手把手教你使用tensorrt layer api组装scaled yolov4
概要
经过几年的飞速发展,pytorch已经成为了深度学习研究和开发人员喜欢的深度学习框架, 但作为pytorch推理后端的C++ libtorch推理效率一直不高,很多工程师喜欢通过pytorch–>onnx–>tensorrt实现模型的转换和部署,但让人苦恼的是,由于pytorch版本的不一致,导致使用torch onnx转换过程总是BUG重重。本博客将讲述一种终极解决方案,即通过python保存pytorch模型参数文件,然后调用tensorrt layer api方式手动组装网络,这样就可避免各种平台版本不一致的问题。并以scaled_yolov4模型为例,讲述这个“踩坑”之旅。
当然,本文也参考了其他开源方案,在此感谢:https://github.com/wang-xinyu/tensorrtx
总体流程
我将模型转换过程分为三个部分,
- 通过python脚本获取模型权重文件;
- 通过onnx模型转换,然后使用Netron工具查看模型结构;
- 通过tensorrt C++ api组装模型;
本文也将通过以上几大部分展开讲解。
模型参数(key-value)获取
模型参数获取的python脚本代码非常简单,其核心功能函数如下,本质上是读取模型参数的键值字典,并记录到文件。
例如,获取scaled_yolov4的脚本如下:
import argparse
import torch
import torch.nn as nn
import models
from models.experimental import attempt_load
from utils.activations import Mish
def get_wts(model, output_ts):
f = open(output_ts, 'w')
f.write('{}\n'.format(len(model.state_dict().keys())))
for k, v in model.state_dict().items():
print(k)
vr = v.reshape(-1).cpu().numpy()
f.write('{} {} '.format(k, len(vr)))
for vv in vr:
f.write(' ')
f.write('%.5e'%float(vv))
f.write('\n')
if __name__ == '__main__':
parser = argparse.ArgumentParser()
parser.add_argument('--weights', type=str, default='', help='weights path')
parser.add_argument('--output', type=str, default='', help='output key value path')
opt = parser.parse_args()
model = attempt_load(opt.weights, map_location=torch.device('cpu')) # load FP32 model
# 把模型中batchnorm层给替换成非并发的
for k, m in model.named_modules():
m._non_persistent_buffers_set = set() # pytorch 1.6.0 compatability
if isinstance(m, models.common.Conv) and isinstance(m.act, models.common.Mish):
m.act = Mish() # assign activation
if isinstance(m, models.common.BottleneckCSP) or isinstance(m, models.common.BottleneckCSP2) \
or isinstance(m, models.common.SPPCSP):
if isinstance(m.bn, nn.SyncBatchNorm):
bn = nn.BatchNorm2d(m.bn.num_features, eps=m.bn.eps, momentum=m.bn.momentum)
bn.training = False
bn._buffers = m.bn._buffers
bn._parameters = m.bn._parameters #不要漏掉了
bn._non_persistent_buffers_set = set()
m.bn = bnx
if isinstance(m.act, models.common.Mish):
m.act = Mish() # assign activation
# if isinstance(m, models.yolo.Detect):
# m.forward = m.forward_export # assign forward (optional)
model.eval()
model.model[-1].export = True # set Detect() layer export=True
get_wts(model, output)
通过以上脚本,最终能够获取到模型的具体参数, 在此需要指出的scaled_yolov4中包含了所以可把SyncBatchNorm层,用于多卡并行训练,但实际部署时候是单卡,所以可把SyncBatchNorm层转成普通batchnorm层,本质上参数都是一样的,只是换了个结构。
通过以上脚本,就能获得如下面所示的模型权重文件:
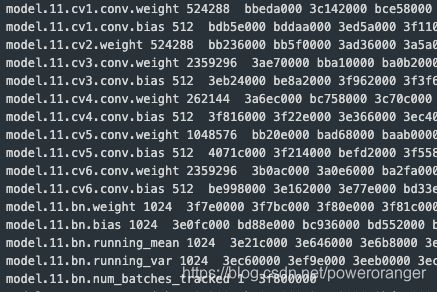
每行表示一个参数,第一个是键名,表示对应的模型中的权重值,第二个是权重参数的数量,最后一个是对应的模型参数。
对于卷积层, weight对应的数量是 kernel_sizekernel_sizeinput_channel*output_channel,例如,第一层卷积核是3x3, 输入是3通道,输出是32通道,那么卷积的size是3x3x3x32, 864
bias对应偏至,和输出通道数相当,是32
转换onnx模型
