第十一周周报
学习目标:
DDPM
学习内容:
DDPM代码
学习时间:
11.13-11.18
学习产出:
一、DDPM
1、trainer
trainer用来计算损失,即将图片加噪后计算损失,损失公式如下:


extract()函数:选取特下标的t并转换成特定维度
# 根据Loss公式计算Loss
class GaussianDiffusionTrainer(nn.Module):
'''
model=Unet,beta_1=β1,beta_T=βT,(β1,βT指方差的最小值和最大值,β1和βT产生linear schecule,越往后β越大,如果扩散步数T足够大,那么Xt忽悠完全丢掉了原始数据而变成了一个随机噪声),T指的是逆向计算中前向的时间步,
'''
def __init__(self, model, beta_1, beta_T, T):
super().__init__()
self.model = model
self.T = T # 1000
# 得到一个线性增长的Bt
self.register_buffer(
'betas', torch.linspace(beta_1, beta_T, T).double())
# 通过Bt得到论文中的α
alphas = 1. - self.betas
# 通过α累乘得到αt
alphas_bar = torch.cumprod(alphas, dim=0)
# calculations for diffusion q(x_t | x_{t-1}) and others
self.register_buffer(
'sqrt_alphas_bar', torch.sqrt(alphas_bar))
self.register_buffer(
'sqrt_one_minus_alphas_bar', torch.sqrt(1. - alphas_bar))
print('计算loss')
def forward(self, x_0):
"""
Algorithm 1.
随机生成t和噪声,通过t和噪声得到x_t(即通过t和噪声得到最终的噪声图像),计算出loss后返回
"""
t = torch.randint(self.T, size=(x_0.shape[0],), device=x_0.device) # torch.Size([64, 3, 32, 32]),生成的最大数为1000
# 随机生成一个和X0一样的噪声
noise = torch.randn_like(x_0)
# 正向得到最终噪声图片Xt
x_t = (
extract(self.sqrt_alphas_bar, t, x_0.shape) * x_0 +
extract(self.sqrt_one_minus_alphas_bar, t, x_0.shape) * noise)
# 计算纯噪声noise和生成噪声Xt的loss
loss = F.mse_loss(self.model(x_t, t), noise, reduction='none')
return loss
forward()中
![]()
计算时间步
![]()
生成纯噪声noise

通过计算

得到最终得噪声图片Xt。
![]()
然后通过
计算loss。计算loss伪代码为:

2、sampler
# 采样过程
class GaussianDiffusionSampler(nn.Module):
'''
mean_type表示均值采用的类型,var_type表示方差β固定很小或很大的值
'''
def __init__(self, model, beta_1, beta_T, T, img_size=32,
mean_type='eps', var_type='fixedlarge'):
# xpre通过xt预测xt-1,xstart通过xt预测x0,epsilon为预测误差
assert mean_type in ['xprev' 'xstart', 'epsilon']
assert var_type in ['fixedlarge', 'fixedsmall']
super().__init__()
self.model = model
self.T = T
self.img_size = img_size
self.mean_type = mean_type
self.var_type = var_type
self.register_buffer(
'betas', torch.linspace(beta_1, beta_T, T).double())
# 得到α
alphas = 1. - self.betas
# 得到αt
alphas_bar = torch.cumprod(alphas, dim=0)
# #所有alphas_bar向后移动一位,第一位等于1
# 得到αt-1
alphas_bar_prev = F.pad(alphas_bar, [1, 0], value=1)[:T]
# calculations for diffusion q(x_t | x_{t-1}) and others
self.register_buffer(
'sqrt_recip_alphas_bar', torch.sqrt(1. / alphas_bar))
self.register_buffer(
'sqrt_recipm1_alphas_bar', torch.sqrt(1. / alphas_bar - 1))
# calculations for posterior q(x_{t-1} | x_t, x_0)、
# 方差
self.register_buffer(
'posterior_var',
self.betas * (1. - alphas_bar_prev) / (1. - alphas_bar))
# below: log calculation clipped because the posterior variance is 0 at
# the beginning of the diffusion chain
self.register_buffer(
'posterior_log_var_clipped',
torch.log(
torch.cat([self.posterior_var[1:2], self.posterior_var[1:]])))
# 均值公式中X0前面的常数
self.register_buffer(
'posterior_mean_coef1',
torch.sqrt(alphas_bar_prev) * self.betas / (1. - alphas_bar))
# 均值公式中Xt前面的常数
self.register_buffer(
'posterior_mean_coef2',
torch.sqrt(alphas) * (1. - alphas_bar_prev) / (1. - alphas_bar))
# 计算逆向过程需要的均值和方差
def q_mean_variance(self, x_0, x_t, t):
"""
Compute the mean and variance of the diffusion posterior
q(x_{t-1} | x_t, x_0)
"""
assert x_0.shape == x_t.shape
# 通过均值公式的第一步乘以X0和第二步乘以Xt得到均值
posterior_mean = (
extract(self.posterior_mean_coef1, t, x_t.shape) * x_0 +
extract(self.posterior_mean_coef2, t, x_t.shape) * x_t
)
# 得到方差
posterior_log_var_clipped = extract(
self.posterior_log_var_clipped, t, x_t.shape)
return posterior_mean, posterior_log_var_clipped
def predict_xstart_from_eps(self, x_t, t, eps):
assert x_t.shape == eps.shape
return (
extract(self.sqrt_recip_alphas_bar, t, x_t.shape) * x_t -
extract(self.sqrt_recipm1_alphas_bar, t, x_t.shape) * eps
)
def predict_xstart_from_xprev(self, x_t, t, xprev):
assert x_t.shape == xprev.shape
return ( # (xprev - coef2*x_t) / coef1
extract(
1. / self.posterior_mean_coef1, t, x_t.shape) * xprev -
extract(
self.posterior_mean_coef2 / self.posterior_mean_coef1, t,
x_t.shape) * x_t
)
# 计算逆向过程
def p_mean_variance(self, x_t, t):
# below: only log_variance is used in the KL computations
# 后验分布方差
model_log_var = {
# for fixedlarge, we set the initial (log-)variance like so to
# get a better decoder log likelihood
'fixedlarge': torch.log(torch.cat([self.posterior_var[1:2],
self.betas[1:]])),
'fixedsmall': self.posterior_log_var_clipped,
}[self.var_type]
# print('model_log_var1',model_log_var)
# 计算方差
model_log_var = extract(model_log_var, t, x_t.shape)
# print('model_log_var2',model_log_var)
# Mean parameterization
'''
mean_type == 'xprev'和mean_type == 'xstart'没有使用,这里只用到第三种,即mean_type == 'epsilon'
'''
if self.mean_type == 'xprev': # the model predicts x_{t-1}
# print('xprev')
x_prev = self.model(x_t, t)
x_0 = self.predict_xstart_from_xprev(x_t, t, xprev=x_prev)
model_mean = x_prev
elif self.mean_type == 'xstart': # the model predicts x_0
# print('xstart')
x_0 = self.model(x_t, t)
model_mean, _ = self.q_mean_variance(x_0, x_t, t)
elif self.mean_type == 'epsilon': # the model predicts epsilon
# print('epsilon')
eps = self.model(x_t, t) # 模型预测的噪声
x_0 = self.predict_xstart_from_eps(x_t, t, eps=eps) # 得到均值计算需要的X0
model_mean, _ = self.q_mean_variance(x_0, x_t, t) # 计算均值
else:
raise NotImplementedError(self.mean_type)
x_0 = torch.clip(x_0, -1., 1.)
return model_mean, model_log_var
def forward(self, x_T):
"""
Algorithm 2.
"""
x_t = x_T # torch.Size([64, 3, 32, 32])
# print('x_t', x_t.shape)
for time_step in reversed(range(self.T)):
t = x_t.new_ones([x_T.shape[0], ], dtype=torch.long) * time_step # 时间步,torch.Size([64])
# print('t.shape',t.shape)
mean, log_var = self.p_mean_variance(x_t=x_t, t=t)
# print('mean',mean)
# print('log_var',log_var)
# no noise when t == 0
if time_step > 0:
# print('have noise')
noise = torch.randn_like(x_t)
else:
# print('not noise')
noise = 0
x_t = mean + torch.exp(0.5 * log_var) * noise # 得到Xt-1,循环得到X0
# print('x_t',x_t)
x_0 = x_t
return torch.clip(x_0, -1, 1)
forward()中
通过
![]()
生成时间步。
通过
![]()
计算均值和方差。具体为:

均值类型有‘xprev’、‘xstart’和‘epsilon’三种,这里只使用了‘epsilon’。
即通过

计算方差,由于方差是常数,因此可以直接得出。使用公式为:

通过

计算均值。其中eps为trainer中训练好后预测输出的噪声。然后使用

得出原图片X0.使用公式为
得出X0后,使用
![]()
计算均值,具体为:

使用到的公式为

通过q_mean_variance()函数和p_mean_variance()计算得出均值和方差后,使用
![]()
计算Xt-1,使用的公式为

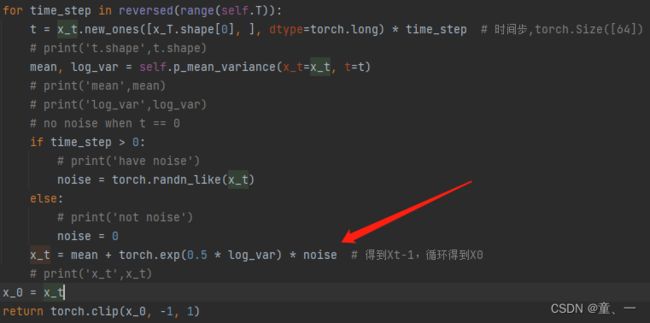
通过for循环将time_step从1000到0的过程就是从Xt到X0的过程。
生成图像伪代码为:

二、Unet网络
Unet网络中分为DownBlocks、Middle和UpBlocks、tail
DownBlocks中一个Block包括两个ResBlock和一个DownSample,将Blocks重复三次再加上两个ResBlock后就构成了DonwBlocks。(特征提取作用)
MIddle由一个具有Attntion的ResBlock和一个普通的ResBlock组成。
UpBlocks中一个Block包括三个ResBlock和一个UpSample,将Blocks重复三次后再加上三个ResBlock就构成了UpBlocks。(特征融合作用)
tail由一个线性层+卷积层构成。
class UNet(nn.Module):
def __init__(self, T, ch, ch_mult, attn, num_res_blocks, dropout):
super().__init__()
assert all([i < len(ch_mult) for i in attn]), 'attn index out of bound'
tdim = ch * 4 #
self.time_embedding = TimeEmbedding(T, ch, tdim) # (1000,128,512)
self.head = nn.Conv2d(3, ch, kernel_size=3, stride=1,
padding=1) # (3,128,kernel_size(3,3),stride(1,1),padding(1,1))
self.downblocks = nn.ModuleList()
chs = [ch] # record output channel when dowmsample for upsample
now_ch = ch
for i, mult in enumerate(ch_mult):
out_ch = ch * mult
for _ in range(num_res_blocks):
self.downblocks.append(ResBlock(
in_ch=now_ch, out_ch=out_ch, tdim=tdim,
dropout=dropout, attn=(i in attn)))
now_ch = out_ch
chs.append(now_ch)
if i != len(ch_mult) - 1:
self.downblocks.append(DownSample(now_ch))
chs.append(now_ch)
self.middleblocks = nn.ModuleList([
ResBlock(now_ch, now_ch, tdim, dropout, attn=True),
ResBlock(now_ch, now_ch, tdim, dropout, attn=False),
])
self.upblocks = nn.ModuleList()
for i, mult in reversed(list(enumerate(ch_mult))):
print('upblocks_i',i)
print('upblocks_mult',mult)
out_ch = ch * mult # mult:2 2 2 1;out_ch = ch * mult =
print('out_ch:',out_ch)
for _ in range(num_res_blocks + 1):
self.upblocks.append(ResBlock(
in_ch=chs.pop() + now_ch, out_ch=out_ch, tdim=tdim,
dropout=dropout, attn=(i in attn)))
now_ch = out_ch
if i != 0:
self.upblocks.append(UpSample(now_ch))
assert len(chs) == 0
self.tail = nn.Sequential(
nn.GroupNorm(32, now_ch),
Swish(),
nn.Conv2d(now_ch, 3, 3, stride=1, padding=1)
)
self.initialize()
def initialize(self):
init.xavier_uniform_(self.head.weight)
init.zeros_(self.head.bias)
init.xavier_uniform_(self.tail[-1].weight, gain=1e-5)
init.zeros_(self.tail[-1].bias)
def forward(self, x, t):
# Timestep embedding
# print('t.shape',t.shape) # torch.Size([64])
# print('x.shape', x.shape) # torch.Size([64, 3, 32, 32])
temb = self.time_embedding(t) # (64,512)
# print('temb',temb)
# Downsampling
h = self.head(x) # (64,128,32,32)
hs = [h]
for layer in self.downblocks:
h = layer(h, temb)
hs.append(h)
# Middle
# print('h.shape',h.shape) # torch.Size([64, 256, 4, 4]),尺寸从32x32变为4x4
for layer in self.middleblocks:
h = layer(h, temb)
# print('h.shape', h.shape) # torch.Size([64, 256, 4, 4])
# Upsampling
for layer in self.upblocks:
if isinstance(layer, ResBlock): # isinstance() 函数来判断一个对象是否是一个已知的类型
h = torch.cat([h, hs.pop()], dim=1)
h = layer(h, temb)
# print('h.shape',h.shape) # torch.Size([64, 128, 32, 32])
h = self.tail(h)
# print('h.shape', h.shape) # torch.Size([64, 3, 32, 32])
assert len(hs) == 0
return h # torch.Size([64, 3, 32, 32])
forward()中先使用TimeEmbedding()函数生成时间步。然后将输出的图(64,3,32,32)经过一个head(),即经过卷积改变通道数送入DownBlocks中,DownBlocks经过下采样将尺寸从32x32变为4x4,然后送入Middle,经过Middle处理后送入UpBlocks,UpBlock将尺寸从4x4上采样为32x32,通道数由256变为128,然后经过tail处理使图片通道数从128回到3,即最后返回的尺寸为(64,3,32,32)。
二、结果
Truth:
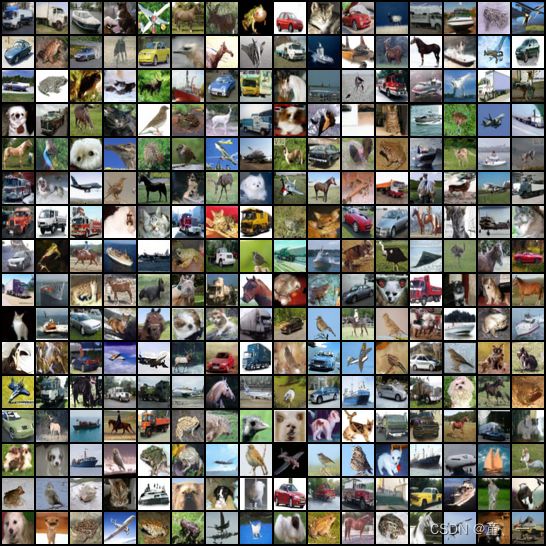
训练结果:
