Bilinear CNN PyTorch版代码解读
本文是个人对Bilinear CNN的代码的理解,代码来自于Hao Zhang,适用PyTorch 0.3.0,骨干网选择的是vgg16-pool5,应用于CUB200-2011数据集。
1.文件结构
文件clone之后,文件目录如下:
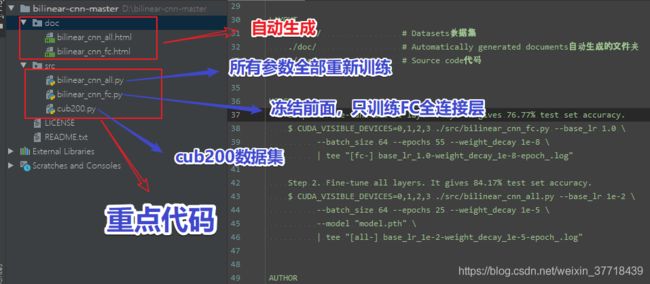
2 bilinear_cnn_all.py
所有的权重参数都要重新微调
#!/usr/bin/env python
# -*- coding: utf-8 -*-
"""Fine-tune all layers for bilinear CNN.
Usage:
CUDA_VISIBLE_DEVICES=0,1,2,3 ./src/bilinear_cnn_all.py --base_lr 0.05 \
--batch_size 64 --epochs 100 --weight_decay 5e-4
"""
import os
import torch
import torchvision
import cub200
torch.manual_seed(0)#为CPU设置种子用于生成随机数,
torch.cuda.manual_seed_all(0))#为当前GPU设置随机种子
__all__ = ['BCNN', 'BCNNManager']
__author__ = 'Hao Zhang'
__copyright__ = '2018 LAMDA'
__date__ = '2018-01-09'
__email__ = '[email protected]'
__license__ = 'CC BY-SA 3.0'
__status__ = 'Development'
__updated__ = '2018-01-13'
__version__ = '1.2'
#在BCNNManager中调用
class BCNN(torch.nn.Module):
"""B-CNN for CUB200.
使用VGG-16,VGG-16的结构如https://blog.csdn.net/weixin_37718439/article/details/104440048
The B-CNN model is illustrated as follows.
conv1^2 (64) -> pool1 -> conv2^2 (128) -> pool2 -> conv3^3 (256) -> pool3
-> conv4^3 (512) -> pool4 -> conv5^3 (512) -> bilinear pooling
-> sqrt-normalize -> L2-normalize -> fc (200).
The network accepts a 3*448*448 input, and the pool5 activation has shape
512*28*28 since we down-sample 5 times.
Attributes:
features, torch.nn.Module: Convolution and pooling layers.
fc, torch.nn.Module: 200.
"""
def __init__(self):
"""Declare all needed layers."""
torch.nn.Module.__init__(self)
# Convolution and pooling layers of VGG-16.
self.features = torchvision.models.vgg16(pretrained=False).features#只导入网络结构,不导入参数:
self.features = torch.nn.Sequential(*list(self.features.children())
[:-1]) # Remove pool5.#https://www.cnblogs.com/lfri/p/10493408.html
# Linear classifier.
self.fc = torch.nn.Linear(512**2, 200)#线性FC层,进行分类
def forward(self, X):
"""Forward pass of the network.
Args:
X, torch.autograd.Variable of shape N*3*448*448.
Returns:
Score, torch.autograd.Variable of shape N*200.
"""
N = X.size()[0]#N是batch size
assert X.size() == (N, 3, 448, 448)#x是(batchsize,channel,448,448)
X = self.features(X)#x经过vgg-pool5提取得到features
assert X.size() == (N, 512, 28, 28)#提取后为(batchsize,512,28,28)
X = X.view(N, 512, 28**2)#整形为(batchsize,512,28X28)
X = torch.bmm(X, torch.transpose(X, 1, 2)) / (28**2) # Bilinear
#开始X为 (N,512,28**2)
#torch.transpose(X, 1, 2)把X转置为 (N,28**2,512)
# torch.bmm(X, torch.transpose(X, 1, 2))乘的结果为 (N,512,512)
assert X.size() == (N, 512, 512)#是否为 (N, 512, 512)
X = X.view(N, 512**2)#调整为(N, 512**2)
X = torch.sqrt(X + 1e-5)
X = torch.nn.functional.normalize(X)#normalize
X = self.fc(X)#全连接,输出为(N, 200)
assert X.size() == (N, 200)#验证时候为(N, 200)
return X#输出全连接处理后的结果
#在main()调用,加载数据
class BCNNManager(object):
"""Manager class to train bilinear CNN.