转换onnx模型的目的是通过Netron工具进行可视化,直观的显示模型结构以及模型参数文件的参数对应位置。
import argparse
import torch
import torch.nn as nn
import models
from models.experimental import attempt_load
from utils.activations import Mish
if __name__ == '__main__':
parser = argparse.ArgumentParser()
parser.add_argument('--weights', type=str, default='/home/lic/git/ScaledYOLOv4-yolov4-large/runs/exp111_yolov4-p5-cylinder/weights/best.pt', help='weights path') # from yolov5/models/
parser.add_argument('--img_size', nargs='+', type=int, default=[416, 768], help='image size') # height, width
opt = parser.parse_args()
opt.img_size *= 2 if len(opt.img_size) == 1 else 1 # expand
print(opt)
# Input
img_size = opt.img_size
img = torch.zeros((opt.batch_size, 3, img_size[1], img_size[0])) # image size(1,3,320,192) iDetection
model = attempt_load(opt.weights, map_location=torch.device('cpu')) # load FP32 model
# Update model
for k, m in model.named_modules():
m._non_persistent_buffers_set = set() # pytorch 1.6.0 compatability
if isinstance(m, models.common.Conv) and isinstance(m.act, models.common.Mish):
m.act = Mish() # assign activation
if isinstance(m, models.common.BottleneckCSP) or isinstance(m, models.common.BottleneckCSP2) \
or isinstance(m, models.common.SPPCSP):
if isinstance(m.bn, nn.SyncBatchNorm):
bn = nn.BatchNorm2d(m.bn.num_features, eps=m.bn.eps, momentum=m.bn.momentum)
bn.training = False
bn._buffers = m.bn._buffers
bn._parameters = m.bn._parameters
bn._non_persistent_buffers_set = set()
m.bn = bn
if isinstance(m.act, models.common.Mish):
m.act = Mish() # assign activation
model.eval()
model.model[-1].export = True # set Detect() layer export=True
try:
import onnx
print('\nStarting ONNX export with onnx %s...' % onnx.__version__)
f = opt.weights.replace('.pt', '.onnx') # filename
torch.onnx.export(model, img, f, verbose=True, opset_version=12, input_names=['images'],
output_names=['output1','output2', 'output3'])
# print(onnx.helper.printable_graph(onnx_model.graph)) # print a human readable model
print('ONNX export success, saved as %s' % f)
except Exception as e:
print('ONNX export failure: %s' % e)
# Finish
print('\nExport complete. Visualize with https://github.com/lutzroeder/netron.')
以上脚本中和保存模型参数一样,替换了SyncBatchNorm中的模型参数。得到了onnx模型,通过Netron工具可视化。
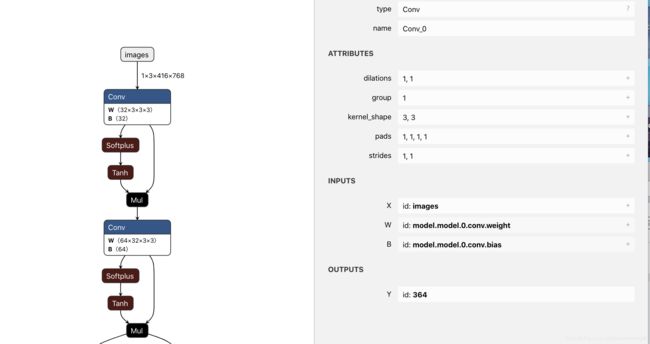
有了模型结构图和对应的参数文件列表,就能开始组装网络了。
模型组装
模型组装流程
1.通过IBuilder创建一个Network
INetworkDefinition* network = builder->createNetworkV2(0U);
2.往网络里添加层,主要是各种add_layer操作
3.标志模型的输出
yolo->getOutput(0)->setName(output_blob_name_.c_str());
network->markOutput(*yolo->getOutput(0));
4.其他设定,包括最大batch size,workspace size, 设定是否半精度标志
5.创建引擎
ICudaEngine* engine = builder->buildEngineWithConfig(*network, *config);
以上流程比较简单,可参考开源工程代码
几个核心层的添加
在谈模型参数之前,需要了解下几个相关的数据结构:
模型权重
//!
