Pytorch中的序列化容器-度消失和梯度爆炸-nn.Sequential-nn.BatchNorm1d-nn.Dropout
Pytorch中的序列化容器-度消失和梯度爆炸-nn.Sequential-nn.BatchNorm1d-nn.Dropout
1. 梯度消失和梯度爆炸
在使用pytorch中的序列化 容器之前,我们先来了解一下常见的梯度消失和梯度爆炸的问题
1.1 梯度消失 【梯度太小,无法进行参数的更新,梯度小到数据类型无法表示时出现NAN】
假设我们有四层极简神经网络:每层只有一个神经元
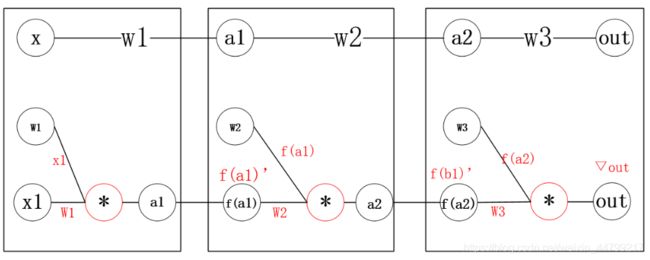
获取w1的梯度有:▽w1 = x1f(a1)’w2f(b1)’w3*▽out
假设我们使用sigmoid激活函数,即f为sigmoid函数,sigmoid的导数如下图
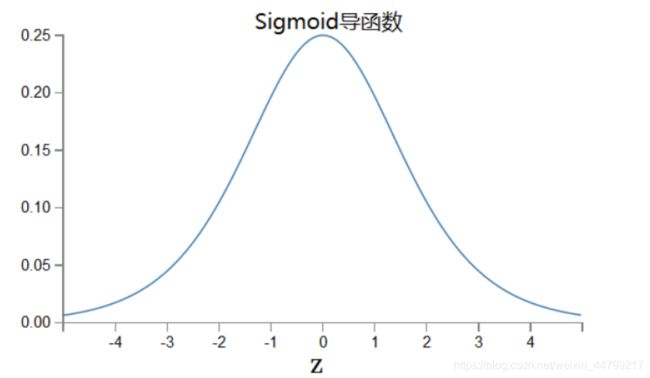
假设每层都取得sigmoid导函数的最大值1/4,那么在反向传播时,X1=0.5,w1=w2=w3=0.5
![]()
当权重初始过小或使用易饱和神经元(sigmoid,tanh,) sigmoid在y=0,1处梯度接近0,而无法更新参数,时神经网络在反向传播时也会呈现指数倍缩小,产生“消失”现象。
1.2 梯度爆炸 【梯度太大,大到数据类型无法表示,出现NAN】
假设X2=2,w1=w2=w3=2
![]()
当权重初始过大时,梯度神经网络在反向传播时也会呈现指数倍放大,产生“爆炸”现象。
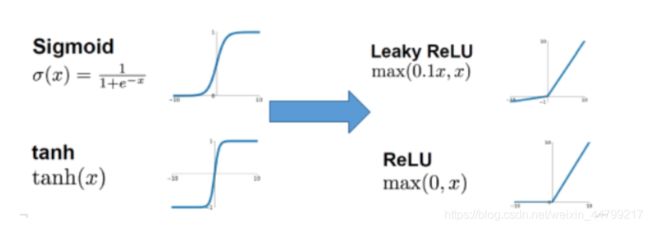
1.3 解决梯度消失或者梯度爆炸的经验 【1.使用更加容易计算梯度的激活函数 2.使用改进的优化算法 3.使用batch Normalization】
-
替换易训练神经元
-
改进梯度优化算法:使用adam等算法
-
使用batch normalization
2. nn.Sequential
nn.Sequential是一个有序的容器,其中传入的是构造器类(各种用来处理input的类),最终input会被Sequential中的构造器类依次执行
例如:
layer = nn.Sequential(
nn.Linear(input_dim, n_hidden_1),
nn.ReLU(True), #inplace=False 是否对输入进行就地修改,默认为False
nn.Linear(n_hidden_1, n_hidden_2),
nn.ReLU(True),
nn.Linear(n_hidden_2, output_dim) # 最后一层不需要添加激活函数
)在上述过程中,可以直接调用layer(x),得到输出
x的被执行顺序就是Sequential中定义的顺序:
-
被隐层1执行,形状变为[batch_size,n_hidden_1]
-
被relu执行,形状不变
-
被隐层2执行,形状变为[batch_size,n_hidden_2]
-
被relu执行,形状不变
-
被最后一层执行,形状变为[batch_size,output_dim]
3. nn.BatchNorm1d 【加速模型的训练,把参数进行规范化的处理,让参数计算的梯度不会太小】
batch normalization 翻译成中文就是批规范化,即在每个batch训练的过程中,对参数进行归一化的处理,从而达到加快训练速度的效果。
以sigmoid激活函数为例,他在反向传播的过程中,在值为0,1的时候,梯度接近0,导致参数被更新的幅度很小,训练速度慢。但是如果对数据进行归一化之后,就会尽可能的把数据拉倒[0-1]的范围,从而让参数更新的幅度变大,提高训练的速度。
batchNorm一般会放到激活函数之后,即对输入进行激活处理之后再进入batchNorm
layer = nn.Sequential(
nn.Linear(input_dim, n_hidden_1),
nn.ReLU(True),
nn.BatchNorm1d(n_hidden_1)
nn.Linear(n_hidden_1, n_hidden_2),
nn.ReLU(True),
nn.BatchNorm1d(n_hidden_2)
nn.Linear(n_hidden_2, output_dim)
)4. nn.Dropout
dropout在前面已经介绍过,可以理解为对参数的随机失活
-
增加模型的稳健性
-
可以解决过拟合的问题(增加模型的泛化能力)
-
可以理解为训练后的模型是多个模型的组合之后的结果,类似随机森林。
layer = nn.Sequential(
nn.Linear(input_dim, n_hidden_1),
nn.ReLU(True),
nn.BatchNorm1d(n_hidden_1)
nn.Dropout(0.3) #0.3 为dropout的比例,默认值为0.5
nn.Linear(n_hidden_1, n_hidden_2),
nn.ReLU(True),
nn.BatchNorm1d(n_hidden_2)
nn.Dropout(0.3)
nn.Linear(n_hidden_2, output_dim)
)