李沐动手学深度学习笔记---AlexNet
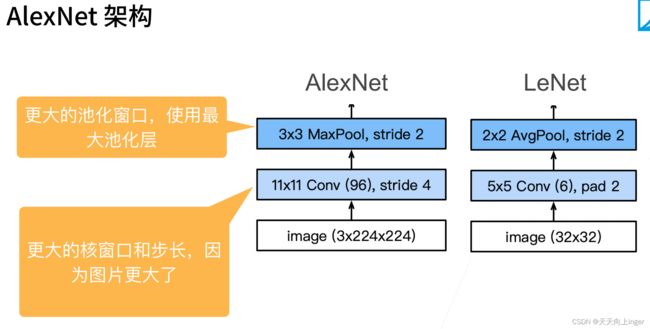
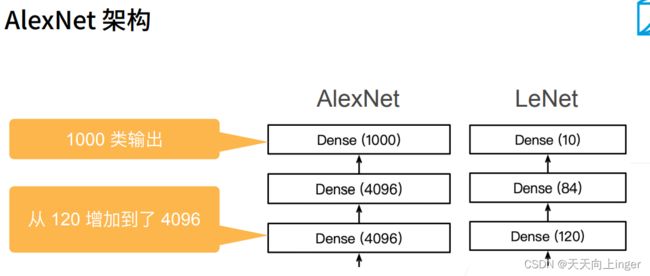
简介:更深更大的LeNet
主要改进为:丢弃法Dropout、Relu、MaxPooling;激活函数从sigmoid变成了Relu;隐藏全连接层后加入丢弃层;数据增强
架构:

总体架构:

代码实现:
import torch
from torch import nn
from d2l import torch as d2l
net=nn.Sequential(
# 这⾥,我们使⽤⼀个11*11的更⼤窗⼝来捕捉对象。
# 同时,步幅为4,以减少输出的⾼度和宽度。
# 另外,输出通道的数⽬远⼤于LeNet
nn.Conv2d(1,96,kernel_size=11,stride=4,padding=1),nn.ReLU(),
nn.MaxPool2d(kernel_size=3,stride=2),
# 减⼩卷积窗⼝,使⽤填充为2来使得输⼊与输出的⾼和宽⼀致,且增⼤输出通道
nn.Conv2d(96,256,kernel_size=5,padding=2),nn.ReLU(),
nn.MaxPool2d(kernel_size=3,padding=2),
# 使⽤三个连续的卷积层和较⼩的卷积窗⼝。
# 除了最后的卷积层,输出通道的数量进⼀步增加。
# 在前两个卷积层之后,汇聚层不⽤于减少输⼊的⾼度和宽度
nn.Conv2d(256,384,kernel_size=3,padding=1),nn.ReLU(),
nn.Conv2d(384,384,kernel_size=3,padding=1),nn.ReLU(),
nn.Conv2d(384,256,kernel_size=3,padding=1),nn.ReLU(),
nn.MaxPool2d(kernel_size=3,stride=2),nn.Flatten(),
# 这⾥,全连接层的输出数量是LeNet中的好⼏倍。使⽤dropout层来减轻过拟合
nn.Linear(6400,4096),nn.ReLU(),nn.Dropout(p=0.5),
nn.Linear(4096,4096),nn.ReLU(),nn.Dropout(p=0.5),
# 最后是输出层。由于这⾥使⽤Fashion-MNIST,所以⽤类别数为10,⽽⾮论⽂中的1000
nn.Linear(4096,10)
)
X=torch.randn(1,1,224,224)
for layer in net:
X=layer(X)
#首先用layer.__class__将实例变量指向类,然后再去调用__name__类属性
print(layer.__class__.__name__,'output shape:\t',X.shape)
# 读取数据集
batch_size = 128
train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size, resize=224)
#训练AlexNet
lr,num_epochs=0.01,10 #可调lr
d2l.train_ch6(net, train_iter, test_iter, num_epochs, lr, d2l.try_gpu())
train_ch6():
#为了使⽤GPU,我们还需要⼀点⼩改动。与 3.6节中定义的train_epoch_ch3不同,在进⾏正向和反向传播
#之前,我们需要将每⼀⼩批量数据移动到我们指定的设备(例如GPU)上。
def train_ch6(net,train_iter,test_iter,num_epochs,lr,device):
def init_weights(m):
if type(m)==nn.Linear or type(m)==nn.Conv2d:
nn.init.xavier_uniform_(m.weight)
net.apply(init_weights)
print('training on',device)
net.to(device)#区别
optimizer=torch.optim.SGD(net.parameters(),lr=lr)#SGD随机梯度下降算法
loss=nn.CrossEntropyLoss()#交叉熵
animator=d2l.Animator(xlabel='epoch',xlim=[1,num_epochs],
legend=['train loss','train acc','test acc'])
timer,num_batches=d2l.Timer(),len(train_iter)
for epoch in range(num_epochs):
metric=d2l.Accumulator(3)
net.train()
for i,(X,y) in enumerate(train_iter):
timer.start()
optimizer.zero_grad()
X,y=X.to(device),y.to(device)#将输入和输出挪到GPU上,主要区别
y_hat=net(X)#前向操作
l=loss(y_hat,y)
l.backward()
optimizer.step()#迭代
with torch.no_grad():
metric.add(l * X.shape[0], d2l.accuracy(y_hat, y), X.shape[0])
timer.stop()
train_l = metric[0] / metric[2]
train_acc = metric[1] / metric[2]
if (i + 1) % (num_batches // 5) == 0 or i == num_batches - 1:
animator.add(epoch + (i + 1) / num_batches,
(train_l, train_acc, None))
test_acc = evaluate_accuracy_gpu(net, test_iter)
animator.add(epoch + 1, (None, None, test_acc))
print(f'loss {train_l:.3f}, train acc {train_acc:.3f}, '
f'test acc {test_acc:.3f}')
print(f'{metric[2] * num_epochs / timer.sum():.1f} examples/sec '
f'on {str(device)}')