//! \class Weights
//!
//! \brief An array of weights used as a layer parameter.
//!
//! The weights are held by reference until the engine has been built. Therefore the data referenced
//! by \p values field should be preserved until the build is complete.
//!
class Weights
{
public:
DataType type; //!< The type of the weights. 参数数据类型
const void* values; //!< The weight values, in a contiguous array. 模型参数
int64_t count; //!< The number of weights in the array. 参数数量
};
//!
//! \enum DataType
//! \brief The type of weights and tensors.
//! 数据类型
enum class DataType : int
{
kFLOAT = 0, //!< FP32 format.
kHALF = 1, //!< FP16 format.
kINT8 = 2, //!< quantized INT8 format.
kINT32 = 3, //!< INT32 format.
kBOOL = 4 //!< BOOL format.
};
//!
//! \class Dims
//! \brief Structure to define the dimensions of a tensor.
//! 向量的维度描述
//!
//! \note: Currently the following formats are supported for layer inputs and outputs:
//! * zero or more index dimensions followed by one channel and two spatial dimensions (e.g. CHW)
//! * one time series dimension followed by one index dimension followed by one channel dimension (i.e. TNC)
//!
//! TensorRT can also return an invalid dims structure. This structure is represented by nbDims == -1
//! and d[i] == 0 for all d.
//!
class Dims
{
public:
static const int MAX_DIMS = 8; //!< The maximum number of dimensions supported for a tensor.
int s; //!< The number of dimensions. 维度数量
int d[MAX_DIMS]; //!< The extent of each dimension. 每个维度的d
TRT_DEPRECATED DimensionType type[MAX_DIMS]; //!< The type of each dimension.
};
对应的层
1.卷积层 对应的函数接口如下:
//! \brief Add a multi-dimension convolution layer to the network.
//!
//! \param input The input tensor to the convolution. 模型的输入向量
//! \param nbOutputMaps The number of output feature maps for the convolution. 输出特征层的数量
//! \param kernelSize The multi-dimensions of the convolution kernel. 模型核的大小
//! \param kernelWeights The kernel weights for the convolution. 模型权重值,使用Weights结构体
//! \param biasWeights The optional bias weights for the convolution. 模型偏至值
//!
//! \see IConvolutionLayer
//!
//! \warning It is an error to specify a wildcard value for the 'C' dimension of the input tensor.
//! \warning Int32 tensors are not valid input tensors.
//! \warning Only 2D or 3D convolution is supported.
//!
//! \return The new convolution layer, or nullptr if it could not be created.
virtual IConvolutionLayer* addConvolutionNd(
ITensor& input, int nbOutputMaps, Dims kernelSize, Weights kernelWeights, Weights biasWeights) TRTNOEXCEPT = 0;
以下是实际添加卷积的两种情况:有bias和无bias;
a.有bias
IConvolutionLayer* conv = network->addConvolutionNd(input, outch, DimsHW{ksize, ksize}, weightMap[weight_name], weightMap[bias_name]);
assert(conv1);
conv->setStrideNd(DimsHW{s, s}); #设置stried
conv->setPaddingNd(DimsHW{p, p}); #设置padding
Dims dims_conv = conv->getOutput(0)->getDimensions();
LOG(INFO)<<"conv outputdims "<b.无bias
std::string weight_name = "model."+to_string(major_idx)+sub_module_name+".weight";
LOG(INFO) << "load conv weight from "<addConvolutionNd(input, outch, DimsHW{ksize, ksize}, weightMap[weight_name], emptywts);
添加完网络层之后,就可以利用返回的层指针,获取该层的输出ITensor,作为后续层的输入,这样,一层一层叠加起来完成网络搭建。
