datawhale 11月学习——水很深的深度学习:循环神经网络
前情回顾
- 深度学习概述和数学基础
- 机器学习基础
- 前馈神经网络
概述
本次学习结合了李宏毅机器学习的相关章节进行学习,从首先补充了计算图的相关知识,随后,学习了RNN的结构,训练,及可能遇到的梯度消失的问题;再进步学习了LSTM的结构,和例子。同时简单使用torch进行了代码实现。还了解了其他经典的循环神经网络,及其主要应用。
目录
-
- 前情回顾
- 概述
- 1 计算图
- 2 RNN
-
- 2.1 为什么需要RNN
- 2.2 RNN的简单案例
- 2.3 基础的RNN结构
- 2.4 RNN的训练
- 2.5 梯度消失
- 3 长短时记忆网络LSTM
-
- 3.1 LSTM的结构
- 3.2 LSTM的例子
- 3.3 进一步理解LSTM
- 3.4 代码实现
- 3.5 其他经典的循环神经网络
- 3.6 循环神经网络的主要应用
- 参考阅读
1 计算图
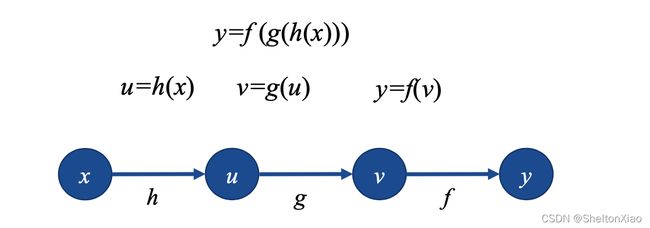
计算图(computation graph)表述了计算过程中各个变量的传递关系及计算过程。
计算图是描述计算结构的一种图,它的元素包括节点(node)和边(edge),节点表示变量,可以是标量、矢量、张量等,而边表示的是某个操作,即函数。
下图表示复合函数

由于反向传播关注求导,我们讨论计算图的求导,可以用链式法则表示,有下面两种情况。
- 情况1
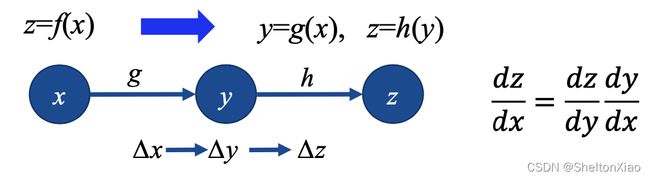
- 情况2

下图给出了计算图的一个案例
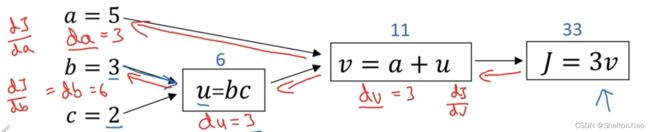
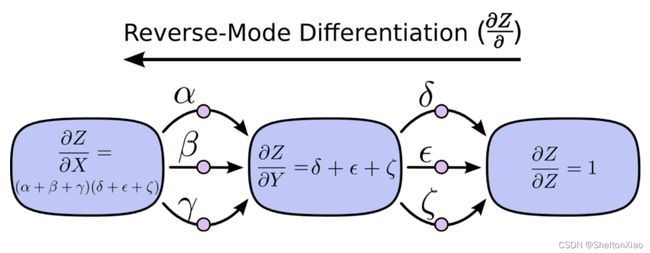
教程里的另一个案例也很好地说明了计算图的传递

