2021李宏毅机器学习笔记--23 Theory behind GAN
2021李宏毅机器学习笔记--23 Theory behind GAN
- 摘要
- 一、Maximum Likelihood Estimation(最大似然估计)
- 二、MLE=Minimize KL Divergence(最小KL散度)
- 三、Generator
- 四、Discriminator
- 五、D*和divergence的关系证明
- 六、知识回顾:KL散度、JS散度和交叉熵
- 七、G*的目标
- 八、GD Algorithm for GAN
- 九、In practice(实做中)
- 十、Algorithm for GAN
- 总结
摘要
本章节主要介绍GAN理论后的数学原理,GAN可以根据很多的example来生成新的东西,但其实它生成的东西里面,可能只有一个固定的区域里sample出来的是我们想要的,而现在GAN的工作就是找到这个区域distribution。在GAN之前主要使用Maximum Likelihood Estimation(最大似然估计),假如说我们的数据集的分布是 P d a t a ( x ) P_{data}(x) Pdata(x),我们定义一个分布 P G ( x ; θ ) P_G(x;\theta) PG(x;θ),我们想要找到一组参数 θ,使得 P G ( x ; θ ) P_G(x;\theta) PG(x;θ)越接近 P d a t a ( x ) P_{data}(x) Pdata(x)越好。Minimize KL Divergence其实最大似然估计的另一种解释,它只不过是在MLE的函式基础上加了一项然后重新整理得到的。但问题是采用高斯混合模型定义 P G P_G PG,生成的图片会非常模糊。所以就有了Generator的方法,它是从一个简单的分布(比如正态分布)中sample出样本,然后扔进一个network(即generator),然后得到输出,把这些输出统统集合起来,我们会得到一个与目标十分接近的distribution。我们可以从 P G P_G PG与 P d a t a P_{data} Pdata中sample出一些样本出来,那么问题就变成了从sample的数据来求 P G P_G PG与 P d a t a P_{data} Pdata,怎么求呢,可以使用Discriminator(生成器)来衡量二者之间的的Divergence散度。而生成器训练的目标是找到一个 G ∗ G^* G∗,去最小化 P G P_G PG与 P d a t a P_{data} Pdata的差异。
一、Maximum Likelihood Estimation(最大似然估计)
首先考虑一下,GAN到底生成的是什么呢?比如说,假如我们想要生成一些人脸图,实际上,我们是想找到一个分布,从这个分部内sample出来的图片,像是人脸,而不属于这个distribution(分布)的,生成的就不是人脸。而GAN要做的就是找到这个distribution。

在GAN出生之前,我们怎么做这个事情呢?
之前用的是Maximum Likelihood Estimation,最大似然估计来做生成的,我们先看一下最大似然估计做的事情。
最大似然估计的理念是,假如说我们的数据集的分布是 P d a t a ( x ) P_{data}(x) Pdata(x),我们定义一个分布 P G ( x ; θ ) P_G(x;\theta) PG(x;θ),我们想要找到一组参数 θ,使得 P G ( x ; θ ) P_G(x;\theta) PG(x;θ)越接近 P d a t a ( x ) P_{data}(x) Pdata(x)越好。比如说,加入 P G ( x ; θ ) P_G(x;\theta) PG(x;θ)如果是一个高斯混合模型,那么 θ 就是均值和方差。

具体的操作步骤如下:
- 首先我们不知道真实的数据分布是什么样的,但是我们可以从 P d a t a ( x ) P_{data}(x) Pdata(x)抽样出一些样本(真实图片)
- 对每一个sample出来的x, 我们都可以计算它的likelihood,也就是给定一组参数θ ,我们就能够知道 P G ( x ; θ ) P_G(x;\theta) PG(x;θ)长什么样,然后我们就可以计算出在这个分布里面sample出某一个x的几率。
- 我们把在某个分布可以产生 x i x_i xi 的likelihood乘起来,可以得到总的likelihood: L = ∏ i = 1 m P G ( x i ; θ ) L = \prod_{i=1}^m P_G(x^i;\theta) L=∏i=1mPG(xi;θ),我们要找到一组 θ ∗ θ^* θ∗,可以最大化L
二、MLE=Minimize KL Divergence(最小KL散度)
其实最大似然估计的另一种解释是Minimize KL Divergence