- BatchNorm层
TensortRT中并没有直接的BatchNorm层,该层实际上是通过转换系数依托Scaled层完成。关于数学推导的部分可参考链接:https://blog.csdn.net/github_28260175/article/details/103515033。
BatchNorm一定要注意eps这个系数的设定和网络保持一致,例如开源工程里的yolov3-spp采用的1e-5, 此处使用的是1e-3。
std::string lname = "model."+to_string(major_idx)+".bn";
LOG(INFO) << "load batchnorm from "<(malloc(sizeof(float) * len));
for (int i = 0; i < len; i++) {
scval[i] = gamma[i] / sqrt(var[i] + eps);
}
Weights scale{DataType::kFLOAT, scval, len};
float *shval = reinterpret_cast(malloc(sizeof(float) * len));
for (int i = 0; i < len; i++) {
shval[i] = beta[i] - mean[i] * gamma[i] / sqrt(var[i] + eps);
}
Weights shift{DataType::kFLOAT, shval, len};
float *pval = reinterpret_cast(malloc(sizeof(float) * len));
for (int i = 0; i < len; i++) {
pval[i] = 1.0;
}
Weights power{DataType::kFLOAT, pval, len};
weightMap[lname + ".scale"] = scale;
weightMap[lname + ".shift"] = shift;
weightMap[lname + ".power"] = power;
IScaleLayer* scale_1 = network->addScale(input, ScaleMode::kCHANNEL, shift, scale, power);
- upSample层
同样的,TensorRT里没有直接的上采样层,部署时是通过addDeconvolutionNd完成的。例如工程中常见的两倍上采样就是通过如下代码实现的。
float *deval = reinterpret_cast(malloc(sizeof(float) * channels * 2 * 2));
for (int i = 0; i < channels * 2 * 2; i++) {
deval[i] = 1.0;
}
Weights deconvwts{DataType::kFLOAT, deval, channels * 2 * 2};
Weights emptywts{DataType::kFLOAT, nullptr, 0};
IDeconvolutionLayer* deconv = network->addDeconvolutionNd(input, channels, DimsHW{2, 2}, deconvwts, emptywts);
deconv->setStrideNd(DimsHW{2, 2});
deconv->setNbGroups(channels);
- 插件层
sacaled_yolov4中主要使用了两种类型的插件,一种是Mish激活函数,另一个是输出层。插件开发本身可作为一个独立的问题进行讲解,为不脱离主线,所以本文暂时不展开描述。在此给出一个插件层的添加过程。
auto creator = getPluginRegistry()->getPluginCreator("Mish_TRT", "1"); #获取插件creator
const PluginFieldCollection* pluginData = creator->getFieldNames(); #插件参数
IPluginV2 *pluginObj = creator->createPlugin(mish_name.c_str(), pluginData);#获取插件
ITensor* inputTensors[] = {scale_1->getOutput(0)};#获取插件的输入
auto mish = network->addPluginV2(&inputTensors[0], 1, *pluginObj); #插件添加
assert(mish);
基础层上的模块封装
scaled_yolov4通过配置文件的方式实现模型的组装,具体的配置如下:
# parameters
nc: 80 # number of classes
depth_multiple: 1.0 # model depth multiple
width_multiple: 1.0 # layer channel multiple
# anchors
anchors:
- [13,17, 31,25, 24,51, 61,45] # P3/8
- [48,102, 119,96, 97,189, 217,184] # P4/16
- [171,384, 324,451, 616,618, 800,800] # P5/32
# csp-p5 backbone
backbone:
# [from, number, module, args]
[[-1, 1, Conv, [32, 3, 1]], # 0
[-1, 1, Conv, [64, 3, 2]], # 1-P1/2
[-1, 1, BottleneckCSP, [64]],
[-1, 1, Conv, [128, 3, 2]], # 3-P2/4
[-1, 3, BottleneckCSP, [128]],
[-1, 1, Conv, [256, 3, 2]], # 5-P3/8
[-1, 15, BottleneckCSP, [256]],
[-1, 1, Conv, [512, 3, 2]], # 7-P4/16
[-1, 15, BottleneckCSP, [512]],
[-1, 1, Conv, [1024, 3, 2]], # 9-P5/32
[-1, 7, BottleneckCSP, [1024]], # 10
]
# yolov4-p5 head
# na = len(anchors[0])
head:
[[-1, 1, SPPCSP, [512]], # 11
[-1, 1, Conv, [256, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[8, 1, Conv, [256, 1, 1]], # route backbone P4
[[-1, -2], 1, Concat, [1]],
[-1, 3, BottleneckCSP2, [256]], # 16
[-1, 1, Conv, [128, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[6, 1, Conv, [128, 1, 1]], # route backbone P3