前向传播

反向传播
2 RNN
2.1 为什么需要RNN
假设我们现在想要让机器处理一个句子,我们首先要考虑把句子变成向量。
词汇在放入神经网络前,先经过了embedding,变成了一个向量。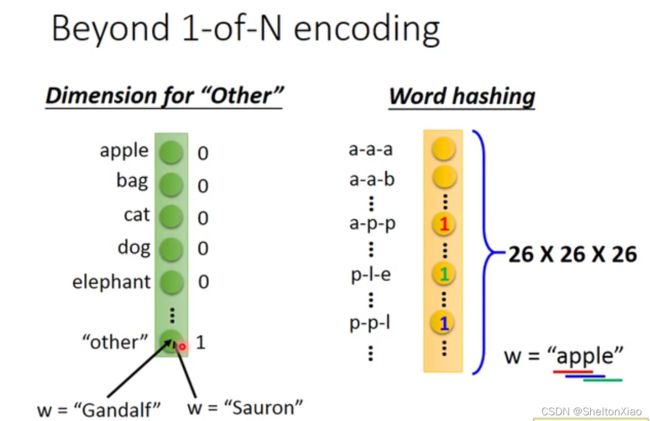
但是,在自然语言处理中,我们容易发现,对于同一个词汇,有可能在不同的句子里代表不同的含义。
如下图,在第一个句子中,Taipei是目的地,在第二个句子中,Taipei是出发地。

对于一般的神经网络来说,同一个输入对应的输出是一样的,显然不能满足我们的要求。
我们希望我们的神经网络有记忆,根据上下文来判断词性。
循环神经网络由此而生。
循环神经网络的发展历程由下图所示

循环神经网络是一种人工神经网络,它的节点间的连接形成一个遵循时间序列的有向图,它的核心思想是,样本间存在顺序关系,每个样本和它之前的样本存在关联。通过神经网络在时序上的展开,我们能够找到样本之间的序列相关性。
RNN的一般结构如下图所示

其中各个符号的表示: x t x_t xt, s t s_t st, o t o_t ot 分别表示的是 t t t时刻的输入、记忆和输出, U U U, V V V, W W W是RNN的连接权重, b s b_s bs, b o b_o bo 是RNN的偏置, σ \sigma σ, φ \varphi φ是激活函数, σ \sigma σ通常选 t a n h tanh tanh或 s i g m o i d sigmoid sigmoid, φ \varphi φ通常选用 s o f t m a x softmax softmax。
2.2 RNN的简单案例
下图展示了RNN的过程,绿色的会存入蓝色内存中
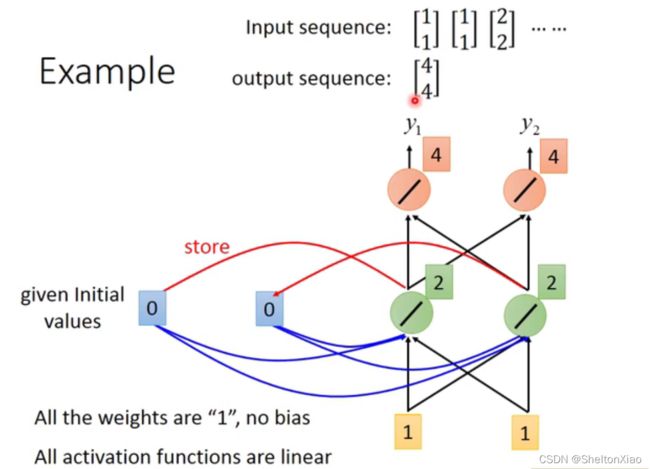
22被存入内存,则此时再输入(1,1),绿色的单元得到1+1+2+2 = 6,就是(6,6)。则输出就是(12,12)。

66被存入内存,洗掉了原来的22,再输入(2,2),此时绿色的单元得到2+2+6+6=16,就是(16,16)。则输出就是(32,32)。

同一个网络在不同的时刻被多次使用。
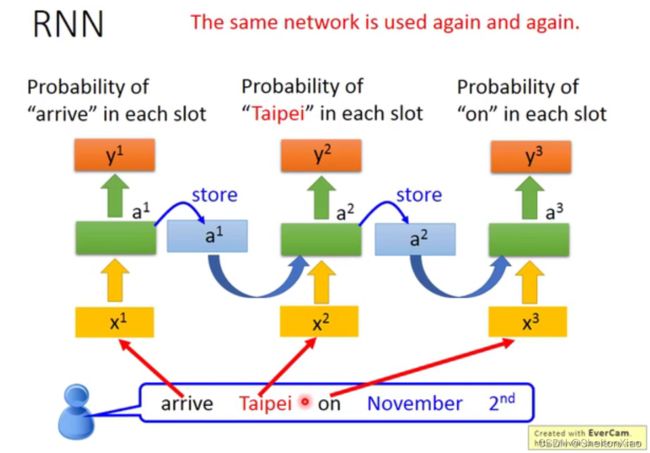
教程里则给出了另一个案例,词性标注的案例。
下图表示了word embedding,词嵌入的过程:

将神经元的输出存到memory中,memory中值会作为下一时刻的输入。在最开始时刻,给定 memory初始值,然后逐次更新memory中的值。

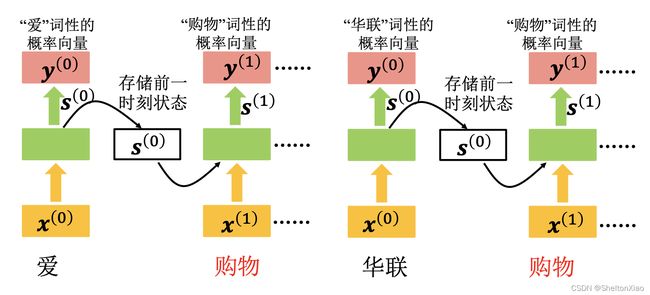
2.3 基础的RNN结构
基础的RNN结构有两种
- Elman Network
存储的是每个时刻的中间值
- Jordan Network
存储的是上一个时刻的输出

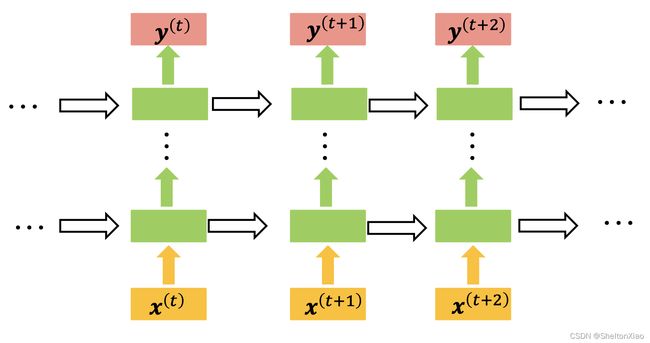
各种不同的RNN结构

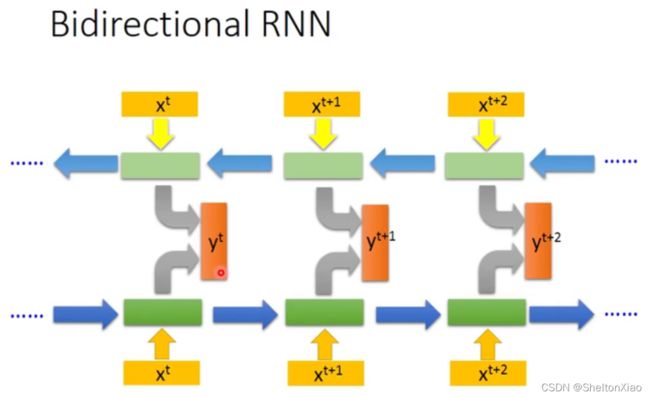
此外,RNN还可以是双向的
2.4 RNN的训练
是在BP算法的基础上,损失函数对所有t时刻求和。
我们先来回顾一下BP算法,就是定义损失函数 Loss 来表示输出 y ^ \hat{y} y^ 和真实标签 y 的误差,通过链式法则自顶向下求得 Loss 对网络权重的偏导。沿梯度的反方向更新权重的值, 直到 Loss 收敛。而这里的 BPTT 算法就是加上了时序演化,后面的两个字母 TT 就是 Through Time。
把所有的损失函数 E E E叠加起来,然后分别求对 U U U、 V V V、 W W W的梯度。