前面我们已经解释过,我们要找到一组 θ ∗ θ^* θ∗ ,使得 θ ∗ = a r g max θ ∏ i = 1 m P G ( x i , θ ) θ^*=arg\max\limits_{\theta}\prod_{i=1}^mP_G(x_i,\theta) θ∗=argθmax∏i=1mPG(xi,θ),我们对其做一些变换, 加一个Log,再把Log乘进去:
θ ∗ = a r g max θ ∏ i = 1 m P G ( x i , θ ) θ^*=arg\max\limits_{\theta}\prod_{i=1}^mP_G(x_i,\theta) θ∗=argθmax∏i=1mPG(xi,θ) = a r g log max θ ∏ i = 1 m P G ( x i , θ ) arg\log\max\limits_{\theta}\prod_{i=1}^mP_G(x_i,\theta) arglogθmax∏i=1mPG(xi,θ) =
a r g max θ ∑ i = 1 m l o g P G ( x i , θ ) arg\max\limits_{\theta}\sum_{i=1}^mlogP_G(x_i,\theta) argθmax∑i=1mlogPG(xi,θ)
其中, ∑ i = 1 m \sum_{i=1}^m ∑i=1m就相当于我从 P d a t a ( x ) P_{data}(x) Pdata(x)中sample出m个样本出来。
这个事情就相当于求从 P d a t a ( x ) P_{data}(x) Pdata(x)采样出x xx的期望:
≈ a r g max θ E x ∼ P d a t a [ l o g P G ( x ; θ ) ] arg\max\limits_{\theta}E_{x\sim P_{data}}[logP_G(x;\theta)] argθmaxEx∼Pdata[logPG(x;θ)]
接下来我们把 E x ∼ P d a t a E_{x\sim P_{data}} Ex∼Pdata这一项展开,做一个积分,得到:
= a r g max θ ∫ x P d a t a l o g P G ( x , θ ) d x = arg\max\limits_{\theta}\int_xP_{data}logP_G(x,\theta)dx =argθmax∫xPdatalogPG(x,θ)dx
接下来我们在上个式子的基础上加一项和 θ \thetaθ 无关的项,不影响求最大值:
= a r g max θ ∫ x P d a t a l o g P G ( x , θ ) d x = arg\max\limits_{\theta}\int_xP_{data}logP_G(x,\theta)dx =argθmax∫xPdatalogPG(x,θ)dx - ∫ x P d a t a l o g P G ( x , θ ) d x \int_xP_{data}logP_G(x,\theta)dx ∫xPdatalogPG(x,θ)dx
为什么要加上这一项看上去没用的项呢?因为加上这一项后,会发现把 i n t x P d a t a int_xP_{data} intxPdata提取出来,就是一个 P d a t a P_{data} Pdata和 P G P_G PG 的KL divergence,这里把两个分布位置换一下,就变成求最小值。数学上KL divergence使用来衡量两个分布的差异程度的,那么现在我们的目标就是找一组 θ来最小化 P d a t a P_{data} Pdata和 P G P_G PG的KL divegence:= a r g max θ K L ( P d a t a ∣ ∣ P G ) arg\max\limits_{\theta}KL(P_{data}||P_G) argθmaxKL(Pdata∣∣PG)
但是我们常常要先假定一个具体的分布去逼近实际分布,我们的分布 P G P_G PG不一定是高斯分布,如果 P G P_G PG是一个NN,就没有办法算likelihood。因此我们需要一个通用的分布,去逼近这个复杂的图像真实分布。因此要用GAN的Generator来解决这个问题。
三、Generator
过去如果使用最大似然估计,采用高斯混合模型定义 P G P_G PG,生成的图片会非常模糊。而现在我们用的Generator的方法,是从一个简单的分布(比如正态分布)中sample出样本,然后扔进一个network(即generator),然后得到输出,把这些输出统统集合起来,我们会得到一个distribution, 这个distribution就是我们要找的 P G P_G PG ,而我们的目标是使得 P G P_G PG$$越接近越好。

优化目标是最小化 P d a t a P_{data} Pdata之间的差异:
G ∗ = a r g max G D i v ( P G , P d a t a ) ) G ^∗ = arg\max\limits_GDiv(P_G,P_{data}) ) G∗=argGmaxDiv(PG,Pdata))
四、Discriminator
虽然我们不知道 P G P_G PG 与 P d a t a P_{data} Pdata的公式,但是我们可以从这两个分布中sample出一些样本出来。对于 P d a t a P_{data} Pdata来说,我们从给定的数据集中sample出一些样本就可以了。对于 P G P_G PG来说,我们随机sample一些向量,扔到Generator里面,然后generator会输出一些图片,这就是从 P G P_G PG里面sample了。