[[-1, -2], 1, Concat, [1]],
[-1, 3, BottleneckCSP2, [128]], # 21
[-1, 1, Conv, [256, 3, 1]],
[-2, 1, Conv, [256, 3, 2]],
[[-1, 16], 1, Concat, [1]], # cat
[-1, 3, BottleneckCSP2, [256]], # 25
[-1, 1, Conv, [512, 3, 1]],
[-2, 1, Conv, [512, 3, 2]],
[[-1, 11], 1, Concat, [1]], # cat
[-1, 3, BottleneckCSP2, [512]], # 29
[-1, 1, Conv, [1024, 3, 1]],
[[22,26,30], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
]
以上模块可分为几个模块,Conv(实际上是卷积+mish激活), BottleneckCSP, SPPCSP, BottleneckCSP2, 本文通过基础层叠加,完成了以上模块的开发,为后续模型组装提供了遍历。
ILayer* convMish(INetworkDefinition *network,
std::map& weightMap,
ITensor& input,
int outch,
int ksize,
int s,
int p,
int module_idx,
std::string sub_module_name);
ILayer* basicBottleNeck(INetworkDefinition *network,
std::map& weightMap,
ITensor& input,
std::vector out_channels,
std::vector ksizes,
std::vector strides,
std::vector paddings,
std::vector module_idxs,
std::vector sub_module_names,
bool short_cut);
ILayer* BottleneckCSP(INetworkDefinition *network,
std::map& weightMap,
ITensor& input,
int channels,
int module_idx,
int module_count);
ILayer* BottleneckCSP2(INetworkDefinition *network,
std::map& weightMap,
ITensor& input,
int channels,
int module_idx,
int module_count);
ILayer* SPPCSP(INetworkDefinition *network,
std::map& weightMap,
ITensor& input,
int channels,
int module_idx);
ILayer* conv(INetworkDefinition *network,
std::map& weightMap,
ITensor& input,
int outch,
int ksize,
int s,
int p,
int major_idx,
std::string sub_module_name,
bool bias,
bool use_conv_prefix=true);
ILayer* bnMish(INetworkDefinition *network,
std::map& weightMap,
ITensor& input,
int major_idx,
float eps);
ILayer* upSample(INetworkDefinition *network,
std::map& weightMap,
ITensor& input,
int channels);
例如Conv对应的convMish层,其代码如下:
ILayer* convMish(INetworkDefinition *network,
std::map& weightMap,
ITensor& input,
int outch,
int ksize,
int s,
int p,
int module_idx,
std::string sub_module_name)
{
using namespace std;
std::string weight_name = "model."+to_string(module_idx)+sub_module_name+".conv.weight";
std::string bias_name = "model."+to_string(module_idx)+sub_module_name+".conv.bias";
std::string mish_name = "mish."+to_string(module_idx)+sub_module_name;
LOG(INFO) << "[1]load conv weight from "<addConvolutionNd(input, outch, DimsHW{ksize, ksize}, weightMap[weight_name], weightMap[bias_name]);
assert(conv1);
conv->setStrideNd(DimsHW{s, s});
conv->setPaddingNd(DimsHW{p, p});
Dims dims_conv = conv->getOutput(0)->getDimensions();
LOG(INFO)<<"conv outputdims "<getOutput(0)->getDimensions().nbDims;
//IScaleLayer* bn1 = addBatchNorm2d(network, weightMap, *conv1->getOutput(0), "module_list." + std::to_string(linx) + ".BatchNorm2d", 1e-4);
auto creator = getPluginRegistry()->getPluginCreator("Mish_TRT", "1");
const PluginFieldCollection* pluginData = creator->getFieldNames();
IPluginV2 *pluginObj = creator->createPlugin(mish_name.c_str(), pluginData);
ITensor* inputTensors[] = {conv->getOutput(0)};
auto mish = network->addPluginV2(&inputTensors[0], 1, *pluginObj);
assert(mish);
Dims dims = mish->getOutput(0)->getDimensions();
LOG(INFO)<<"mish outputdims "<getOutput(0)->getDimensions().nbDims<<": "<addElementWise(*conv->getOutput(0), *mish->getOutput(0), ElementWiseOperation::kPROD);