Attributes:
_options: Hyperparameters.
_path: Useful paths.
_net: Bilinear CNN.
_criterion: Cross-entropy loss.
_solver: SGD with momentum.
_scheduler: Reduce learning rate by a fator of 0.1 when plateau.
_train_loader: Training data.
_test_loader: Testing data.
"""
def __init__(self, options, path):
"""Prepare the network, criterion, solver, and data.
Args:
options, dict: Hyperparameters.
"""
print('Prepare the network and data.')
self._options = options
self._path = path#模型地址
# Network.
self._net = torch.nn.DataParallel(BCNN()).cuda()#调用上面的BCNN,多GPU训练
#加载权重
# Load the model from disk.
self._net.load_state_dict(torch.load(self._path['model']))#加载网络模型参数
print(self._net)
# Criterion.选用损失函数
self._criterion = torch.nn.CrossEntropyLoss().cuda()#使用交叉熵损失函数
# Solver.优化器
self._solver = torch.optim.SGD(
self._net.parameters(), lr=self._options['base_lr'],#基础学习率
momentum=0.9, weight_decay=self._options['weight_decay'])#动量 ,权重衰减
#学习率调度
self._scheduler = torch.optim.lr_scheduler.ReduceLROnPlateau(#网络的评价指标不在提升的时候,可以通过降低网络的学习率来提高网络性能
self._solver, mode='max', factor=0.1, patience=3, verbose=True,
threshold=1e-4)
#max表示当监控量停止上升的时候,学习率将减小,默认为min
#factor学习率每次降低多少,new_lr = old_lr * factor
#patience=3,容忍网路的性能不提升的次数,高于这个次数就降低学习率
#verbose(bool) - 如果为True,则为每次更新向stdout输出一条消息。 默认值:False
#threshold(float) - 测量新最佳值的阈值,仅关注重大变化。 默认值:1e-4
#训练图像增广操作
train_transforms = torchvision.transforms.Compose([
torchvision.transforms.Resize(size=448), # Let smaller edge match调整大小
torchvision.transforms.RandomHorizontalFlip(),#依概率p垂直翻
torchvision.transforms.RandomCrop(size=448),#随机裁剪
torchvision.transforms.ToTensor(),#
torchvision.transforms.Normalize(mean=(0.485, 0.456, 0.406),
std=(0.229, 0.224, 0.225))
])
#测试图像增广操作
test_transforms = torchvision.transforms.Compose([
torchvision.transforms.Resize(size=448),
torchvision.transforms.CenterCrop(size=448),
torchvision.transforms.ToTensor(),
torchvision.transforms.Normalize(mean=(0.485, 0.456, 0.406),
std=(0.229, 0.224, 0.225))
])
#训练数据
train_data = cub200.CUB200(
root=self._path['cub200'], train=True, download=True,
transform=train_transforms)
#test数据
test_data = cub200.CUB200(
root=self._path['cub200'], train=False, download=True,
transform=test_transforms)
#加载train数据
self._train_loader = torch.utils.data.DataLoader(
train_data, batch_size=self._options['batch_size'],
shuffle=True, num_workers=4, pin_memory=True)
#加载test数据
self._test_loader = torch.utils.data.DataLoader(
test_data, batch_size=16,
shuffle=False, num_workers=4, pin_memory=True)
#在main()中被调用
def train(self):
"""Train the network."""
print('Training.')