问题就变成我们怎么从sample的数据求 P G P_G PG与 P d a t a P_{data} Pdata
其实我们可以使用Discriminator来衡量 P G P_G PG与 P d a t a P_{data} Pdata的Divergence
蓝色星星: data sampled from P d a t a P_{data} Pdata
橙色星星: data sampled from P G P_G PG
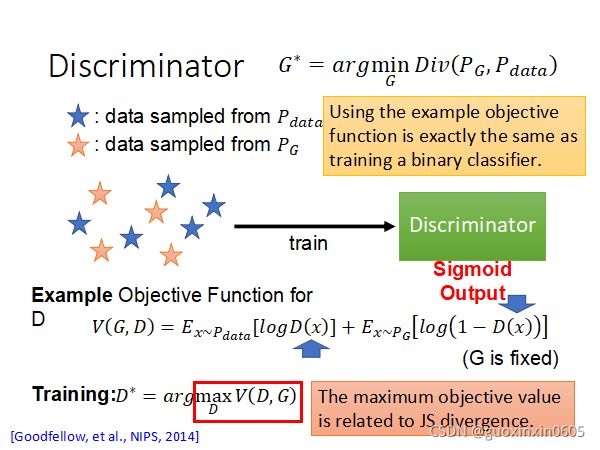
我们可以用Discriminator来区分两个Distribution,公式:
V ( G , D ) = E x ∼ P d a t a [ l o g D ( x ) ] + E x ∼ P G [ l o g ( 1 − D ( x ) ) ] V(G,D)=E_{x∼P_data}[logD(x)]+ E_{x∼P_G}[log(1−D(x))] V(G,D)=Ex∼Pdata[logD(x)]+Ex∼PG[log(1−D(x))]
前面一项是表示数据sampled from P d a t a P_{data} Pdata,值越大越好,后面一项是表示数据sampled from P G P_G PG,值越小越好
上面公式的形式和训练一个二分类Classifier的目标函数长得一样,就是说可以把 P G P_G PG与 P d a t a P_{data} Pdata看成两个分类。
训练Discriminator就好比训练一个二分类:
D ∗ = a r g max D V ( D , G ) D^∗=arg\max\limits_DV(D,G) D∗=argDmaxV(D,G)
而训练出来的 max D V ( D , G ) \max\limits_DV(D,G) DmaxV(D,G)就相当于与JS divergence,来看下为什么是JS divergence。
如果两个分布的数据很接近(small divergence),那么Discriminator很难把数据分开,也就是上面的公式很难找到一个D,使得 D ∗ D^* D∗取得很大的值。那么就找到最大的divergence,使得两个分布的数据相隔ed远一些,我们的Discriminator就能容易的将数据分开。

也就是 D ∗ D^* D∗和divergence程度有关系,下面用数学来证明。
五、D*和divergence的关系证明

给定Generator, 我们要找到能最大化目标函数 V ( D , G ) V(D,G) V(D,G) 的 D ∗ D^* D∗ :
V = E x ∼ P d a t a [ l o g D ( x ) ] + E x ∼ P G [ l o g ( 1 − D ( x ) ) ] V=E_{x∼P_data}[logD(x)] + E_{x∼P_G}[log(1−D(x))] V=Ex∼Pdata[logD(x)]+Ex∼PG[log(1−D(x))]
= ∫ x P d a t a l o g D ( x ) d x + ∫ x P G ( x ) l o g ( 1 − D ( x ) ) \int_xP_{data}logD(x)dx + \int_xP_G(x)log(1-D(x)) ∫xPdatalogD(x)dx+∫xPG(x)log(1−D(x))
= ∫ x [ P d a t a ( x ) l o g D ( x ) + P G ( x ) l o g ( 1 − D ( x ) ) ] d x \int_x[P_{data}(x)logD(x) + P_G(x)log(1-D(x))]dx ∫x[Pdata(x)logD(x)+PG(x)log(1−D(x))]dx
上面等同于,我们将某一个X拿出来,我们可以让之前积分内部的式子越大越好;其实就是所有的X就是分开来算;
P d a t a ( x ) l o g D ( x ) + P G l o g ( 1 − D ( x ) ) P_{data}(x)logD(x)+P_Glog(1−D(x)) Pdata(x)logD(x)+PGlog(1−D(x))

