卷积神经网络(CNN)原理详解
卷积神经网络(CNN)原理详解
1. 卷积神经网络的组成
- 定义
- 卷积神经网络由一个或多个卷积层、池化层以及全连接层等组成。与其他深度学习结构相比,卷积神经网络在图像等方面能够给出更好的结果。这一模型也可以使用反向传播算法进行训练。相比较其他浅层或深度神经网络,卷积神经网络需要考量的参数更少,使之成为一种颇具吸引力的深度学习结构。
我们来看一下卷积网络的整体结构什么样子。
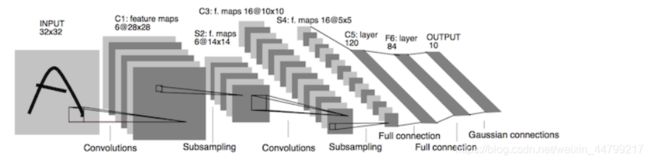
其中包含了几个主要结构
- 卷积层(Convolutions)
- 池化层(Subsampling)
- 全连接层(Full connection)
- 激活函数
2. 卷积层
- 目的
- 卷积运算的目的是提取输入的不同特征,某些卷积层可能只能提取一些低级的特征如边缘、线条和角等层级,更多层的网路能从低级特征中迭代提取更复杂的特征。
- 参数:
- size:卷积核/过滤器大小,选择有1 1, 3 3, 5 * 5(为什么是奇数个)
- padding:零填充,Valid 与Same
- stride:步长,通常默认为1
- 计算公式
2.1 卷积运算过程
对于之前介绍的卷积运算过程,我们用一张动图来表示更好理解些。一下计算中,假设图片长宽相等,设为N
- 一个步长,3 X 3 卷积核运算
假设是一张5 X 5 的单通道图片,通过使用3 X 3 大小的卷积核运算得到一个 3 X 3大小的运算结果(图片像素数值仅供参考)
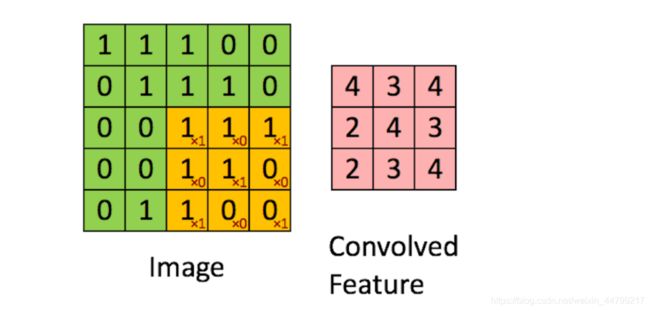
我们会发现进行卷积之后的图片变小了,假设N为图片大小,F为卷积核大小
相当于N - F + 1 = 5 - 3 + 1 = 3N−F+1=5−3+1=3
如果我们换一个卷积核大小或者加入很多层卷积之后,图像可能最后就变成了1 X 1 大小,这不是我们希望看到的结果。并且对于原始图片当中的边缘像素来说,只计算了一遍,二对于中间的像素会有很多次过滤器与之计算,这样导致对边缘信息的丢失。
- 缺点
- 图像变小
- 边缘信息丢失
3. padding-零填充
零填充:在图片像素的最外层加上若干层0值,若一层,记做p =1。
- 为什么增加的是0?
因为0在权重乘积和运算中对最终结果不造成影响,也就避免了图片增加了额外的干扰信息。
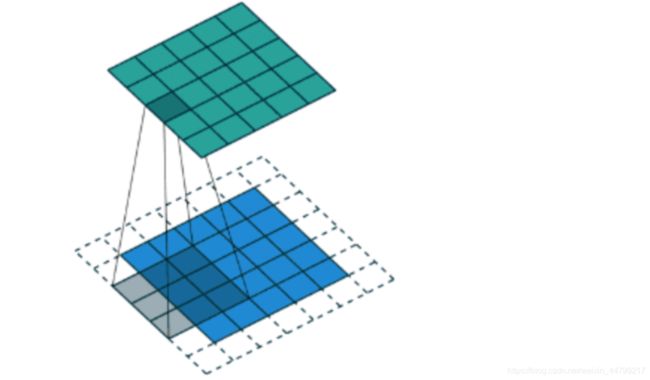
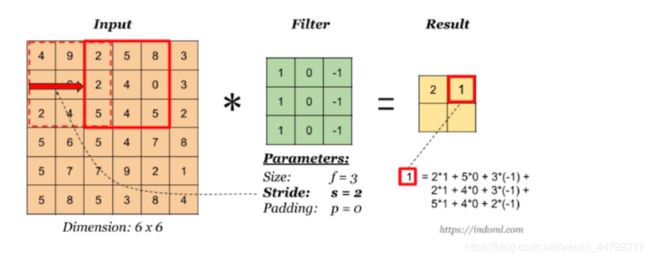
这张图中,还是移动一个像素,并且外面增加了一层0。那么最终计算结果我们可以这样用公式来计算:
5 + 2 * p - 3 + 1 = 5
P为1,那么最终特征结果为5。实际上我们可以填充更多的像素,假设为2层,则
5 + 2 * 2 - 3 + 1 = 7,这样得到的观察特征大小比之前图片大小还大。所以我们对于零填充会有一些选择,该填充多少?
