高等代数 线性映射(第9章)2 线性映射的矩阵表示,特征值与特征向量,对角化
一.线性映射的矩阵表示(9.3)
1.线性映射的矩阵表示
(1)概念:

(2)线性变换的矩阵的维数:
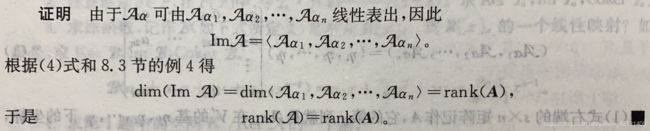
命题1:设 Ꭿ Ꭿ Ꭿ是域 F F F上 n n n维线性空间 V V V上的线性变换,它在 V V V的1个基 α 1 . . . α n α_1...α_n α1...αn下的矩阵为 A A A,则 r a n k ( Ꭿ ) = r a n k ( A ) ( 9 ) rank(Ꭿ)=rank(A)\qquad(9) rank(Ꭿ)=rank(A)(9)
2. H o m ( V , V ′ ) Hom(V,V') Hom(V,V′)与 M s × n ( F ) M_{s×n}(F) Ms×n(F)的关系
(1)作为线性空间的同构关系:
定理1:设 V , V ′ V,V' V,V′分别是域 F F F上的 n , s n,s n,s维线性空间,则 V V V到 V ′ V' V′的线性映射 Ꭿ Ꭿ Ꭿ与其在 V V V的1个基和 V ′ V' V′的1个基下的矩阵 A A A的对应是线性空间 H o m ( V , V ′ ) Hom(V,V') Hom(V,V′)到 M s × n ( F ) M_{s×n}(F) Ms×n(F)的1个同构映射,从而 H o m ( V , V ′ ) ≅ M s × n ( F ) ( 12 ) d i m ( H o m ( V , V ′ ) ) = s n = ( d i m V ) ( d i m V ′ ) ( 13 ) Hom(V,V')\cong M_{s×n}(F)\qquad(12)\\dim(Hom(V,V'))=sn=(dim\,V)(dim\,V')\qquad(13) Hom(V,V′)≅Ms×n(F)(12)dim(Hom(V,V′))=sn=(dimV)(dimV′)(13)特别地,有 H o m ( V , V ) ≅ M n ( F ) ( 14 ) d i m ( H o m ( V , V ) ) = n 2 = ( d i m V ) 2 ( 15 ) Hom(V,V)\cong M_{n}(F)\qquad(14)\\dim(Hom(V,V))=n^2=(dim\,V)^2\qquad(15) Hom(V,V)≅Mn(F)(14)dim(Hom(V,V))=n2=(dimV)2(15)
(2)作为代数的同构关系:

定理2:设 V V V是域 F F F上的 n n n维线性空间, V V V上的线性变换 Ꭿ Ꭿ Ꭿ与其在 V V V的1个基下的矩阵 A A A的对应是代数 H o m ( V , V ) Hom(V,V) Hom(V,V)到代数 M n ( F ) M_{n}(F) Mn(F)的1个同构映射,从而代数 H o m ( V , V ) Hom(V,V) Hom(V,V)与代数 M n ( F ) M_{n}(F) Mn(F)是同构的
注:从上述推导过程看出 Ꭿ [ ( α 1 . . . α n ) B ] = ( Ꭿ α 1 . . . Ꭿ α n ) B = [ Ꭿ ( α 1 . . . α n ) ] B ( 17 ) Ꭿ[(α_1...α_n)B]=(Ꭿα_1...Ꭿα_n)B\\\qquad\qquad\qquad\qquad\quad\:\,\,=[Ꭿ(α_1...α_n)]B\qquad(17) Ꭿ[(α1...αn)B]=(Ꭿα1...Ꭿαn)B=[Ꭿ(α1...αn)]B(17)并且当 B B B是 n × m n×m n×m矩阵时,(17)式仍成立
3.向量在线性映射下的象的坐标:
4.线性变换在不同基下的矩阵间的关系
(1)线性变换在不同基下的矩阵相似:
定理3:设 V V V是域 F F F上的 n n n维线性空间, V V V上的1个线性变换 Ꭿ Ꭿ Ꭿ在基 α 1 . . . α n α_1...α_n α1...αn下的矩阵为 A A A,在基 η 1 . . . η s η_1...η_s η1...ηs下的矩阵为 B B B,从基 α 1 . . . α n α_1...α_n α1...αn到基 η 1 . . . η s η_1...η_s η1...ηs的过渡矩阵为 S ① S^① S①,则 B = S − 1 A S ( 22 ) B=S^{-1}AS\qquad(22) B=S−1AS(22)
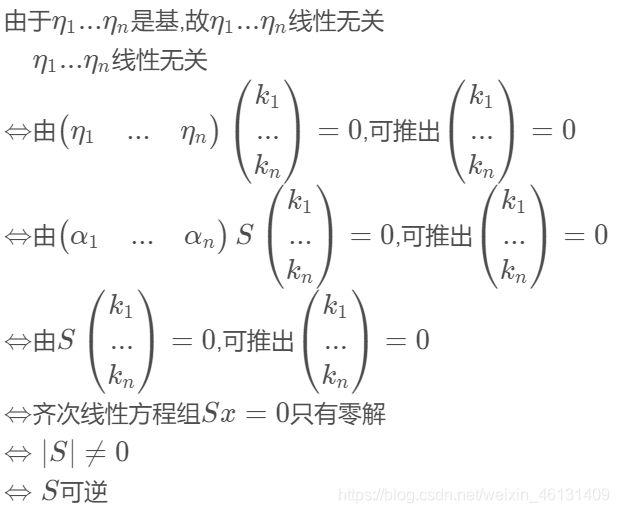
注:①易证明基到基的过渡矩阵 S S S一定可逆:
(2)线性变换的行列式/迹/秩:


(3)相似标准型:
二.特征值与特征向量,可对角化的条件(9.4)
1.线性变换的特征值与特征向量
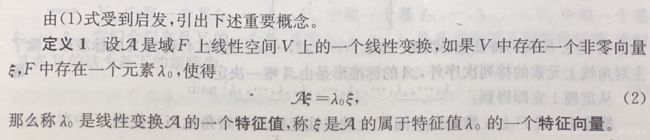
(1)概念:

(2)线性变换的特征值/特征向量与矩阵的特征值/特征向量:

2.线性变换可对角化的条件
(1)线性变换可对角化的概念:
![]()
(2)线性变换可对角化的条件:

定理4:域 F F F上 n n n维线性空间 V V V上的线性变换 Ꭿ Ꭿ Ꭿ可对角化当且仅当 Ꭿ Ꭿ Ꭿ有 n n n个线性无关的特征向量 ξ 1 . . . ξ n \xi_1...\xi_n ξ1...ξn,此时 Ꭿ Ꭿ Ꭿ在基 ξ 1 . . . ξ n \xi_1...\xi_n ξ1...ξn下的矩阵为 [ λ 1 λ 2 . . . λ n ] ( 4 ) \left[\begin{matrix}λ_1\\&λ_2\\&&...\\&&&λ_n\end{matrix}\right]\qquad(4) ⎣⎢⎢⎡λ1λ2...λn⎦⎥⎥⎤(4)其中 λ i λ_i λi是 ξ i \xi_i ξi所属的特征值(即 Ꭿ ξ i = λ i ξ i Ꭿ\xi_i=λ_i\xi_i Ꭿξi=λiξi), i = 1 , 2... n i=1,2...n i=1,2...n;矩阵(4)称为 Ꭿ Ꭿ Ꭿ的标准型;除了主对角线上元素的排列次序外, Ꭿ Ꭿ Ꭿ的标准型是由 Ꭿ Ꭿ Ꭿ唯一决定的
推论1:域 F F F上 n n n维线性空间 V V V上的线性变换 Ꭿ Ꭿ Ꭿ可对角化当且仅当 V V V中存在由 Ꭿ Ꭿ Ꭿ的特征向量组成的1个基
(3)特征子空间:
注:①对线性变换 Ꭿ Ꭿ Ꭿ的任意特征值 λ 0 λ_0 λ0,必有零向量属于 V λ 0 V_{λ_0} Vλ0;即 V λ 0 = { ξ 1 , ξ 2 . . . ξ m , 0 } V_{λ_0}=\{\xi_1,\xi_2...\xi_m,0\} Vλ0={ξ1,ξ2...ξm,0},其中 ξ i ( i = 1 , 2... n ) \xi_i\,(i=1,2...n) ξi(i=1,2...n)为属于 λ 0 λ_0 λ0的所有特征向量, 0 0 0为零向量
推论2:域 F F F上 n n n维线性空间 V V V上的线性变换 Ꭿ Ꭿ Ꭿ可对角化当且仅当 Ꭿ Ꭿ Ꭿ的属于不同特征值的特征子空间的维数之和等于 n n n
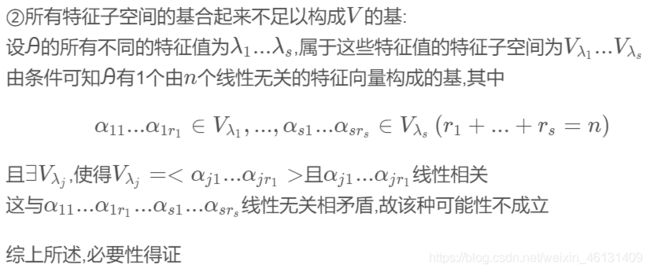
推论3:域 F F F上 n n n维线性空间 V V V上的线性变换 Ꭿ Ꭿ Ꭿ可对角化当且仅当 Ꭿ Ꭿ Ꭿ的所有不同的特征值的特征子空间的基合起来是 V V V的1个基


推论4:域 F F F上 n n n维线性空间 V V V上的线性变换 Ꭿ Ꭿ Ꭿ可对角化当且仅当下式成立: V = V λ 1 ⊕ V λ 2 ⊕ . . . ⊕ V λ s ( 8 ) V=V_{λ_1}\oplus V_{λ_2}\oplus...\oplus V_{λ_s}\qquad(8) V=Vλ1⊕Vλ2⊕...⊕Vλs(8)其中 λ 1 , λ 2 . . . λ s λ_1,λ_2...λ_s λ1,λ2...λs是 Ꭿ Ꭿ Ꭿ全部的不同的特征值
该推论是通过线性变换研究线性空间结构的体现