我们想要找到一组参数 D ∗ D^* D∗ ,让这一项最大。我们把这个式子简写一下,将$ P_{data} 用 a 表 示 , 用a表示, 用a表示,P_G$用b表示,那么上式可写为:
f ( D ) = a l o g D + b l o g ( 1 − D ) f(D)=alogD+blog(1−D) f(D)=alogD+blog(1−D)
接下来对其求导,并让其等于=0,即求梯度,有:
d f ( D d D = a ∗ 1 D + b ∗ 1 1 − D ∗ ( − 1 ) \frac{df(D}{dD}=a*\frac1D+b*\frac1{1-D}*(-1) dDdf(D=a∗D1+b∗1−D1∗(−1)
最终求解得到 D ∗ D^* D∗ :
D ∗ = a a + b = P d a t a ( x ) P d a t a ( x ) + P G ( x ) D^∗= \frac{a}{a+b}=\frac{P_{data(x)}}{P_{data}(x)+P_G(x)} D∗=a+ba=Pdata(x)+PG(x)Pdata(x)
我们求出了这个D,把它代到 V ( G , D ∗ ) V(G,D^*) V(G,D∗) 里面,然后将分子分母同时除以2,然后提出来(这一步是为了之后方便化简),之后可以将其化简成Jensen-Shannon divergence(某一种计算分部差异的公式)的形式:


通过这一系列的化简,我们可以知道,最大化 V ( G , D ∗ ) V(G,D^*) V(G,D∗),其实就是求解分布 P G , P d a t a P G ,P_{data} PG,Pdata的JS divergence。所以当去训练一个distriminator,就是通过 P G , P d a t a , P_G, P_{data}, PG,Pdata,sample出来的样本去求这两个分布的差异。
六、知识回顾:KL散度、JS散度和交叉熵
KL散度、JS散度和交叉熵:三者都是用来衡量两个概率分布之间的差异性的指标。不同之处在于它们的数学表达。
对于概率分布P(x)和Q(x)
-
KL散度(Kullback–Leibler divergence)又称KL距离,相对熵。
当P(x)和Q(x)的相似度越高,KL散度越小。
KL散度主要有两个性质:- 不对称性
尽管KL散度从直观上是个度量或距离函数,但它并不是一个真正的度量或者距离,因为它不具有对称性,即D(P||Q)!=D(Q||P)。 - 非负性
相对熵的值是非负值,即D(P||Q)>0。
- 不对称性
-
JS散度(Jensen-Shannon divergence)JS散度也称JS距离,是KL散度的一种变形。
但是不同于KL主要又两方面:- 值域范围
JS散度的值域范围是[0,1],相同则是0,相反为1。相较于KL,对相似度的判别更确切了。 - 对称性
即 JS(P||Q)=JS(Q||P),从数学表达式中就可以看出。
- 值域范围
-
交叉熵(Cross Entropy)
在神经网络中,交叉熵可以作为损失函数,因为它可以衡量P和Q的相似性。
交叉熵和相对熵的关系:
以上都是基于离散分布的概率,如果是连续的数据,则需要对数据进行Probability Density Estimate来确定数据的概率分布,就不是求和而是通过求积分的形式进行计算了。
七、G*的目标
生成器训练的目标是找到一个 G ∗ G^* G∗,去最小化 P G P_G PG与 P d a t a P_{data} Pdata的差异。也就是:
G ∗ = a r g m a x G D i v ( P G , P d a t a ) G^∗ =arg\underset G{max}Div(P_G,P_{data}) G∗=argGmaxDiv(PG,Pdata)
而这个divergence我们没有办法直接去算,我们不知道 P G P_G PG与 P d a t a P_{data} Pdata的公式具体是什么。于是我们通过一个discriminator来计算两个分布间的差异:
D ∗ = a r g m a x D ( D , G ) D^∗ =arg \underset D{max}(D,G) D∗=argDmax(D,G)
那么我们的优化目标就变为:
G ∗ = a r g m i n G m a x D V ( G , D ) G^∗ =arg \underset G{min} \underset D{max}V(G,D) G∗=argGminDmaxV(G,D)
这个看起来很复杂,其实直观理解一下,如下图,我们假设已经把Generator固定住了,图片的曲线表示,红点表示固定住G后的 m a x D V ( G , D ) \underset D{max}V(G,D) DmaxV(G,D), 也就是 P G P_G PG与 P d a t a P_{data} Pdata的差异。而我们的目标是最小化这个差异,所以下图的三个网络中 G 3 G_3 G3是最优秀的。