3.1 Valid and Same卷积
有两种两种形式,所以为了避免上述情况,大家选择都是Same这种填充卷积计算方式
- Valid :不填充,也就是最终大小为
- (N - F + 1) * (N - F + 1)
- Same:输出大小与原图大小一致,那么 N变成了N + 2P
- (N + 2P - F + 1) * (N + 2P - F + 1)
那也就意味着,之前大小与之后的大小一样,得出下面的等式
(N + 2P - F + 1) = N
![]()
所以当知道了卷积核的大小之后,就可以得出要填充多少层像素。
3.2 奇数维度的过滤器
通过上面的式子,如果F不是奇数而是偶数个,那么最终计算结果不是一个整数,造成0.5,1.5.....这种情况,这样填充不均匀,所以也就是为什么卷积核默认都去使用奇数维度大小
-
1 x 1,3 x 3, 5 x 5,7 x 7
-
另一个解释角度
- 奇数维度的过滤器有中心,便于指出过滤器的位置
当然这个都是一些假设的原因,最终原因还是在F对于计算结果的影响。所以通常选择奇数维度的过滤器,是大家约定成俗的结果,可能也是基于大量实验奇数能得出更好的结果。
4. stride-步长
以上例子中我们看到的都是每次移动一个像素步长的结果,如果将这个步长修改为2,3,那结果如何?
这样如果以原来的计算公式,那么结果
N + 2P - F + 1 = 6 + 0 -3 +1 = 4
但是移动2个像素才得出一个结果,所以公式变为
(N+2P−F)/2+1=1.5+1=2.5,如果相除不是整数的时候,向下取整,为2。这里并没有加上零填充。
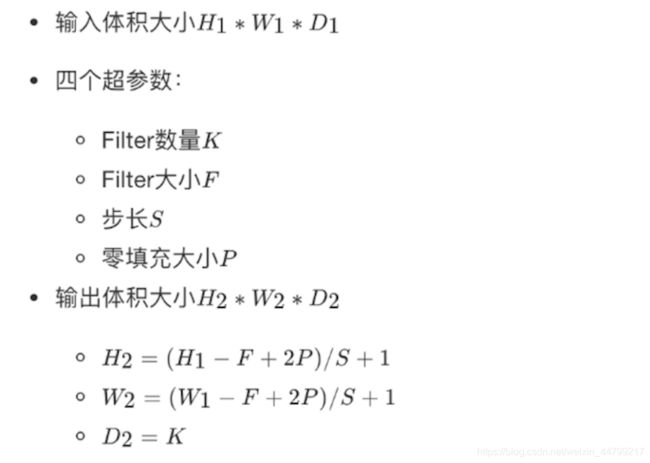
所以最终的公式就为:
对于输入图片大小为N,过滤器大小为F,步长为S,零填充为P,
![]() ,
,![]()
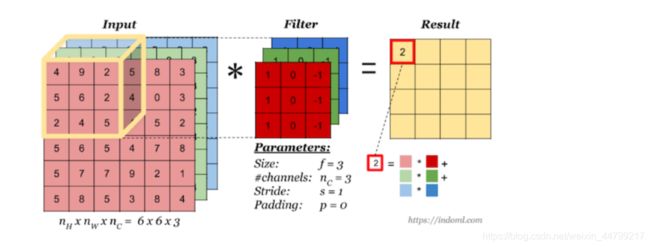
5. 多通道卷积
当输入有多个通道(channel)时(例如图片可以有 RGB 三个通道),卷积核需要拥有相同的channel数,每个卷积核 channel 与输入层的对应 channel 进行卷积,将每个 channel 的卷积结果按位相加得到最终的 Feature Map。
5.1 多卷积核(多个Filter)
当有多个卷积核时,可以学习到多种不同的特征,对应产生包含多个 channel 的 Feature Map, 例如上图有两个 filter,所以 output 有两个 channel。这里的多少个卷积核也可理解为多少个神经元。