//LOG(INFO)<<"merge "<getOutput(0)->getDimensions().nbDims;
//assert(merge);
return mish;
}
最终模型的组装
ICudaEngine* ScaledYolov4::BuildEngine(unsigned int maxBatchSize, IBuilder* builder, IBuilderConfig* config, DataType dt)
{
INetworkDefinition* network = builder->createNetworkV2(0U);
// Create input tensor of shape {3, INPUT_H, INPUT_W} with name INPUT_BLOB_NAME
ITensor* data = network->addInput(input_blob_name_.c_str(), dt, Dims4{1, 3, input_height_, input_width_});
assert(data);
string weight_file = model_prefix_ + ".wts";
std::map weightMap = loadWeights(weight_file);
Weights emptywts{DataType::kFLOAT, nullptr, 0};
/* backbone
# [from, number, module, args]
[[-1, 1, Conv, [32, 3, 1]], # 0
[-1, 1, Conv, [64, 3, 2]], # 1-P1/2
[-1, 1, BottleneckCSP, [64]], 2
[-1, 1, Conv, [128, 3, 2]], # 3-P2/4
[-1, 3, BottleneckCSP, [128]], 4
[-1, 1, Conv, [256, 3, 2]], # 5-P3/8
[-1, 15, BottleneckCSP, [256]],6
[-1, 1, Conv, [512, 3, 2]], # 7-P4/16
[-1, 15, BottleneckCSP, [512]],8
[-1, 1, Conv, [1024, 3, 2]], # 9-P5/32
[-1, 7, BottleneckCSP, [1024]],10
]
*/
//oksp module_idx sub_modeul_name
auto lr_0 = convMish(network, weightMap, *data, 32, 3, 1, 1, 0, "");
//oksp module_idx sub_modeul_name
auto lr_1 = convMish(network, weightMap, *lr_0->getOutput(0), 64, 3, 2, 1, 1, "");
//channels module_idx, num_of_basicBottleNeck
auto lr_2 = BottleneckCSP(network, weightMap, *lr_1->getOutput(0), 64, 2, 1);
//oksp module_idx sub_modeul_name subsample
auto lr_3 = convMish(network, weightMap, *lr_2->getOutput(0), 128, 3, 2, 1, 3, "");
//channels module_idx, num_of_basicBottleNeck
auto lr_4 = BottleneckCSP(network, weightMap, *lr_3->getOutput(0), 128, 4, 3);
//oksp module_idx sub_modeul_name subsample
auto lr_5 = convMish(network, weightMap, *lr_4->getOutput(0), 256, 3, 2, 1, 5, "");
//channels module_idx, num_of_basicBottleNeck, 引出一个分支去和下面合并
auto lr_6 = BottleneckCSP(network, weightMap, *lr_5->getOutput(0), 256, 6, 15);
//channels module_idx, num_of_basicBottleNeck
auto lr_7 = convMish(network, weightMap, *lr_6->getOutput(0), 512, 3, 2, 1, 7, "");
//channels module_idx, num_of_basicBottleNeck
auto lr_8 = BottleneckCSP(network, weightMap, *lr_7->getOutput(0), 512, 8, 15);
//channels module_idx, num_of_basicBottleNeck
auto lr_9 = convMish(network, weightMap, *lr_8->getOutput(0), 1024, 3, 2, 1, 9, "");
//channels module_idx, num_of_basicBottleNeck
auto lr_10 = BottleneckCSP(network, weightMap, *lr_9->getOutput(0), 1024, 10, 7);
LOG(INFO)<<"-----------------------------------------------------------------";
LOG(INFO)<<"-----------------------------------------------------------------";
LOG(INFO)<<"------------------------load backbone done-----------------------";
LOG(INFO)<<"-----------------------------------------------------------------";
LOG(INFO)<<"-----------------------------------------------------------------";
//head
//[-1, 1, SPPCSP, [512]], # 11
auto lr_11 = SPPCSP(network, weightMap, *lr_10->getOutput(0), 512, 11);
//[-1, 1, Conv, [256, 1, 1]],
auto lr_12 = convMish(network, weightMap, *lr_11->getOutput(0), 256, 1, 1, 0, 12, "");
//[-1, 1, nn.Upsample, [None, 2, 'nearest']],