best_acc = 0.0
best_epoch = None
print('Epoch\tTrain loss\tTrain acc\tTest acc')
for t in range(self._options['epochs']):
epoch_loss = []
num_correct = 0#记录检测正确共多少张图片
num_total = 0#记录检测过多少张图片
for X, y in self._train_loader:
# Data.
X = torch.autograd.Variable(X.cuda())
y = torch.autograd.Variable(y.cuda(async=True))
# Clear the existing gradients.
self._solver.zero_grad()#梯度置0
# Forward pass.
score = self._net(X)#经过改进后的vgg16输出
loss = self._criterion(score, y)#交叉熵损失
epoch_loss.append(loss.data[0])
# Prediction.
_, prediction = torch.max(score.data, 1)#按维度dim 返回最大值
num_total += y.size(0)#记录检测过多少张图片
num_correct += torch.sum(prediction == y.data)#预测和真实数据y相等,则为正确,计算预测正确的数量
# Backward pass.
loss.backward()
self._solver.step()
train_acc = 100 * num_correct / num_total#train正确百分比
test_acc = self._accuracy(self._test_loader)#调用下面的_accuracy函数,计算出当前的test的精度acc
self._scheduler.step(test_acc)#scheduler.step()是对lr进行调整,依据当前的acc来调整学习率
if test_acc > best_acc:#保留最佳的acc
best_acc = test_acc
best_epoch = t + 1
print('*', end='')
print('%d\t%4.3f\t\t%4.2f%%\t\t%4.2f%%' %
(t+1, sum(epoch_loss) / len(epoch_loss), train_acc, test_acc))
print('Best at epoch %d, test accuaray %f' % (best_epoch, best_acc))
#计算当前的精度
def _accuracy(self, data_loader):
"""Compute the train/test accuracy.
Args:
data_loader: Train/Test DataLoader.
Returns:
Train/Test accuracy in percentage.
"""
self._net.train(False)#网络置为测试模式
num_correct = 0#记录测试正确的图像的数目
num_total = 0#记录测试过的图像的数目
for X, y in data_loader:
# Data.加载数据
X = torch.autograd.Variable(X.cuda())
y = torch.autograd.Variable(y.cuda(async=True))
# Prediction.
score = self._net(X)
_, prediction = torch.max(score.data, 1)
num_total += y.size(0)#测试过的图像+1
num_correct += torch.sum(prediction == y.data).item()#预测正确的图像+1
self._net.train(True) # Set the model to training phase 置为训练模式
return 100 * num_correct / num_total#返回测试结果,测试正确率
#没有调用,注释掉了,平均数,和方差计算Compute mean and variance for training data.
#求数据集每个通道的mean和std
def getStat(self):
"""Get the mean and std value for a certain dataset."""
print('Compute mean and variance for training data.')
#加载数据
train_data = cub200.CUB200(
root=self._path['cub200'], train=True,
transform=torchvision.transforms.ToTensor(), download=True)
train_loader = torch.utils.data.DataLoader(
train_data, batch_size=1, shuffle=False, num_workers=4,
pin_memory=True)
mean = torch.zeros(3)#初始化为3维全0的tensor
std = torch.zeros(3)#初始化为3维全0的tensor
#所有图像按照通道求其mean和std
for X, _ in train_loader:
for d in range(3):
mean[d] += X[:, d, :, :].mean()
std[d] += X[:, d, :, :].std()
mean.div_(len(train_data))
std.div_(len(train_data))
print(mean)
print(std)
def main():
"""The main function."""
import argparse
#输入参数
parser = argparse.ArgumentParser(
description='Train bilinear CNN on CUB200.')
parser.add_argument('--base_lr', dest='base_lr', type=float, required=True,
help='Base learning rate for training.')
parser.add_argument('--batch_size', dest='batch_size', type=int,
required=True, help='Batch size.')
parser.add_argument('--epochs', dest='epochs', type=int, required=True,
help='Epochs for training.')
parser.add_argument('--weight_decay', dest='weight_decay', type=float,
required=True, help='Weight decay.')
parser.add_argument('--model', dest='model', type=str, required=True,
help='Model for fine-tuning.')
# 解析输入的参数
args = parser.parse_args()
#判断输入的参数是否合适
if args.base_lr <= 0:
raise AttributeError('--base_lr parameter must >0.')
if args.batch_size <= 0:
raise AttributeError('--batch_size parameter must >0.')
if args.epochs < 0:
raise AttributeError('--epochs parameter must >=0.')
if args.weight_decay <= 0:
raise AttributeError('--weight_decay parameter must >0.')