E E E对 U U U, V V V, W W W的梯度等于每一个 E 1 E_1 E1, E 2 E_2 E2,…, E n E_n En对 U U U, V V V, W W W的梯度叠加起来。
其中,求E对W的梯度时,由于不同时刻的 s s s之间相互依赖,所以,依赖关系会一直传递到 t = 0 t=0 t=0的时刻,不能够把上一个时刻的 s s s看作是常数项。
2.5 梯度消失
由于损失函数是很多个时刻的叠加,整体的损失函数对于参数的偏导的曲面是很不平整的,会出现很多断崖
会出现好几种情况
第一种:1→2→3跳跃到悬崖上
第二种:1→2→4踩到墙脚
第三种:1→2→4→5加大学习率后直接飞出去



改变w的值就会有使得output的影响变得平缓。
3 长短时记忆网络LSTM
LSTM可以有效解决RNN梯度消失的问题
LSTM和RNN在处理memory cell里面的值的方式不一样:
RNN每次都把新的值存到memory cell里面,旧的值被替换;
LSTM则用了input gate的计算结果与输入相乘后的值累加到memory cell里面。
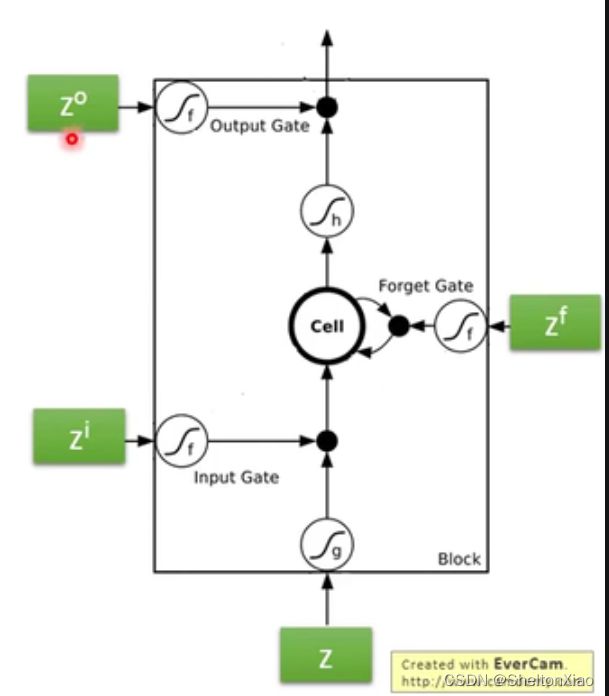
3.1 LSTM的结构
事实上LSTM的cell对应一个神经元。
LSTM,即长短时记忆网络,于1997年被Sepp Hochreiter 和Jürgen Schmidhuber提出来,LSTM是一种用于深度学习领域的人工循环神经网络(RNN)结构。一个LSTM单元(cell)由输入门、输出门和遗忘门组成,三个门控制信息进出单元。

由一个输入,三个控制信号输入,和一个输出构成。
-
input gate乘以权重,代表当前输入信息的接受权重
-
forget gate打开时代表记得,关闭时代表遗忘
-
output gate乘以权重,代表当前输出信息的认可权重

LSTM通过门的机制,对状态进行添加或删除,由此实现长时记忆。
3.2 LSTM的例子
对下面这一系列的输入向量,当x2为1时,将x1添加到记忆里;x2为-1时,记忆重设;x3为1时,将记忆里的值输出。

那么下面的图蓝色对应的是记忆中的值,红色对应的是输出值。

对每一个cell,假设有以下场景:
其中,输入门和输出门是常闭的,遗忘门是常开的。(下图中的绿色框是用于乘以权重的输入值)

则对于第一个输入(3,1,0),input gate打开,同时forget gate打开(记住),而output gate关闭,因此3会被存入内存,但不会被输出。

再仔细看一下这个原理
- x2对应的是input gate乘以权重的位置,而input gate是常关的,只有x2为正值时,input gate 会被打开
- x2对应的是forget gate乘以权重的位置,而forget gate是常开的,当x2为负值时,forget gate会被关闭,然后遗忘
- x3对应的是output gate乘以权重的位置,只有当x3有正输入时,output gate才会被打开,才可以输出
3.3 进一步理解LSTM
LSTM需要的参数是一般的四倍