八、GD Algorithm for GAN
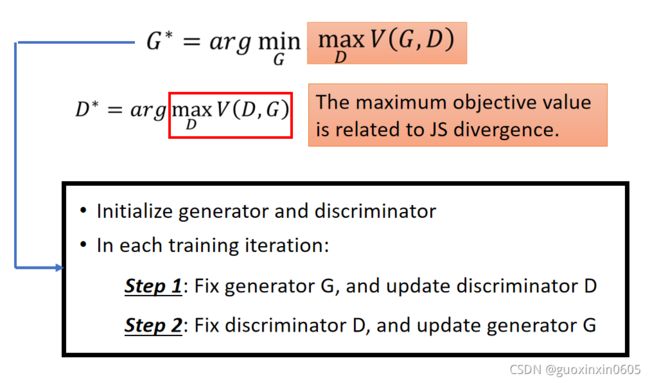
- Step1:首先固定生成器,找到一个能够使V最大的D;
- Step2:然后固定D,找到能够使这个最大D情况下V最小的G。不停的迭代…
从数学看为什么这个算法是在解上面的最小最大过程:
用函数 L ( G ) L(G) L(G)替代 G ∗ G^* G∗中的 m a x D V ( G , D ) \underset D{max}V(G,D) DmaxV(G,D):
G ∗ = a r g m i n G L ( G ) G^∗ =arg\underset G{min} L(G) G∗=argGminL(G)
那么找最好的G的话就用梯度下降(和一般的train是一样的);θ是表示G的参数
但是L(G)有个max操作,但是它依然也是可以做微分的: 假设有个函数f(x)是max三个子函数,f(x)其实 就是每个阶段取最大值 最终求微分的过程就是在每一个点x,先看哪个子函数在这个点最大,微分值就是最大的那个子函数的微分值。也就是梯度下降依然适用,就是每次更新参数的时候先看自己在那个范围,再用这个范围的函数求梯度,然后更新;重复…

也就是说函数中有max操作,也是可以做梯度下降的。
明白这个之后我们继续来看整个 G ∗ G^* G∗如何算:
-
给定一个 G 0 G_0 G0找到可以使得 V ( G 0 , D ) V(G_0,D) V(G0,D)最大的 D ∗ D^* D∗,这个过程可以用梯度上升来求解。 V ( G 0 , D 0 ∗ ) V(G_0,D_0^*) V(G0,D0∗) 就是在求 P G P_G PG与 P d a t a P_{data} Pdata的JS divergence(前面已经证明过了)
-
找到 m a x D V ( G , D ) \underset D{max}V(G,D) DmaxV(G,D)后,对
G ∗ = a r g m i n G m a x D V ( G , D ) G^∗ =arg \underset G{min} \underset D{max}V(G,D) G∗=argGminDmaxV(G,D)求导, θ G ← θ G − η ∂ V ( G , D 0 ∗ ) ∂ θ G \theta_G \leftarrow \theta_G - \eta\frac{\partial{V(G,D_0^*)}}{\partial\theta_G} θG←θG−η∂θG∂V(G,D0∗) 更新参数得到 G 1 G_1 G1, 这个过程其实是在最小化JSd ivergence -
重新寻找 D 1 ∗ D_1^* D1∗可以最大化 V ( G 1 , D ) V(G_1,D) V(G1,D)。这个过程求的是 P G P_G PG与 P d a t a P_{data} Pdata的JS divergence
-
θ G ← θ G − η ∂ V ( G , D 0 ∗ ) ∂ θ G \theta_G \leftarrow \theta_G - \eta\frac{\partial{V(G,D_0^*)}}{\partial\theta_G} θG←θG−η∂θG∂V(G,D0∗) 得到 G 1 G_1 G1,这个过程可以看做是在最小化JS divergence,这个过程需要注意不要让G 变化得太大,尽量让 G 0 , G 1 G_0,G_1 G0,G1的差别不要太大(下面的注意说明了原因)。这也是训练过程中的一个tricks
-
然后不断循环……
注意:
其实在train过程中不是真正的minimize JS散度,为什么呢?
刚开始的第一步,先找一个 G 0 G_0 G0 ,然后找 G 0 G_0 G0的最大V就是 G 0 G_0 G0下的散度; 当你的G在train时变了一点,你的function V(G,D)就变了;此时由于D固定,所以JS散度会变得不再是此刻G下的JS散度了。
因此前提假设是 V ( G 0 , D ) V(G_0,D) V(G0,D)和 V ( G 1 , D ) V(G_1,D) V(G1,D)是很像的;(G的参数变化很小)
因此在train生成器的时候不能更新的太多次,因为这个过程中D是不变的
但是在train判别器的时候要train到底,因为你在找当前G的JS散度。