auto lr_13 = upSample(network, weightMap, *lr_12->getOutput(0), 256);
//[8, 1, Conv, [256, 1, 1]], # route backbone P4
auto lr_14 = convMish(network, weightMap, *lr_8->getOutput(0), 256, 1, 1, 0, 14, "");
ITensor* concat_tensors1[] = {lr_14->getOutput(0), lr_13->getOutput(0)};
auto lr_15 = network->addConcatenation(concat_tensors1, 2);
//[-1, 1, Conv, [128, 1, 1]],
auto lr_16 = BottleneckCSP2(network, weightMap, *lr_15->getOutput(0), 256, 16, 3);
//[-1, 1, Conv, [128, 1, 1]]
auto lr_17 = convMish(network, weightMap, *lr_16->getOutput(0), 128, 1, 1, 0, 17, "");
//[-1, 1, nn.Upsample, [None, 2, 'nearest']],
auto lr_18 = upSample(network, weightMap, *lr_17->getOutput(0), 128);
auto lr_19 = convMish(network, weightMap, *lr_6->getOutput(0), 128, 1, 1, 0, 19, "");
ITensor* concat_tensors2[] = {lr_19->getOutput(0), lr_18->getOutput(0)};
auto lr_20 = network->addConcatenation(concat_tensors2, 2);
//[-1, 1, Conv, [128, 1, 1]],
auto lr_21 = BottleneckCSP2(network, weightMap, *lr_20->getOutput(0), 128, 21, 3);
auto lr_22 = convMish(network, weightMap, *lr_21->getOutput(0), 256, 3, 1, 1, 22, "");
Dims dims_det1 = lr_22->getOutput(0)->getDimensions();
LOG(INFO)<<"-------------->det1 outputdims "<getOutput(0), 256, 3, 2, 1, 23, "");
ITensor* concat_tensors3[] = {lr_23->getOutput(0), lr_16->getOutput(0)};
auto lr_24 = network->addConcatenation(concat_tensors3, 2);
auto lr_25 = BottleneckCSP2(network, weightMap, *lr_24->getOutput(0), 256, 25, 3);
auto lr_26 = convMish(network, weightMap, *lr_25->getOutput(0), 512, 3, 1, 1, 26, "");
Dims dims_det2 = lr_26->getOutput(0)->getDimensions();
LOG(INFO)<<"-------------->det2 outputdims "<getOutput(0), 512, 3, 2, 1, 27, "");
ITensor* concat_tensors4[] = {lr_27->getOutput(0), lr_11->getOutput(0)};
auto lr_28 = network->addConcatenation(concat_tensors4, 2);
auto lr_29 = BottleneckCSP2(network, weightMap, *lr_28->getOutput(0), 512, 29, 3);
auto lr_30 = convMish(network, weightMap, *lr_29->getOutput(0), 1024, 3, 1, 1, 30, "");
Dims dims_det3 = lr_30->getOutput(0)->getDimensions();
LOG(INFO)<<"-------------->det3 outputdims "<getOutput(0)->setName(output_blob_name_.c_str());
// network->markOutput(*lr_30->getOutput(0));
//output conv
LOG(INFO)<<"-----------------------------------------------------------------";
LOG(INFO)<<"-----------------------------------------------------------------";
LOG(INFO)<<"------------------------load head done---------------------------";
LOG(INFO)<<"-----------------------------------------------------------------";
LOG(INFO)<<"-----------------------------------------------------------------";
int out_channels = num_anchors_*(5+num_classes_);
auto lr_det_conv1 = conv(network, weightMap, *lr_22->getOutput(0), out_channels, 1, 1, 0, 31, ".m.0", true, false);
auto lr_det_conv2 = conv(network, weightMap, *lr_26->getOutput(0), out_channels, 1, 1, 0, 31, ".m.1", true, false);
auto lr_det_conv3 = conv(network, weightMap, *lr_30->getOutput(0), out_channels, 1, 1, 0, 31, ".m.2", true, false);
// lr_det_conv2->getOutput(0)->setName(output_blob_name_.c_str());
// network->markOutput(*lr_det_conv2->getOutput(0));
auto creator = getPluginRegistry()->getPluginCreator("ScaledYoloLayer_TRT", "1");
