免费知识星球,获取PDF论文,欢迎转发朋友圈。内容如有错误欢迎评论留言,未经作者允许请勿转载,欢迎各位同学积极分享和交流。
公众号致力于分享点云处理,SLAM,三维视觉,高精地图相关的文章与技术,欢迎各位加入我们,一起每交流一起进步,有兴趣的可联系微信:920177957。本文来自点云PCL博主的分享,未经作者允许请勿转载,欢迎各位同学积极分享和交流。
摘要
在使用3D激光雷达传感器的感知领域中,地面分割是用于各种感知的基本任务,例如可行驶区域检测和对象识别,在这种情况下,研究者们提出了几种地面分割方法,然而仍然有一些限制。首先,一些地面分割方法需要根据环境对参数进行微调,这非常费时费力,此外,即使参数调整得当,仍可能出现部分分段不足问题,这意味着某些区域的地面分割失败,最后当地面位于另一结构物上方时,地面分割方法通常无法估计适当的地平面。为了解决这些问题,本文提出了一种鲁棒的地面分割方法,称为Patchwork++,这是Patchwork的扩展。Patchwork++利用自适应地面似然估计(A-GLE)基于先前的地面分割结果自适应地计算适当的参数,此外,时间地面恢复(TGR)利用地面特性缓解了部分欠分割问题,此外,引入了区域垂直平面拟合(RVPF),以正确分割接地平面,即使地面被不同层抬高。最后提出了基于三维激光雷达反射模型的反射噪声去除(RNR)方法,以有效消除虚拟噪声点,使用SemanticKITTI数据集演示了定性和定量评估。代码开源:https://github.com/url-kaist/patchwork-plusplus
主要贡献
当地面分割被用作预处理步骤时,它应该满足以下三个要求,首先,地面分割应该足够快以便用作其他算法(如对象聚类)的初步过程,其次,它应该确保性能扰动很小,以同时保证精度和召回性能,第三,它应该能够处理不均匀的室外环境。然而,一些地面分割方法是无法满足这些要求,甚至出现欠分段问题,如图1(b)所示。

图1.我们提出的方法和地面分割的一般问题的描述。(a) 在城市环境中,地面可能不是平坦的,因此(b)使用单个平面模型进行地面分割有时会导致大量假阴性,称为欠分割(c) 之前的工作Patchwork处理分段不足的问题,但有时会部分失败,这是因为其参数是确定性的,因此,这些用户定义的参数可能会过滤掉一些地面部分。(d) 与 Patchwork不同, Patchwork++基于先前的地面分割更新其参数,因此,Patchwork++在不平坦的环境中成功地执行了地面分割。红色、绿色和蓝色轴分别表示x、y和z坐标。
尽管之前的工作Patchwork满足这些要求,但它偶尔会出现部分分段不足问题,如图1(c)所示。这些细分不足的问题通常是由于两个潜在原因造成的。首先,一些地面分割方法是确定性的,其次,在某些情况下,具有低z值的点最有可能被视为接地点的假设不成立。因此,Patchwork++是Patchwork的高级版本旨在解决这些问题,因此,提出的方法在复杂的城市环境中更加通用。我们的贡献有以下三方面:
首先,提出了自适应地面似然估计(A-GLE)和空间地面恢复(TGR),与基于从粗到精策略的 Patchwork相比,该方法提供的假阴性更少,解决了部分欠分割问题。
其次,提出了两种新的异常值抑制模块,即反射噪声去除(RNR)和区域垂直平面拟合(R-VPF),以防止我们的假设因抑制噪声或非接地点而不成立的情况。
第三,提出的算法用SemanticKITTI数据集进行了评估,实验证据证实,与包括 Patchwork在内的最先进方法相比, Patchwork++表现出了良好的性能,并显示出最快的速度。
主要内容
这里介绍了Patchwork++每个模块背后的问题定义和基本原理,与Patchwork不同,提出了以下四个部分:RNR、RVPF、A-GLE和TGR,如图2所示
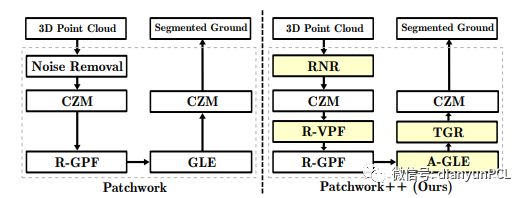