#合适的参数加入options
options = {
'base_lr': args.base_lr,
'batch_size': args.batch_size,
'epochs': args.epochs,
'weight_decay': args.weight_decay,
}
project_root = os.popen('pwd').read().strip()
path = {
'cub200': os.path.join(project_root, 'data/cub200'),
'model': os.path.join(project_root, 'model', args.model),
}
for d in path:
if d == 'model':
assert os.path.isfile(path[d])#用于判断对象是否为一个文件
else:
assert os.path.isdir(path[d])#用于判断对象是否为一个目录
#加载数据
manager = BCNNManager(options, path)
# manager.getStat()
#进行训练
manager.train()
if __name__ == '__main__':
main()
3.bilinear_cnn_fc.py
只需要微调FC部分的参数,前面的参数都冻结
#!/usr/bin/env python
# -*- coding: utf-8 -*-
"""Fine-tune the fc layer only for bilinear CNN.
Usage:
CUDA_VISIBLE_DEVICES=0,1,2,3 ./src/bilinear_cnn_fc.py --base_lr 0.05 \
--batch_size 64 --epochs 100 --weight_decay 5e-4
"""
import os
import torch
import torchvision
import cub200
torch.manual_seed(0)
torch.cuda.manual_seed_all(0)
__all__ = ['BCNN', 'BCNNManager']
__author__ = 'Hao Zhang'
__copyright__ = '2018 LAMDA'
__date__ = '2018-01-09'
__email__ = '[email protected]'
__license__ = 'CC BY-SA 3.0'
__status__ = 'Development'
__updated__ = '2018-01-13'
__version__ = '1.2'
class BCNN(torch.nn.Module):
"""B-CNN for CUB200.
The B-CNN model is illustrated as follows.
conv1^2 (64) -> pool1 -> conv2^2 (128) -> pool2 -> conv3^3 (256) -> pool3
-> conv4^3 (512) -> pool4 -> conv5^3 (512) -> bilinear pooling
-> sqrt-normalize -> L2-normalize -> fc (200).
The network accepts a 3*448*448 input, and the pool5 activation has shape
512*28*28 since we down-sample 5 times.
Attributes:
features, torch.nn.Module: Convolution and pooling layers.
fc, torch.nn.Module: 200.
"""
def __init__(self):
"""Declare all needed layers."""
torch.nn.Module.__init__(self)
# Convolution and pooling layers of VGG-16.
self.features = torchvision.models.vgg16(pretrained=True).features
self.features = torch.nn.Sequential(*list(self.features.children())
[:-1]) # Remove pool5.
# Linear classifier.
self.fc = torch.nn.Linear(512**2, 200)
#冻结freeze FC层之前的所有层,只训练FC层
# Freeze all previous layers.
for param in self.features.parameters():
param.requires_grad = False
# Initialize the fc layers.
torch.nn.init.kaiming_normal(self.fc.weight.data)#何凯明初始化
if self.fc.bias is not None:
torch.nn.init.constant(self.fc.bias.data, val=0)#fc层的bias进行constant初始化
def forward(self, X):
"""Forward pass of the network.
Args:
X, torch.autograd.Variable of shape N*3*448*448.
Returns:
Score, torch.autograd.Variable of shape N*200.
"""
N = X.size()[0]
assert X.size() == (N, 3, 448, 448)
X = self.features(X)
assert X.size() == (N, 512, 28, 28)
X = X.view(N, 512, 28**2)
X = torch.bmm(X, torch.transpose(X, 1, 2)) / (28**2) # Bilinear 计算
assert X.size() == (N, 512, 512)
X = X.view(N, 512**2)
X = torch.sqrt(X + 1e-5)
X = torch.nn.functional.normalize(X)
X = self.fc(X)
assert X.size() == (N, 200)
return X
class BCNNManager(object):
"""Manager class to train bilinear CNN.
Attributes:
_options: Hyperparameters.
_path: Useful paths.
_net: Bilinear CNN.
_criterion: Cross-entropy loss.
_solver: SGD with momentum.
_scheduler: Reduce learning rate by a fator of 0.1 when plateau.
_train_loader: Training data.
_test_loader: Testing data.
"""
def __init__(self, options, path):
"""Prepare the network, criterion, solver, and data.
Args:
options, dict: Hyperparameters.
