视觉SLAM十四讲学习笔记——ch5 相机与图像
文章目录
- 5. 相机与模型
-
- 5.1 相机模型
- 5.2 图像
- 5.3 实践
-
- 5.3.1 Open CV的基本使用方法
- 5.3.2 图像去畸变
- 5.4 3D视觉
-
- 5.4.1 双目视觉
- 5.4.2 RGB-D视觉
- 5.5 利用 KDevelop IDE编译器 编译执行文件
5. 相机与模型
5.1 相机模型
理论参考博客:
1.《视觉SLAM十四讲》相机位姿与相机外参的区别与联系
2.《视觉SLAM十四讲》学习笔记:第5讲相机与图像
5.2 图像
理论参考博客:
1.视觉SLAM十四讲学习笔记-第五讲-图像和实践
5.3 实践
5.3.1 Open CV的基本使用方法
例程中演示了对 图像读取,显示,像素遍历,复制,赋值等.
代码及注释如下:
#include 编译运行,执行如下代码,(PS:图片存储位置需要替换!)
./imageBasics/imageBasics /home/lmf37/桌面/slambook2/ch5/imageBasics/ubuntu.png
执行结果如下:
(除了可以看到一张图片,还输出了图片的宽度\高度信息)

5.3.2 图像去畸变
由透镜形状引起的畸变叫做径向畸变,包括桶形畸变和枕形畸变
图像中一条直线,往里弯是桶形,往外弯是枕形【但个人习惯感觉桶形畸变是鼓起来,枕形相反,可不过也不用纠结,桶和枕名字取得很形象,遇到看图就明白了☺】
组装过程导致的成像平面与透镜不平行,带来的是切向畸变
去畸变的思路是这样的:
创建一个和原来一样大的图片区域
遍历这个新图片的所有像素(u v)
通过畸变参数,计算(u,v)处畸变后的坐标
把原图上的畸变后的坐标处的像素值赋值给新图片(涉及到插值)
遍历完成后,新图片就是去畸变的了
编译之后直接运行就好,注意修改代码中的图片路径
(与上边的实验不同,这里使用的路径是在程序里写好的)
代码及注释如下:
#include **但是!!!**,不幸的报错了☹,之前调试是通过的,不知道为什么又报错了,错误如下:
OpenCV Error: Assertion failed (size.width>0 && size.height>0) in imshow, file /home/lmf37/SLAM/opencv-3.4.0/modules/highgui/src/window.cpp, line 331
terminate called after throwing an instance of 'cv::Exception'
what(): /home/lmf37/SLAM/opencv-3.4.0/modules/highgui/src/window.cpp:331: error: (-215) size.width>0 && size.height>0 in function imshow

检查了一下是上面路径写的不对(尴尬,自己强调的事情,转身又掉坑里,不熟练掌握~)
//错误
string image_file = "./home/lmf37/桌面/slambook2/ch5/imageBasics/distorted.png/distorted.png";
//正确
string image_file = "/home/lmf37/桌面/slambook2/ch5/imageBasics/distorted.png";
执行结果如下:
5.4 3D视觉
5.4.1 双目视觉
代码及注释如下:
#include 执行结果如下:注意第一行图是像差图,点击任意键盘按键可显示点云图)
**插播一条小乐趣**
:)这个符号可以显示 :( 可以显示 ,码字の小乐趣
还有这张图有种莫名的美感,!!! 今晩(こんばん)の月(げつ)は绮丽(きれい)ですね :)
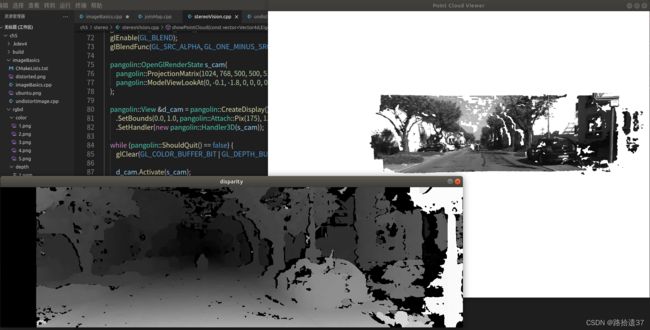
!!! 注意 可以看到相差图中左边有一条黑色,这是因为,左侧相机看到了一部分右侧相机未看到的内容,所以对应的视差是空的.
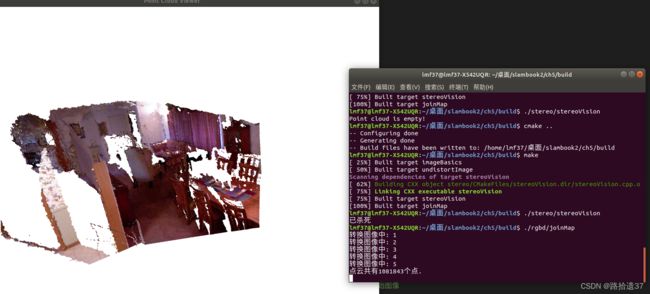
5.4.2 RGB-D视觉
color/有5张RGB图,depth/有5张对应的深度图,pose.txt文件给出了5张图像的相机外参位姿(Twc),为平移向量加旋转四元数:
本节代码主要从完成两件事:
1. 根据相机内参计算一对RGB-D图像对应的点云
2. 根据各张图的相机位姿(即外参),讲点云加一起,组成地图
代码及注释如下:
#include 执行结果如下:
(记得修改文件位置)
PS:可以用鼠标平移旋转点云
5.5 利用 KDevelop IDE编译器 编译执行文件
1.点击构建
 其中运行第一个 open CV 读文件需注意,要将文件名参数,和位置传入,具体如下:
其中运行第一个 open CV 读文件需注意,要将文件名参数,和位置传入,具体如下:
 程序正确运行
程序正确运行

要换不同的程序,可以在运行–>配置启动-->当前启动配置 进行切换即可,然后点击调试即可得到结果
例如切换RGB-D程序