OpenCV-Python相机标定:Camera Calibration
1.概述:
在使用相机拍照片时,大多数人会考虑拍的好不好看,关注相机中物体坐标的并不多,但是对于地信学科来说,如果能从照片中获取物体的真实位置,对地理信息获取大有帮助,在这里面,十分关键的一步就是相机标定。
相机标定的基本原理也是相对简单的,看官网中的一个示意图,很容易发现,物点P(Xw,Yw,Zw),像点(u,v)和相机点三点在同一条线上(红线),如果知道多对物点和像点,画出他们的连线,找到的焦点就是相机的位置,同时还可以根据这些线的走向解算相机的旋转角,旋转角和坐标偏移共同构成了相机的外参。(实际上,这里的像点并不是照片中物体的坐标,而是相机中感光片上的坐标,他们的转化需要一定的几何变化)

2.基本假设
影响上面相机外参精度的变量有很多,例如镜头畸变,像主点跟感光片的相对位置等等,这些可以归纳为相机的内参。
在此仅使用OpenCV-Python中的函数做一个小实验,拍摄工具是手机,所以也不方便找到这些参数,因此不考虑内参的影响,假设相机内参是完美的,即没有畸变和偏移。
所以它的内参矩阵可以假设为下面的样子,27是我手机拍照时显示的焦距,单位mm,8.17是用宽度的像素个数除以照片宽度得到的,也就是1mm有多少像素:

假设没有畸变,因此畸变参数全部设置为0
![]()
参考了这个文章;
相机标定——相机的内参矩阵IntrinsicMatrix参数解释_人工智睿的博客-CSDN博客_相机内参矩阵
3.坐标获取
基于上面的假设,问题就简单多了,需要的数据只有物点坐标,像点坐标,在这里拍摄了一个照片,用来提供上面的数据,A4纸上画的是X轴和Y轴,电脑屏幕的棋盘作为Z轴刻度,电脑屏幕棋盘的第一条线距离桌面8.5cm。
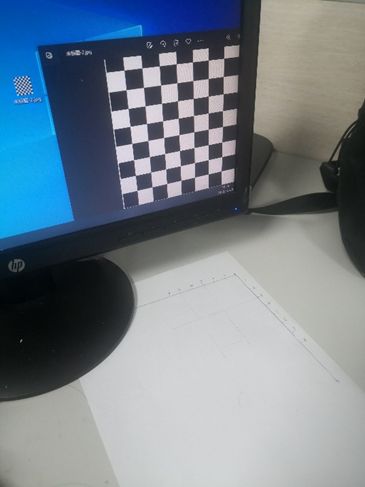
下面的代码可帮助获取屏幕坐标,在输入真实坐标后,保存这些坐标
import numpy as np
import cv2 as cv
import glob
#定义两个列表,realcoo存储真实坐标,imacoo存储相片坐标
imacoo=[]
realcoo=[]
#OpenCV点击相片的事件相应函数,左键双击提示输入三维坐标,右键双击保存输入的点为numpy的一种文件格式,便于后续使用
def GetCoordinate(event,x,y,flags,param):
#event判断事件类型,右键双击保存为cooimfoText.npz文件
if event == cv.EVENT_RBUTTONDBLCLK:
np.savez('cooimfoText.npz', imacoo=imacoo, realcoo=realcoo)
#如果是左键双击,就键入物体的真实坐标
if event == cv.EVENT_LBUTTONDBLCLK:
print(x,y)
strcoo = input("请输入三维坐标,以逗号隔开")
coo = strcoo.split(',')
realcoo.append((float(coo[0]), float(coo[1]), float(coo[2])))
imacoo.append((x,y))
#打开图像
img = cv.imread("IMG_20221028_151422.jpg")
width,height=img.shape[:2]
#由于手机分辨率太高了,电脑屏幕显示不下,所以缩放一下
imgresize = cv.resize(img,(int(0.2*height), int(0.2*width)), interpolation = cv.INTER_CUBIC)
#窗口命名
cv.namedWindow('room')
#事件绑定
cv.setMouseCallback('room',GetCoordinate)
#打开图像,开始采集点坐标
cv.imshow('room',imgresize)
key=cv.waitKey(0)4. 外参解算
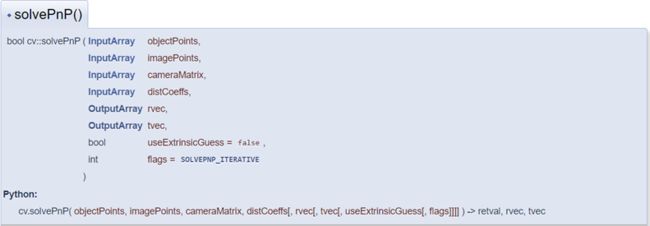
解算主要用到了OpenCV的这个函数solvePnP(),看下图它的参数,第一个就是上面的物点坐标,第二个是像点坐标,第三个是相机参数A(在上面已经做了假设),第四个是畸变参数(假设为[0,0,0,0,0]),它的返回值就是rvec:相机旋转参数,tvec相机平移参数
使用下面的代码完成解算过程
import numpy as np
import cv2 as cv
#根据假设,定义的相机内部参数和畸变参数
M = np.asarray([[27 * 8.17, 0, 0], [0, 27 * 8.17, 0], [0, 0, 1]], dtype=float)
C = np.asarray([0, 0, 0, 0, 0], dtype=float)
#打开刚获取到的坐标文件
with np.load('cooimfoText.npz') as X:
imacoo = X['imacoo']
realcoo = X['realcoo']
#屏幕坐标转迪卡尔坐标
for i in range(0,len(imacoo)):
imacoo[i][1]=793-imacoo[i][1]
#转化为浮点型
realcoo = realcoo.astype(np.float32)
imacoo = imacoo.astype(np.float32)
#解算相机外参
retval, rvec, tvec = cv.solvePnP(realcoo, imacoo,M, C)
#打印结果
print("解算结果:",retval)
print("旋转角度:",rvec)
print("偏移距离:",tvec)
输出结果为:
比对照片,可以大概判断结果结果基本符合实际情况,距离大致相同。
5.问题解决
问题1:solvePnP()与calibrateCamera()的异同?
calibrateCamera():从校准模式的多个视图中查找相机的内在和外在参数。
solvePnP():从 3D-2D 点对应中查找对象姿势,它需要的参数更简单,需要二维和三维对应的点,同时要输入相机的内参。
在最初的计算中,计划使用的是calibrateCamera()函数,它的介绍是从校准模式的多个视图中查找相机的内在和外在参数。在计算是,它频繁报错,后来查看官网的介绍,发现更适合使用solvePnP()计算本例。
![]()
他们需要输入的类型都是浮点型的坐标,如果输入int会报错:objectPoints should contain vector of vectors of points of type Point3f in function
问题2:相机内参矩阵矩阵对结果影响有多大?
按照经验来看,手机相机畸变参数并不大,因此假设为0也对结果影响较小,但是焦距和像主点偏移就不一定了,在完成本例时,由于开始对概念不清晰,试了多次焦距参数,略微改变都会带来很大的结果差别,因此要注意这个参数尽量精细。