LSTM随着时间是这样变化的

3.4 代码实现
首先实现一个RNN网络
import torch
from torch import nn
#构造RNN网络,x的维度5,隐层的维度10,网络的层数2
rnn_seq = nn.RNN(5,10,2)
可以随机一个输入
#构造一个输入序列,长为6,batch是3,特征是5
x = torch.randn(6,3,5)
out,ht = rnn_seq(x) # h0可以指定或者不指定
可以看一下out和ht的维度
[IN]: out.shape
[OUT]: torch.Size([10, 3, 100])
[IN]: ht.shape
[OUT]: torch.Size([2, 3, 10])
其中rnn输入含义是
Inputs: input, h_0
- input: tensor of shape :math:
(L, N, H_{in})whenbatch_first=Falseor
:math:(N, L, H_{in})whenbatch_first=Truecontaining the features of
the input sequence. The input can also be a packed variable length sequence.
See :func:torch.nn.utils.rnn.pack_padded_sequenceor
:func:torch.nn.utils.rnn.pack_sequencefor details.- h_0: tensor of shape :math:
(D * \text{num\_layers}, N, H_{out})containing the initial hidden
state for each element in the batch. Defaults to zeros if not provided.
输出含义是
Outputs: output, h_n
- output: tensor of shape :math:
(L, N, D * H_{out})whenbatch_first=Falseor
:math:(N, L, D * H_{out})whenbatch_first=Truecontaining the output features
(h_t)from the last layer of the RNN, for eacht. If a
:class:torch.nn.utils.rnn.PackedSequencehas been given as the input, the output
will also be a packed sequence.- h_n: tensor of shape :math:
(D * \text{num\_layers}, N, H_{out})containing the final hidden state
for each element in the batch.
同样也可以实现一个LSTM网络
#输入维度50,隐层100维,两层
lstm_seq = nn.LSTM(50,100,num_layers=2)
可以随机一个输入
#输入序列seq= 10,batch =3,输入维度=50
lstm_input = torch.randn(10,3,50)
out,(h, c) = lstm_seq(lstm_input)#使用默认的全0隐藏状态
其中lstm的输入含义是
input, (h_0, c_0)
- input: tensor of shape :math:
(L, N, H_{in})whenbatch_first=Falseor
:math:(N, L, H_{in})whenbatch_first=Truecontaining the features of
the input sequence. The input can also be a packed variable length sequence.
See :func:torch.nn.utils.rnn.pack_padded_sequenceor
:func:torch.nn.utils.rnn.pack_sequencefor details.- h_0: tensor of shape :math:
(D * \text{num\_layers}, N, H_{out})containing the
initial hidden state for each element in the batch.
Defaults to zeros if (h_0, c_0) is not provided.- c_0: tensor of shape :math:
(D * \text{num\_layers}, N, H_{cell})containing the
initial cell state for each element in the batch.
Defaults to zeros if (h_0, c_0) is not provided.
输出含义是
output, (h_n, c_n)
- output: tensor of shape :math:
(L, N, D * H_{out})whenbatch_first=Falseor
:math:(N, L, D * H_{out})whenbatch_first=Truecontaining the output features
(h_t)from the last layer of the LSTM, for eacht. If a
:class:torch.nn.utils.rnn.PackedSequencehas been given as the input, the output
will also be a packed sequence.- h_n: tensor of shape :math:
(D * \text{num\_layers}, N, H_{out})containing the
final hidden state for each element in the batch.- c_n: tensor of shape :math:
(D * \text{num\_layers}, N, H_{cell})containing the
final cell state for each element in the batch.
可以看一下维度
[IN]: out.shape
[OUT]: torch.Size([6, 3, 10])
[IN]: h.shape
[OUT]: torch.Size([2, 3, 100])
[IN]: c.shape
[OUT]: torch.Size([2, 3, 100])
3.5 其他经典的循环神经网络
- Gated Recurrent Unit (GRU)
- Peephole LSTM
- Bi-directional RNN (双向RNN)
- Continuous time RNN(CTRNN)
3.6 循环神经网络的主要应用
- 语言模型:预测、问答
- 自动作曲
- 机器翻译
- 自动写作
- 图像描述
参考阅读
1.Recurrent Neural Network