"""
print('Prepare the network and data.')
self._options = options
self._path = path
# Network.
self._net = torch.nn.DataParallel(BCNN()).cuda()
print(self._net)
# Criterion.
self._criterion = torch.nn.CrossEntropyLoss().cuda()#选用交叉熵损失函数计算loss
# Solver.
self._solver = torch.optim.SGD( #选择SGD优化器
self._net.module.fc.parameters(), lr=self._options['base_lr'],
momentum=0.9, weight_decay=self._options['weight_decay'])
self._scheduler = torch.optim.lr_scheduler.ReduceLROnPlateau( #动态优学习率
self._solver, mode='max', factor=0.1, patience=3, verbose=True,
threshold=1e-4)
#train数据增广
train_transforms = torchvision.transforms.Compose([
torchvision.transforms.Resize(size=448), # Let smaller edge match
torchvision.transforms.RandomHorizontalFlip(),
torchvision.transforms.RandomCrop(size=448),
torchvision.transforms.ToTensor(),
torchvision.transforms.Normalize(mean=(0.485, 0.456, 0.406),
std=(0.229, 0.224, 0.225))
])
#test数据增广
test_transforms = torchvision.transforms.Compose([
torchvision.transforms.Resize(size=448),
torchvision.transforms.CenterCrop(size=448),
torchvision.transforms.ToTensor(),
torchvision.transforms.Normalize(mean=(0.485, 0.456, 0.406),
std=(0.229, 0.224, 0.225))
])
#加载train和test数据集
train_data = cub200.CUB200(
root=self._path['cub200'], train=True, download=True,
transform=train_transforms)
test_data = cub200.CUB200(
root=self._path['cub200'], train=False, download=True,
transform=test_transforms)
self._train_loader = torch.utils.data.DataLoader(
train_data, batch_size=self._options['batch_size'],
shuffle=True, num_workers=4, pin_memory=True)
self._test_loader = torch.utils.data.DataLoader(
test_data, batch_size=16,
shuffle=False, num_workers=4, pin_memory=True)
def train(self):
"""Train the network."""
print('Training.')
best_acc = 0.0
best_epoch = None
print('Epoch\tTrain loss\tTrain acc\tTest acc')
for t in range(self._options['epochs']):
epoch_loss = []
num_correct = 0
num_total = 0
for X, y in self._train_loader:
# Data.
X = torch.autograd.Variable(X.cuda())
y = torch.autograd.Variable(y.cuda(async=True))
# Clear the existing gradients.
self._solver.zero_grad()
# Forward pass.
score = self._net(X)
loss = self._criterion(score, y)
epoch_loss.append(loss.data[0])
# Prediction.
_, prediction = torch.max(score.data, 1)
num_total += y.size(0)
num_correct += torch.sum(prediction == y.data)
# Backward pass.
loss.backward()
self._solver.step()
train_acc = 100 * num_correct / num_total
test_acc = self._accuracy(self._test_loader)#调用下面的_accuracy函数,计算出当前的test的精度acc
self._scheduler.step(test_acc)#scheduler.step()是对lr进行调整,依据当前的acc来调整学习率
if test_acc > best_acc:
best_acc = test_acc
best_epoch = t + 1
print('*', end='')
# Save model onto disk.
torch.save(self._net.state_dict(),
os.path.join(self._path['model'],
'vgg_16_epoch_%d.pth' % (t + 1)))
print('%d\t%4.3f\t\t%4.2f%%\t\t%4.2f%%' %
(t+1, sum(epoch_loss) / len(epoch_loss), train_acc, test_acc))
print('Best at epoch %d, test accuaray %f' % (best_epoch, best_acc))
def _accuracy(self, data_loader):
"""Compute the train/test accuracy.
Args:
data_loader: Train/Test DataLoader.
Returns:
Train/Test accuracy in percentage.
"""
self._net.train(False)
num_correct = 0
num_total = 0
for X, y in data_loader:
# Data.
X = torch.autograd.Variable(X.cuda())
y = torch.autograd.Variable(y.cuda(async=True))
# Prediction.
score = self._net(X)
_, prediction = torch.max(score.data, 1)
num_total += y.size(0)
num_correct += torch.sum(prediction == y.data).item()
self._net.train(True) # Set the model to training phase
return 100 * num_correct / num_total
def getStat(self):
"""Get the mean and std value for a certain dataset."""
print('Compute mean and variance for training data.')
