深度学习入门——感知机(学习笔记)
目录
感知机概念
感知机学习过程和权值更新规则
多层感知机
感知机案例代码
感知机概念
首先我们需要大致了解生物神经元的工作流程,在生物神经网络中,每个神经元与其他神经元通过突触进行连接。神经元之间的信息传递,属于化学物质的传递。当它兴奋时,就会向与它相连的神经元发送化学物质,从而改变这些神经元的电位。如果某些神经元的电位超过了一个阈值,那么它就会被激活,接着向其他神经元发送化学物质,如此进行层层传播。
感知机模拟生物神经元的工作流程,通过设置各个神经元的某种连接权重,将神经元接收到的所有输入值按照权重叠加起来,再与当前神经元的阈值进行比较(我理解的阈值是一个临界值,代表了可以上下波动的幅度),最终通过激活函数向外表达输出。其模型可以用以下公式表示( 为第i个神经元的输入,
为第i个神经元的输入, 为第i个神经元的连接权重,
为第i个神经元的连接权重, 为阈值,f为激活函数,y是最终输出):
为阈值,f为激活函数,y是最终输出):

神经元之间的连接权重大小代表了连接的强弱,其实是希望获得不同关注重点的信息。阈值也被称为偏置,表示神经元是否更容易被激活。神经元的工作模型存在激活和抑制两种状态的跳变,所以理想的激活函数是阶跃函数(实际使用中常用sigmoid函数来代替阶跃函数,因为阶跃函数不光滑、不连续,不便于求导、寻找极值)。感知机中激活函数使用的是阶跃函数,这里可以理解为当刺激强度(加权和)大于等于该神经元的阈值时,该神经元表现为兴奋状态,输出y=1;反之则表现出抑制状态,输出y=0。
感知机最初并不知道正确的权重应该是多少,在一开始只是设置一个随机值,然后根据训练数据计算得到输出,再通过计算误差(实际值与输出值之差)来调整权重,使其修改后计算的误差减小,最终使得输入的每个数据都能计算出正确的结果,这就是感知机的学习过程。所谓的神经网络的学习规则,就是调整神经元之间的连接权值和神经元内部阈值的规则。感知机是一种简单的二分类的线性分类模型(二分类中,一般用y=1表示一类,用y=0表示另一类),对于输入数据是二维的,感知机的几何意义是找一条直线将表示输入数据的平面中的点分开;那么如果输入数据是三个维度的,则相当于找到一个平面,在三维空间中将它们分成两类;对于更高维度的数据,就是寻找对应的超平面。该平面和超平面方程都是由权值参数来确定的。

感知机学习过程和权值更新规则
第一步,随机初始化权值![]() ,为了统一描述,用
,为了统一描述,用 代替 (即代替阈值)。
代替 (即代替阈值)。
第二步,输入一个样本![]() 和对应的期望结果y。
和对应的期望结果y。
第三步,激活函数加工后的感知机输出结果:
第四步,计算误差![]() ,以误差为基础对每个权值
,以误差为基础对每个权值![]() ,按以下规则进行调整(
,按以下规则进行调整( 称为学习率,是一个人为设置的常量,一般在 0-1 之间,用来控制每次权重的调整力度。它本身的值是比较难确定的,依赖于人工的经验(属于超参数范畴),如果太小,网络调参的次数较多,收敛会很慢;如果太大,会错过参数的最优解。一般将其初始值设置为一个较小的值,如0.1):
称为学习率,是一个人为设置的常量,一般在 0-1 之间,用来控制每次权重的调整力度。它本身的值是比较难确定的,依赖于人工的经验(属于超参数范畴),如果太小,网络调参的次数较多,收敛会很慢;如果太大,会错过参数的最优解。一般将其初始值设置为一个较小的值,如0.1):
![]()
![]()
第五步,循环以上步骤,对所有样本进行训练,直到训练一定轮数或者误差达到最小时停止。
注:
1. 在使用感知机实现分类问题时,根据某个样本的误差,对权值进行调整时,可能引起其他原本分类正确的样本出错。所以每次调整之后,要把所有样本都重新计算一遍。
2. 为了减小每个样本由于误差不同而进行多次调整的问题,可以把所有样本的误差求和,然后再对权值进行一次调整,实现每次调整让总体误差最小。
3. 能线性分割不同样本的直线非常多,根据初始参数和学习率,最终得到的权值参数结果并不唯一。
4. 感知机旨在通过最小化误差,来优化分类超平面,从而达到对新实例实现准确预测。而由于感知机只有输出层神经元可以进行激活函数的处理,即它只拥有单层的神经元,因此它的学习能力是相对有限的。如果这些样本本身不是用一条直线可以分割的(即非线性可分),那么这个学习过程就无法终止。因此,感知机无法解决线性不可分问题。
多层感知机
随着研究的进行,人们发现在输入层与输出层之间增加隐含层,构成一种多层神经网络结构,每一层神经元仅与下一层的神经元全连接在同一层之内,神经元彼此不连接,而且跨层之间的神经元,彼此也不相连。这样的结构可以解决非线性分类的问题,增强感知机的分类能力,这就是多层感知机(输入层不算入神经网络层次,且隐含层和输出层中的神经元都拥有激活函数)。

由于当时感知机只给出了最后一层神经元权值的训练方法,所以其他层的参数则只能人为设置。单层感知机能够根据已知数据来学习参数,在线性可分的问题领域具有很好的效果,但它不能处理线性不可分问题。而多层感知机只能训练最后一层参数, 实用性有限。反向传播算法(即BP 算法)的提出,使得多层神经网络的训练变得简单可行,证明了多层神经网络具有很强的学习能力。从而将神经网络的研究推向了新的高潮(BP 算法将会在下一篇学习笔记中涉及)。
感知机案例代码
import matplotlib.pyplot as plt
# 声明了一个感知机类Perception
class Perception():
# input_para_num输入参数个数 acti_func激活函数
def __init__(self, input_para_num, acti_func):
self.activator = acti_func
# 权重向量初始化
self.weights = [-1, 1, 1]
# 针对每个输入向量,输出感知机的计算结果
def predict(self, row_vec):
act_values = 0.0
for i in range(len(self.weights)):
act_values += self.weights[i]*row_vec[i]
return self.activator(act_values)
# 训练权值参数 dataset一组向量、与每个向量对应的label iteration指定迭代次数 rate学习率
def train(self, dataset, iteration, rate):
weight = "["
for i in range(iteration):
for input_vec_label in dataset:
# 计算感知机在当前权重下的输出
prediction = self.predict(input_vec_label)
print("输出", prediction)
# 更新权重
self._update_weights(input_vec_label, prediction, rate)
weight = weight+str(self.weights)+","
return weight.strip(",")+"]"
# 更新权重
def _update_weights(self, input_vec_label, prediction,rate):
delta = input_vec_label[-1]-prediction
print("误差", delta)
for i in range(len(self.weights)):
self.weights[i] += rate*delta*input_vec_label[i]
print("权重", self.weights)
# 定义激活函数f
def func_activator(input_value):
return 1.0 if input_value >= 0.0 else 0.0
def polt(dataset, i, weight):
x1, y1, x2, y2, xx, yy = [], [], [], [], [], []
for row in dataset:
if row[-1] == 1:
x1.append(row[1])
y1.append(row[2])
if row[-1] == 0:
x2.append(row[1])
y2.append(row[2])
# 设置字体样式
plt.rcParams['font.family'] = ['sans-serif']
# 设置字体显示中文
plt.rcParams['font.sans-serif'] = ['SimHei']
# 设置绘图的坐标范围
plt.axis([0, 2, 0, 2])
# bs是blue squares蓝色方块缩写
# ro红色圆点 b-蓝色线条 g^绿色三角形
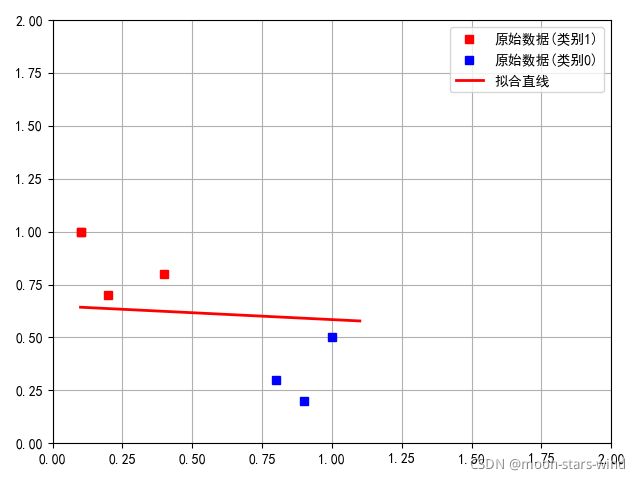
plt.plot(x1, y1, 'rs', label='原始数据(类别1)')
plt.plot(x2, y2, 'bs', label='原始数据(类别0)')
xx.append(0.1)
xx.append(1.1)
yy.append((-weight[i][1]*0.1-weight[i][0])/weight[i][2])
yy.append((-weight[i][1]*1.1-weight[i][0])/weight[i][2])
plt.plot(xx, yy, 'r', linewidth=2, label='拟合直线')
# 显示网格线
plt.grid()
# 显示图中标签
plt.legend()
plt.show()
def get_training_dataset():
# 构建训练数据
dataset = [[1, 0.1, 1, 1], [1, 0.2, 0.7, 1], [1, 0.4, 0.8, 1],
[1, 0.8, 0.3, 0], [1, 0.9, 0.2, 0], [1, 1.0, 0.5, 0],
[1, 0.1, 1, 1]]
return dataset
def train_and_perceptron():
# 创建感知器,输入参数个数为3(虽然是二元函数,把哑元-1算上,是三个),激活函数为func_activator
p = Perception(3, func_activator)
# 获取训练数据,迭代1轮, 学习速率为0.6
dataset = get_training_dataset()
weight = p.train(dataset, 1, 0.6)
for i in range(len(dataset)):
polt(dataset, i, eval(weight))
# 返回训练好的感知机
return p
if __name__ == '__main__':
and_perception = train_and_perceptron()
分类结果图示:
注:如有问题,欢迎批评指正!
(本文参考书目:深度学习之美、人工智能概论)