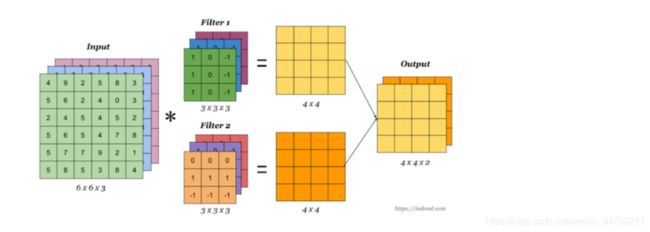
相当于我们把多个功能的卷积核的计算结果放在一起,能够检测到图片中不同的特征(边缘检测)
6. 卷积总结
我们来通过一个例子看一下结算结果,以及参数的计算
- 假设我们有10 个Filter,每个Filter3 X 3 X 3(计算RGB图片),并且只有一层卷积,那么参数有多少?
计算:每个Filter参数个数为:3 3 3 + 1 bias = 28个权重参数,总共28 * 10 = 280个参数,即使图片任意大小,我们这层的参数也就这么多。
- 假设一张200 200 3的图片,进行刚才的FIlter,步长为1,最终为了保证最后输出的大小为200 * 200,需要设置多大的零填充
![]()
![]()
卷积层充当特征提取的角色,但是并没有减少图片的特征数量,在最后的全连接层依然面临大量的参数,所以需要池化层进行特征数量的减少
7. 池化层(Pooling) 【减少图片的特征数量,避免全连接层参数过多】
池化层主要对卷积层学习到的特征图进行亚采样(subsampling)处理,主要由两种
- 最大池化:Max Pooling,取窗口内的最大值作为输出
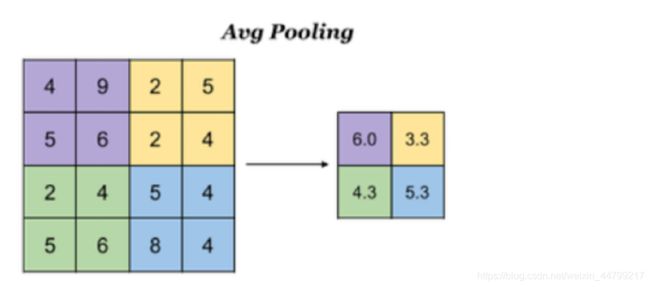
- 平均池化:Avg Pooling,取窗口内的所有值的均值作为输出
意义在于:
- 降低了后续网络层的输入维度,缩减模型大小,提高计算速度
- 提高了Feature Map 的鲁棒性,防止过拟合
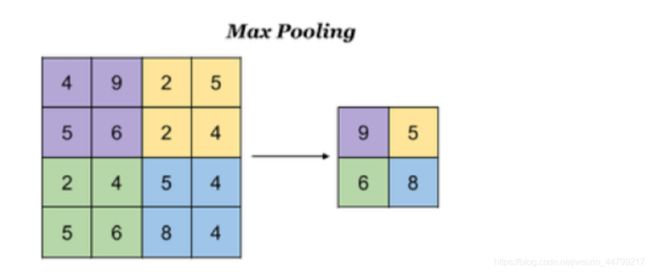
对于一个输入的图片,我们使用一个区域大小为2 2,步长为2的参数进行求最大值操作。同样池化也有一组参数,f, s,得到2 2的大小。当然如果我们调整这个超参数,比如说3 * 3,那么结果就不一样了,通常选择默认都是f = 2 * 2, s = 2
池化超参数特点:不需要进行学习,不像卷积通过梯度下降进行更新。
如果是平均池化则:
8. 全连接层
卷积层+激活层+池化层可以看成是CNN的特征学习/特征提取层,而学习到的特征(Feature Map)最终应用于模型任务(分类、回归):
- 先对所有 Feature Map 进行扁平化(flatten, 即 reshape 成 1 x N 向量)
- 再接一个或多个全连接层,进行模型学习
