【算法系列】非线性最小二乘求解-梯度下降法
系列文章目录
·【算法系列】卡尔曼滤波算法
·【算法系列】非线性最小二乘求解-直接求解法
·【算法系列】非线性最小二乘求解-梯度下降法
·【算法系列】非线性最小二乘-高斯牛顿法
·【算法系列】非线性最小二乘-列文伯格马夸尔和狗腿算法
文章目录
系列文章
文章目录
前言
一、梯度下降法(GD)
二、最速下降法(SD)
总结
前言
SLAM问题常规的解决思路有两种,一种是基于滤波器的状态估计,围绕着卡尔曼滤波展开;另一种则是基于图论(因子图)的状态估计,将SLAM问题建模为最小二乘问题,而且一般是非线性最小二乘估计去求解。
非线性最小二乘有多种解法,本篇博客介绍梯度下降法系列求解最小二乘问题。
非线性最小二乘的一般形式如下:
![]()
其中 是非线性函数,
是非线性函数,![]() 表示协方差矩阵
表示协方差矩阵
为了阐述方便,进行如下表示:
![]()
一、梯度下降法(GD)
梯度下降法是使自变量x按一定步长沿梯度的反方向进行调整,对应的函数值就会下降,这样不断调整x,直到函数取值下降到最小为止,以下图进行具体说明。

这里的x是一维变量,梯度可以理解为一阶导数,初值选在x1的位置,此时一阶导数值为负,梯度的反方向为正,所以应该增加x的值,按照步长 调整至x2,依次迭代;当到达x4位置时,一阶导数变为正值,梯度反方向为负,应该减小x的值,反复迭代,假设收敛到了一个最小值x5,算法结束。
调整至x2,依次迭代;当到达x4位置时,一阶导数变为正值,梯度反方向为负,应该减小x的值,反复迭代,假设收敛到了一个最小值x5,算法结束。
算法具体表示如下:
![]()
梯度下降法的原理和实现都很简单,但它的缺点也很明显:
- 对初值敏感。在图中很容易发现,收敛获得的最小值,只是算法以为的最小值,是个局部最小值,而真实的最小值在橙点处,这跟初值的选取有关。
- 步长的选择至关重要。如果步长太小,收敛速度很慢,需要迭代很多次才能到的目标点;如果步长太大,很可能错过目标点,形成在最小值附件来回震荡的情况。
在SLAM中,状态由三维坐标和空间姿态角两部分组成,空间姿态角一般用四元数表示,由于存在内部额外约束,无法进行求导和加法迭代运算,这时就要装换到李代数上进行求导和求和运算。
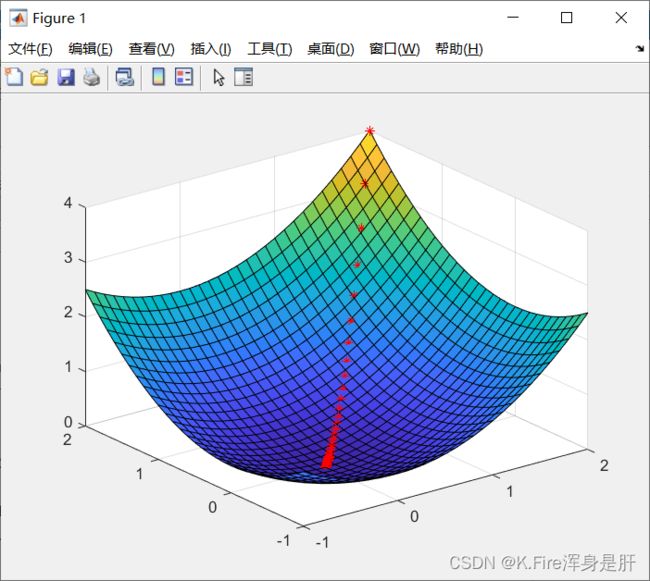
MATLAB实验:
主函数:
% 目标函数为 z=f(x,y)=(x^2+y^2)/2
clear all;
clc;
%构造函数
fun = inline('(x^2+y^2)/2','x','y');
dfunx = inline('x','x','y');
dfuny = inline('y','x','y');
x0 = 2;y0 = 2; %初值
p = 0.1; %步长
[x,y,n,point] = GD(fun,dfunx,dfuny,x0,y0,p); %梯度下降法
%[x,y,n,point] = SD(fun,dfunx,dfuny,x0,y0); %最速下降法
figure
x = -1:0.1:2;
y = x;
[x,y] = meshgrid(x,y);
z = (x.^2+y.^2)/2;
surf(x,y,z) %绘制三维表面图形
% hold on
% plot3(point(:,1),point(:,2),point(:,3),'linewidth',1,'color','black')
hold on
scatter3(point(:,1),point(:,2),point(:,3),'r','*');
GD函数:
%% 梯度下降法
function [x,y,n,point] = GD(fun,dfunx,dfuny,x,y,p)
%输入:fun:函数形式 dfunx(y):梯度(导数) x(y):初值 p:步长