图2.(L-R)Patchwork和Patchworks++的流程图。与Patchwork不同,Patchwork++由称为反射噪声去除(RNR)、区域垂直平面拟合(R-VPF)、自适应GLE(A-GLE)和空间地面恢复(TGR)的新模块组成。CZM和R-GPF分别代表先前工作Patchwork中提出的同心区模型和区域接地平面拟合
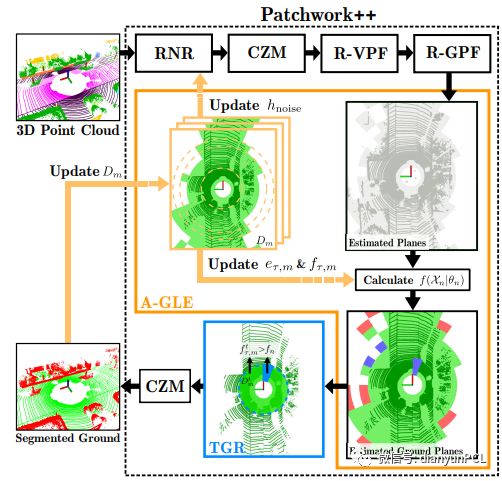
图3 各个模块参数更新示意图
实验
与现有技术方法的比较:图8总结了我们提出的方法和其他地面分割方法的总体性能,与其他地面分割法相比,我们提出的算法显示出最高的F1分数,其中包括RANSAC、LineFit、GPF、RGPF和CascadedSeg;我们提出的方法解决了先前噪声滤波方法的固有问题(图8(a)和(c))因此,与Patchwork相比,Patchwork++具有更高的精确度和召回率。此外,新的Patchwork++具有较低的召回标准差。这些实验证据证实了我们提出的方法有助于在复杂的城市环境中进行准确和鲁棒的地面分割
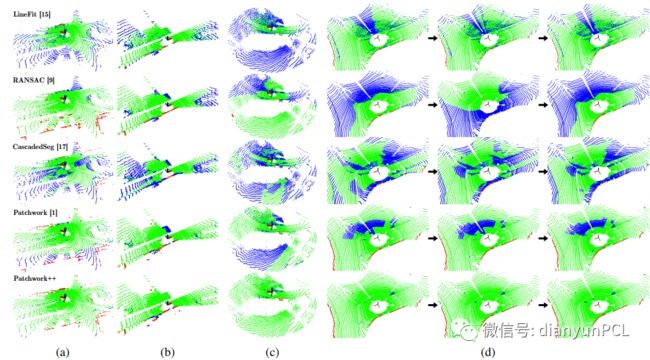
图8.提出的方法Patchwork++和最新方法之间的定性比较
与现有技术的精确度,召回率和F1对比如下表:

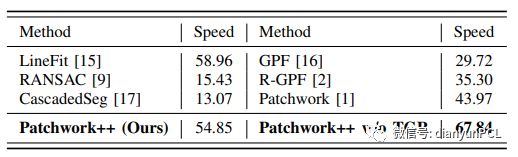
运行效率对如下表:
总结
在本研究中,提出了一种快速、鲁棒的地面分割方法Patchwork++。经验证该方法比其他最先进的方法更快、更稳健,此外,Patchwork++减少了需要根据环境进行微调的参数数量,因此,在实践中使用地面分割变得更加容易。未来,我们计划将Patchwork++应用于各种应用,包括激光雷达里程计、物体识别和静态地图构建。
资源
三维点云论文及相关应用分享
【点云论文速读】基于激光雷达的里程计及3D点云地图中的定位方法
3D目标检测:MV3D-Net
三维点云分割综述(上)
3D-MiniNet: 从点云中学习2D表示以实现快速有效的3D LIDAR语义分割(2020)
win下使用QT添加VTK插件实现点云可视化GUI
JSNet:3D点云的联合实例和语义分割
大场景三维点云的语义分割综述
PCL中outofcore模块---基于核外八叉树的大规模点云的显示
基于局部凹凸性进行目标分割
基于三维卷积神经网络的点云标记
点云的超体素(SuperVoxel)
基于超点图的大规模点云分割
更多文章可查看:点云学习历史文章大汇总
SLAM及AR相关分享
【开源方案共享】ORB-SLAM3开源啦!
【论文速读】AVP-SLAM:自动泊车系统中的语义SLAM
【点云论文速读】StructSLAM:结构化线特征SLAM
SLAM和AR综述
常用的3D深度相机
AR设备单目视觉惯导SLAM算法综述与评价
SLAM综述(4)激光与视觉融合SLAM
Kimera实时重建的语义SLAM系统
SLAM综述(3)-视觉与惯导,视觉与深度学习SLAM
易扩展的SLAM框架-OpenVSLAM
高翔:非结构化道路激光SLAM中的挑战
SLAM综述之Lidar SLAM
基于鱼眼相机的SLAM方法介绍
如果你对本文感兴趣,请后台发送“知识星球”获取二维码,务必按照“姓名+学校/公司+研究方向”备注加入免费知识星球,免费下载pdf文档,和更多热爱分享的小伙伴一起交流吧!
以上内容如有错误请留言评论,欢迎指正交流。如有侵权,请联系删除
扫描二维码
关注我们
让我们一起分享一起学习吧!期待有想法,乐于分享的小伙伴加入免费星球注入爱分享的新鲜活力。分享的主题包含但不限于三维视觉,点云,高精地图,自动驾驶,以及机器人等相关的领域。
分享及合作方式:微信“920177957”(需要按要求备注) 联系邮箱:[email protected],欢迎企业来联系公众号展开合作。
点一下“在看”你会更好看耶