const PluginFieldCollection* pluginData = creator->getFieldNames();
IPluginV2 *pluginObj = creator->createPlugin("yololayer", pluginData);
ITensor* inputTensors_yolo[] = {lr_det_conv3->getOutput(0), lr_det_conv2->getOutput(0), lr_det_conv1->getOutput(0)};
auto yolo = network->addPluginV2(inputTensors_yolo, 3, *pluginObj);
//yolo->getOutput(0)->setName(output_blob_name_.c_str());
//network->markOutput(*yolo->getOutput(0));
// Build engine
builder->setMaxBatchSize(maxBatchSize);
config->setMaxWorkspaceSize(16 * (1 << 20)); // 16MB
if(use_fp16_){
config->setFlag(BuilderFlag::kFP16);
}
std::cout << "Building engine, please wait for a while..." << std::endl;
ICudaEngine* engine = builder->buildEngineWithConfig(*network, *config);
std::cout << "Build engine successfully!" << std::endl;
// Don't need the network any more
network->destroy();
// Release host memory
for (auto& mem : weightMap)
{
free((void*) (mem.second.values));
}
return engine;
}
调试技巧
模型转换过程不会是一次成功的,会遇到各种问题,一个保险的做法是固化scaled_yolov4 pytorch模型和tensorrt版本模型的输入,进行逐层输出比对校准,例如我的做法是这样的:
在pytorch版本中嵌入了如下代码,保存固定图片输入的每层输出:
def forward_once(self, x, profile=False):
y, dt = [], [] # outputs
i = 0
for m in self.model:
if m.f != -1: # if not from previous layer
x = y[m.f] if isinstance(m.f, int) else [x if j == -1 else y[j] for j in m.f] # from earlier layers
if profile:
try:
import thop
o = thop.profile(m, inputs=(x,), verbose=False)[0] / 1E9 * 2 # FLOPS
except:
o = 0
t = time_synchronized()
for _ in range(10):
_ = m(x)
dt.append((time_synchronized() - t) * 100)
print('%10.1f%10.0f%10.1fms %-40s' % (o, m.np, dt[-1], m.type))
x = m(x) # run
debug = True #保存每层输出
if debug: #保存每层输出
i += 1
print("output %d"%i)
d = x.detach().cpu().numpy().flatten().reshape(-1,1)
np.savetxt("test_py_output_%d.txt"%i, d, fmt="%.4f")
y.append(x if m.i in self.save else None) # save output
而在tensorrt版本中,注释掉其他代码,仅保存其中当截止到当前层的输出,然后进行比对, 例如我想查看lr2层输出是否和原模型一致,就需要如下做:
auto lr_0 = convMish(network, weightMap, *data, 32, 3, 1, 1, 0, "");
//oksp module_idx sub_modeul_name
auto lr_1 = convMish(network, weightMap, *lr_0->getOutput(0), 64, 3, 2, 1, 1, "");
//channels module_idx, num_of_basicBottleNeck
auto lr_2 = BottleneckCSP(network, weightMap, *lr_1->getOutput(0), 64, 2, 1);
lr_2->getOutput(0)->setName(output_blob_name_.c_str());
lr_2->markOutput(*lr_0->getOutput(0));
写代码保存好输出后,然后写个脚本进行数据比对:
import os
import numpy as np
def read_file(file):
data = []
with open(file, 'r') as f:
lines = f.readlines()
for line in lines:
#print(line)
try:
data.append(float(line.strip()))
except ValueError:
print(line)
return data
def compare_txt(file1, file2):
data1 = read_file(file1)
data2 = read_file(file2)
assert len(data1)==len(data2)
diff_count = 0
for i in range(len(data1)):
d1, d2 = data1[i], data2[i]
if abs(d1-d2) > 0.01:
#print("line %d:%f %f"%(i, d1, d2))
diff_count += 1
return diff_count, len(data1)
if __name__ =="__main__":
d1 = "/trt_output.txt"
d2 = "pytorch_output.txt"
diff_count, total_count = compare_txt(d1, d2)
print("error count %d"%diff_count)
print("total count %d"%total_count)
小结
至此,就基本上pytorch版本scaled_yolov4的tensorrt模型转换过程梳理了一遍,重要的是掌握了其中的开发方法,后续遇到新的问题时能够自己依照这个思路解决。如果点赞数多的话,可以开源。