假设在 G 0 G_0 G0的时候, V ( G 0 , D ) V(G_0,D) V(G0,D)的曲线如上图左边所示,然后 D 0 ∗ D_0^* D0∗使得 V ( G 0 , D ) V(G_0,D) V(G0,D)最大,这个时候的JSD是 V ( G 0 , D 0 ∗ ) V(G_0,D_0^*) V(G0,D0∗)between P G P_G PGand P d a t a P_{data} Pdata,然后我们用梯度下降更新 G 0 G_0 G0,将其变成 G 1 G_1 G1,这个时候由于G的值变化后, V ( G 1 , D ) V ( G_1 , D ) V(G1,D)的曲线发生了变化(参考上面 f ( x ) = max { f 1 ( x ) , f 2 ( x ) , f 3 ( x ) } f ( x ) = \max \{ f_1 ( x ) , f_2 ( x ) , f_3 ( x ) \} f(x)=max{f1(x),f2(x),f3(x)}的例子),这个新曲线 V ( G 1 , D 1 ∗ ) V(G_1,D_1^*) V(G1,D1∗)如上图的右边所示,这个时候的最大值就不在 D 0 ∗ D_0^* D0∗了 ,离它很远,这个时候的JSD变成了 V ( G 1 , D 1 ∗ ) V(G_1,D_1^*) V(G1,D1∗), 可以看到后面的JSD明显要变大了,这样是不对的,因此我们做了假设,假设:
D 0 ∗ ≈ D 1 ∗ D_0^∗ ≈D_1^* D0∗≈D1∗
这个时候从, V ( G 0 , D ) V(G_0,D) V(G0,D)到, V ( G 1 , D ) V(G_1,D) V(G1,D)的曲线变化不会很大。也就是G这个参数只变化了一点点。
我们同样可以用来 D 0 ∗ D_0^* D0∗衡量变化后JSD between P G P_G PGand P d a t a P_{data} Pdata
也就是说GAN的训练技巧:
-
Generator不要一次update太多,也不需要太多的iteration(迭代);
-
而Discriminator可以训练到收敛。因为要找到最大值才能衡量出JSD。
九、In practice(实做中)
理论上V是要取期望值,但是实际上是不可能的。只能用样本的均值进行估计:

从 P d a t a ( x ) P_{data}(x) Pdata(x)从抽取样本 { x 1 , x 2 , . . . , x m } \{x^1,x^2,...,x^m\} {x1,x2,...,xm},从 P G ( x ) P_G(x) PG(x)中抽取样本 { x ~ 1 , x ~ 2 , . . . , x ~ m } \{\widetilde{x}^1,\widetilde{x}^2,...,\widetilde{x}^m\} {x 1,x 2,...,x m}
M a x i m i z e V ~ = 1 m ∑ i = 1 m l o g D ( x i ) + 1 m ∑ i = 1 m l o g ( 1 − D ( x ~ i ) ) Maximize \ \ \ \widetilde{V} = \frac{1}{m}\sum_{i=1}^mlogD(x^i)+\frac{1}{m}\sum_{i=1}^mlog(1-D(\widetilde{x}^i)) Maximize V =m1∑i=1mlogD(xi)+m1∑i=1mlog(1−D(x i))
上面这个事情实际上就是在训练一个Binary Classifier,记为D,D后面接一个sigmoid函数,使得输出值在[0,1]之间
我们把 { x 1 , x 2 , . . . , x m } \{x^1,x^2,...,x^m\} {x1,x2,...,xm}from P d a t a ( x ) P_{data}(x) Pdata(x)看做Positive examples;
我们把 { x ~ 1 , x ~ 2 , . . . , x ~ m } \{\widetilde{x}^1,\widetilde{x}^2,...,\widetilde{x}^m\} {x 1,x 2,...,x m} from generator P G ( x ) P_G(x) PG(x)看做Negative examples
目标是最小化上面两组数据的Cross-entropy,计算这个交叉熵的公式推导出来就是上面那个公式 V ~ \tilde{V} V~
十、Algorithm for GAN
首先train判别器,实际上没办法train到收敛,可以定义训练k次;(JS散度是什么)
之后train生成器:其中第一项是与生成器无关的,由于G不能训练太多,所以updata一次就好(最小化JS散度)