(4)特征多项式:
命题2:域 F F F上 n n n维线性空间 V V V上的线性变换 Ꭿ Ꭿ Ꭿ可对角化当且仅当 Ꭿ Ꭿ Ꭿ的特征多项式在 F [ λ ] F[λ] F[λ]中可分解成 ( λ − λ 1 ) l 1 ( λ − λ 2 ) l 2 . . . ( λ − λ s ) l s ( 12 ) (λ-λ_1)^{l_1}(λ-λ_2)^{l_2}...(λ-λ_s)^{l_s}\qquad(12) (λ−λ1)l1(λ−λ2)l2...(λ−λs)ls(12)其中 λ 1 . . . λ s λ_1...λ_s λ1...λs两两不等,且 Ꭿ Ꭿ Ꭿ的每个特征值 λ i ( i = 1 , 2... s ) λ_i\,(i=1,2...s) λi(i=1,2...s)的几何重数等于其代数重数
附录. n n n个线性空间的笛卡儿积
设 V V V是域 F F F上的线性空间,则 n n n个 V V V的笛卡儿积为 V n : = V × V × . . . × V ⏟ n 个 : = { ( α 1 , α 2 . . . α n ) ∣ a i ∈ V , i = 1 , 2... n } V^n:=\underbrace{V×V×...×V}_{n个}:=\{(α_1,α_2...α_n)\,|\,a_i∈V,i=1,2...n\} Vn:=n个 V×V×...×V:={(α1,α2...αn)∣ai∈V,i=1,2...n}规定 ( α 1 , α 2 . . . α n ) = ( β 1 , β 2 . . . β n ) ⇔ α i = β i ( i = 1 , 2... n ) (α_1,α_2...α_n)=(β_1,β_2...β_n)⇔α_i=β_i\,(i=1,2...n) (α1,α2...αn)=(β1,β2...βn)⇔αi=βi(i=1,2...n)
定义加法运算:若 ( α 1 , α 2 . . . α n ) , ( β 1 , β 2 . . . β n ) ∈ V n (α_1,α_2...α_n),(β_1,β_2...β_n)∈V^n (α1,α2...αn),(β1,β2...βn)∈Vn,则 ( α 1 , α 2 . . . α n ) + ( β 1 , β 2 . . . β n ) : = ( α 1 + β n , α 2 + β n . . . α n + β n ) (α_1,α_2...α_n)+(β_1,β_2...β_n):=(α_1+β_n,α_2+β_n...α_n+β_n) (α1,α2...αn)+(β1,β2...βn):=(α1+βn,α2+βn...αn+βn)
定义纯量乘法运算:若 ( α 1 , α 2 . . . α n ) ∈ V n , k ∈ F (α_1,α_2...α_n)∈V^n,k∈F (α1,α2...αn)∈Vn,k∈F,则 k ( α 1 , α 2 . . . α n ) : = ( k α 1 , k α 2 . . . k α n ) k(α_1,α_2...α_n):=(kα_1,kα_2...kα_n) k(α1,α2...αn):=(kα1,kα2...kαn)
易证明 V n V^n Vn为域 F F F上的线性空间
定义 V n V^n Vn中元素与域 F F F上的矩阵 A , B A,B A,B的乘法(相当于按列分块的矩阵与普通矩阵的乘法): [ α 1 . . . α n ] [ a 11 . . . a 1 m . . . . . . . . . a n 1 . . . a n m ] = ( a 11 α 1 + . . . + a n 1 α n , a 12 α 1 + . . . + a n 2 α n . . . a 1 m α 1 + . . . + a n m α n ) ∈ V m \left[\begin{matrix}α_1&...&α_n\end{matrix}\right]\left[\begin{matrix}a_{11}&...&a_{1m}\\...&...&...\\a_{n1}&...&a_{nm}\end{matrix}\right]\qquad\qquad\quad\\\quad\:\:=(a_{11}α_1+...+a_{n1}α_n,a_{12}α_1+...+a_{n2}α_n...a_{1m}α_1+...+a_{nm}α_n)∈V^m [α1...αn]⎣⎡a11...an1.........a1m...anm⎦⎤=(a11α1+...+an1αn,a12α1+...+an2αn...a1mα1+...+anmαn)∈Vm该运算满足以下运算法则:
① [ ( α 1 , α 2 . . . α n ) A ] B = ( α 1 , α 2 . . . α n ) ( A B ) [(α_1,α_2...α_n)A]B=(α_1,α_2...α_n)(AB) [(α1,α2...αn)A]B=(α1,α2...αn)(AB)
② k [ ( α 1 , α 2 . . . α n ) A ] = [ k ( α 1 , α 2 . . . α n ) ] A = ( α 1 , α 2 . . . α n ) ( k A ) k[(α_1,α_2...α_n)A]=[k(α_1,α_2...α_n)]A=(α_1,α_2...α_n)(kA) k[(α1,α2...αn)A]=[k(α1,α2...αn)]A=(α1,α2...αn)(kA)