train_data = cub200.CUB200(
root=self._path['cub200'], train=True,
transform=torchvision.transforms.ToTensor(), download=True)
train_loader = torch.utils.data.DataLoader(
train_data, batch_size=1, shuffle=False, num_workers=4,
pin_memory=True)
mean = torch.zeros(3)
std = torch.zeros(3)
for X, _ in train_loader:
for d in range(3):
mean[d] += X[:, d, :, :].mean()
std[d] += X[:, d, :, :].std()
mean.div_(len(train_data))
std.div_(len(train_data))
print(mean)
print(std)
def main():
"""The main function."""
import argparse
parser = argparse.ArgumentParser(
description='Train bilinear CNN on CUB200.')
parser.add_argument('--base_lr', dest='base_lr', type=float, required=True,
help='Base learning rate for training.')
parser.add_argument('--batch_size', dest='batch_size', type=int,
required=True, help='Batch size.')
parser.add_argument('--epochs', dest='epochs', type=int,
required=True, help='Epochs for training.')
parser.add_argument('--weight_decay', dest='weight_decay', type=float,
required=True, help='Weight decay.')
args = parser.parse_args()
if args.base_lr <= 0:
raise AttributeError('--base_lr parameter must >0.')
if args.batch_size <= 0:
raise AttributeError('--batch_size parameter must >0.')
if args.epochs < 0:
raise AttributeError('--epochs parameter must >=0.')
if args.weight_decay <= 0:
raise AttributeError('--weight_decay parameter must >0.')
options = {
'base_lr': args.base_lr,
'batch_size': args.batch_size,
'epochs': args.epochs,
'weight_decay': args.weight_decay,
}
project_root = os.popen('pwd').read().strip()
path = {
'cub200': os.path.join(project_root, 'data/cub200'),
'model': os.path.join(project_root, 'model'),
}
for d in path:
assert os.path.isdir(path[d])
manager = BCNNManager(options, path)
# manager.getStat()
manager.train()
if __name__ == '__main__':
main()
4.cub200.py
# -*- coding: utf-8 -*
"""This module is served as torchvision.datasets to load CUB200-2011.
CUB200-2011 dataset has 11,788 images of 200 bird species. The project page
is as follows.
http://www.vision.caltech.edu/visipedia/CUB-200-2011.html
- Images are contained in the directory data/cub200/raw/images/,
with 200 subdirectories.
- Format of images.txt:
- Format of train_test_split.txt:
- Format of classes.txt:
- Format of iamge_class_labels.txt:
This file is modified from:
https://github.com/vishwakftw/vision.
"""
import os
import pickle
import numpy as np
import PIL.Image
import torch
__all__ = ['CUB200']
__author__ = 'Hao Zhang'
__copyright__ = '2018 LAMDA'
__date__ = '2018-01-09'
__email__ = '[email protected]'
__license__ = 'CC BY-SA 3.0'
__status__ = 'Development'
__updated__ = '2018-01-10'
__version__ = '1.0'
class CUB200(torch.utils.data.Dataset):
"""CUB200 dataset.
Args:
_root, str: Root directory of the dataset.
_train, bool: Load train/test data.
_transform, callable: A function/transform that takes in a PIL.Image
and transforms it.
_target_transform, callable: A function/transform that takes in the
target and transforms it.
_train_data, list of np.ndarray.
_train_labels, list of int.
_test_data, list of np.ndarray.
_test_labels, list of int.
"""
def __init__(self, root, train=True, transform=None, target_transform=None,
download=False):
"""Load the dataset.
Args
root, str: Root directory of the dataset.
train, bool [True]: Load train/test data.
transform, callable [None]: A function/transform that takes in a
PIL.Image and transforms it.
target_transform, callable [None]: A function/transform that takes
in the target and transforms it.
download, bool [False]: If true, downloads the dataset from the
internet and puts it in root directory. If dataset is already
downloaded, it is not downloaded again.
"""
self._root = os.path.expanduser(root) # Replace ~ by the complete dir
self._train = train
self._transform = transform
self._target_transform = target_transform
if self._checkIntegrity():#时候存在文件,是否完整的检验
print('Files already downloaded and verified.')
elif download:#没有下,就去网上下载
url = ('http://www.vision.caltech.edu/visipedia-data/CUB-200-2011/'
'CUB_200_2011.tgz')
self._download(url) #调用下面的_download
self._extract()#调用下面的_extract
else:
raise RuntimeError(
'Dataset not found. You can use download=True to download it.')