因为这些步骤在前面的GAN基础中已经说过了,这里就不细说了,我将之前的解说复制了一下:
-
首先初始化判别器和生成器
-
然后从database中抽取m个图片(like batch size);
从一个分布中抽取m个vector
使用m个vector产生m个image。 之后去调整判别器:
首先把m张真实图片都拿出来,经过判别器得到分数,然后经过log再统统平均起来(当然希望这个越大越好,因为希望真实的图片得分高);对于生成器生成的m张图片当然希望值越小越好,因此用1-值,其越大越好。因此使用梯度上升的方法,调节判别器参数。(实际训练过程是给真实图片赋值为1,生成图片赋值为0;训练二分类器;等同于上述过程)
-
从一个分布中抽取m个vector
重新生成m张图片,G(Z)就是一张图片,再把它丢到判别器中D(G(Z));再对所有的生成的求平均,在D不改变的情况下,希望这个值越小越好

按上面的算法:,我们可以知道Generator目标函数应该是:
V = E x ∼ P d a t a [ l o g D ( x ) ] + E x ∼ P G [ l o g ( 1 − D ( x ) ) ] V=E_{x∼P_{data}}[logD(x)]+ E_{x∼P_G}[log(1−D(x))] V=Ex∼Pdata[logD(x)]+Ex∼PG[log(1−D(x))]
然后第一项和G GG函数无关,所以在求最小值的时候可以忽略:
V = E x ∼ P G [ l o g ( 1 − D ( x ) ) ] V=E_{x∼P_G}[log(1−D(x))] V=Ex∼PG[log(1−D(x))]
但是,在论文原文在实作的时候把这个函数改为:
V = E x ∼ P G [ − l o g ( D ( x ) ) ] V=E_{x∼P_G}[-log(D(x))] V=Ex∼PG[−log(D(x))]
上图中我们给出了两个函数的图像。
红色曲线对应 l o g ( 1 − D ( x ) ) log(1-D(x)) log(1−D(x)):江湖人称Minimax GAN (MMGAN)
蓝色曲线对应 − l o g ( D ( x ) ) -log(D(x)) −log(D(x)):江湖人称Non-saturating GAN (NSGAN) (saturating /ˈsætʃəreɪtɪŋ/:饱和的;浸透的)
我们可以看到,红色曲线由于刚开始的Generator 没有训练过,它的生成对象都很假,很容易被识破,因此刚开始的 l o g ( 1 − D ( x ) ) log(1-D(x)) log(1−D(x))值很小。
不好训练,换成蓝色曲线后,两个曲线都是下降趋势,没有变,但是蓝色曲线刚开始的值很大,适合做梯度下降。
其实后来实验证明两种结果都差不多。
老师给出了他的猜想,蓝色曲线其实就是把label x from P G P_G PGas positive.就是把生成对象和真实对象的标签换一下。
总结
本章主要介绍GAN的数学理论。GAN可以看过很多例子之后自己生成新的信息,这些信息在高维空间中有一定的分布范围,那么我们的目标就是要找到它的分布,使得我们寻找的分布越靠近真实的数据集分布越好。在GAN之前,也有很多方法可以生成,比如最大似然估计和最小KL散度,其中我们自定义的分布如果采用高斯混合模型,则有非常多的限制,会导致我们生成的图会比较糊,但如果是其他普遍的,也可能会导致算式中的项比较难计算,可以用生成器和鉴别器解决这个问题。在进行数学推论过程中,一定要看仔细,进行提取或者合并的时候不要漏掉。
在推论的部分上要多进行研究推算。