%输出:x(y):计算出的自变量取值 n:迭代次数 point:迭代点集
%初始化
a = feval(fun,x,y);
n=1;
point(n,:) = [x y a];
while (1)
a = feval(fun,x,y); %当前时刻值
x = x - p*(feval(dfunx,x,y)); %下一时刻自变量
y = y - p*(feval(dfuny,x,y)); %下一时刻自变量
b = feval(fun,x,y); %下一时刻值
if(b>=a)
break;
end
n = n+1;
point(n,:) = [x y b];
end实验结果:

二、最速下降法(SD)
最速下降法解决的是梯度下降法中关于步长选取的问题,最速下降法中每次迭代都会找到一个合适的步长 ,使得函数沿当前梯度反方向下降,用数学语言描述如下:
,使得函数沿当前梯度反方向下降,用数学语言描述如下:
![]()
如下图所示:
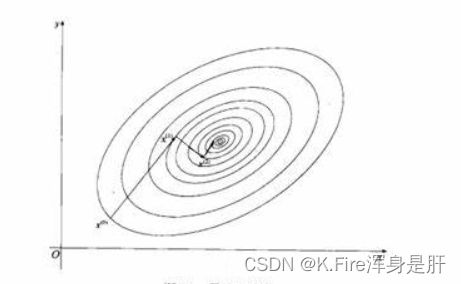
自变量x是二维向量,此时的梯度方向与等高线切线方向垂直,每次都会选取一个合适的步长,使得取值越来越趋近于最小值,每次的步长都不是固定值,保证了函数取值一直是下降的。
MATLAB实验:
主函数:
% 目标函数为 z=f(x,y)=(x^2+y^2)/2
clear all;
clc;
%构造函数
fun = inline('(x^2+y^2)/2','x','y');
dfunx = inline('x','x','y');
dfuny = inline('y','x','y');
x0 = 2;y0 = 2; %初值
p = 0.1; %步长
%[x,y,n,point] = GD(fun,dfunx,dfuny,x0,y0,p); %梯度下降法
[x,y,n,point] = SD(fun,dfunx,dfuny,x0,y0); %最速下降法
figure
x = -1:0.1:2;
y = x;
[x,y] = meshgrid(x,y);
z = (x.^2+y.^2)/2;
surf(x,y,z) %绘制三维表面图形
% hold on
% plot3(point(:,1),point(:,2),point(:,3),'linewidth',1,'color','black')
hold on
scatter3(point(:,1),point(:,2),point(:,3),'r','*');
SD函数:
%% 梯度下降法
function [x,y,n,point] = SD(fun,dfunx,dfuny,x,y)
%输入:fun:函数形式 dfunx(y):梯度(导数) x(y):初值
%输出:x(y):计算出的自变量取值 n:迭代次数 point:迭代点集
%初始化
a = feval(fun,x,y);
n=1;
point(n,:) = [x y a];
p=0.01:0.01:0.1; %步长范围
while (1)
[m,i]=min(x - p*(feval(dfunx,x,y))); %求解合适的步长
a = feval(fun,x,y); %当前时刻值
x = x - p(i)*(feval(dfunx,x,y)); %下一时刻自变量
y = y - p(i)*(feval(dfuny,x,y)); %下一时刻自变量
b = feval(fun,x,y); %下一时刻值
if(b>=a)
break;
end
n = n+1;
point(n,:) = [x y b];
end
实验结果:
总结
虽然最速下降法解决了步长选取的问题,但是在实际使用中,不可避免的会出现初值选取不合适导致获得局部最小值的问题,接下来将介绍高斯-牛顿的方法、裂纹伯格-马夸尔的方法及其变种。
实际应用中应对这几种方法灵活选择。