# Now load the picked data
# load指定类型的data和labels
if self._train:
self._train_data, self._train_labels = pickle.load(open(
os.path.join(self._root, 'processed/train.pkl'), 'rb'))
assert (len(self._train_data) == 5994 #数据时候完整5994,不够就提示错误
and len(self._train_labels) == 5994)
else:
self._test_data, self._test_labels = pickle.load(open(
os.path.join(self._root, 'processed/test.pkl'), 'rb'))
assert (len(self._test_data) == 5794
and len(self._test_labels) == 5794)
#提取指定index的图像image和对应的标签targets
def __getitem__(self, index):
"""
Args:
index, int: Index.
Returns:
image, PIL.Image: Image of the given index.
target, str: target of the given index.
"""
if self._train:
image, target = self._train_data[index], self._train_labels[index]
else:
image, target = self._test_data[index], self._test_labels[index]
# Doing this so that it is consistent with all other datasets.
image = PIL.Image.fromarray(image)
if self._transform is not None:#图像进行transform处理
image = self._transform(image)
if self._target_transform is not None:#标签进行transform处理
target = self._target_transform(target)
return image, target
def __len__(self):
"""Length of the dataset.
Returns:
length, int: Length of the dataset.
"""
if self._train:
return len(self._train_data)
return len(self._test_data)
def _checkIntegrity(self):
"""Check whether we have already processed the data.
Returns:
flag, bool: True if we have already processed the data.
"""
return (
os.path.isfile(os.path.join(self._root, 'processed/train.pkl'))
and os.path.isfile(os.path.join(self._root, 'processed/test.pkl')))
def _download(self, url):
"""Download and uncompress the tar.gz file from a given URL.
Args:
url, str: URL to be downloaded.
"""
import six.moves
import tarfile
raw_path = os.path.join(self._root, 'raw')
processed_path = os.path.join(self._root, 'processed')
if not os.path.isdir(raw_path):
os.mkdir(raw_path, mode=0o775)
if not os.path.isdir(processed_path):
os.mkdir(processed_path, mode=0x775)
# Downloads file.
fpath = os.path.join(self._root, 'raw/CUB_200_2011.tgz')
try:
print('Downloading ' + url + ' to ' + fpath)
six.moves.urllib.request.urlretrieve(url, fpath)
except six.moves.urllib.error.URLError:
if url[:5] == 'https:':
self._url = self._url.replace('https:', 'http:')
print('Failed download. Trying https -> http instead.')
print('Downloading ' + url + ' to ' + fpath)
six.moves.urllib.request.urlretrieve(url, fpath)
# Extract file.
cwd = os.getcwd()
tar = tarfile.open(fpath, 'r:gz')
os.chdir(os.path.join(self._root, 'raw'))
tar.extractall()
tar.close()
os.chdir(cwd)
def _extract(self):
"""Prepare the data for train/test split and save onto disk."""
image_path = os.path.join(self._root, 'raw/CUB_200_2011/images/')
# Format of images.txt:
id2name = np.genfromtxt(os.path.join(
self._root, 'raw/CUB_200_2011/images.txt'), dtype=str)
# Format of train_test_split.txt:
id2train = np.genfromtxt(os.path.join(
self._root, 'raw/CUB_200_2011/train_test_split.txt'), dtype=int)
train_data = []
train_labels = []
test_data = []
test_labels = []
for id_ in range(id2name.shape[0]):
image = PIL.Image.open(os.path.join(image_path, id2name[id_, 1]))
label = int(id2name[id_, 1][:3]) - 1 # Label starts with 0
# Convert gray scale image to RGB image.
if image.getbands()[0] == 'L':
image = image.convert('RGB')
image_np = np.array(image)
image.close()
if id2train[id_, 1] == 1:
train_data.append(image_np)
train_labels.append(label)
else:
test_data.append(image_np)
test_labels.append(label)
pickle.dump((train_data, train_labels),#反序列化
open(os.path.join(self._root, 'processed/train.pkl'), 'wb'))
pickle.dump((test_data, test_labels),
open(os.path.join(self._root, 'processed/test.pkl'), 'wb'))