通俗易懂的RNN
目录
- 一、什么是RNN
- 二、为什么要发明RNN
- 三、RNN的基础知识
-
- 1、循环核介绍
- 2、循环核按时间步展开
- 3、记忆体
- 4、循环计算层
- 5、TF描述循环计算层
- 二、RNN的补充知识
-
- 1、RNN梯度消失的原因
一、什么是RNN
RNN(Recurrent Neural Network)是一类用于处理序列数据的神经网络。首先我们要明确什么是序列数据,摘取百度百科词条:时间序列数据是指在不同时间点上收集到的数据,这类数据反映了某一事物、现象等随时间的变化状态或程度。这是时间序列数据的定义,当然这里也可以不是时间,比如文字序列,但总归序列数据有一个特点——后面的数据跟前面的数据有关系。
RNN是神经网络的一种,类似的还有深度神经网络DNN,卷积神经网络CNN,生成对抗网络GAN,等等。RNN对具有序列特性的数据非常有效,它能挖掘数据中的时序信息以及语义信息,利用了RNN的这种能力,使深度学习模型在解决语音识别、语言模型、机器翻译以及时序分析等NLP领域的问题时有所突破。
举几个具有序列特性的例子:
- 拿人类的某句话来说,也就是人类的自然语言,是不是符合某个逻辑或规则的字词拼凑排列起来的,这就是符合序列特性。
- 语音,我们发出的声音,每一帧每一帧的衔接起来,才凑成了我们听到的话,这也具有序列特性。
- 股票,随着时间的推移,会产生具有顺序的一系列数字,这些数字也是具有序列特性。
二、为什么要发明RNN
我们先来看一个NLP很常见的问题,命名实体识别,举个例子,现在有两句话:
第一句话:I like eating apple!(我喜欢吃苹果!)
第二句话:The Apple is a great company!(苹果真是一家很棒的公司!)
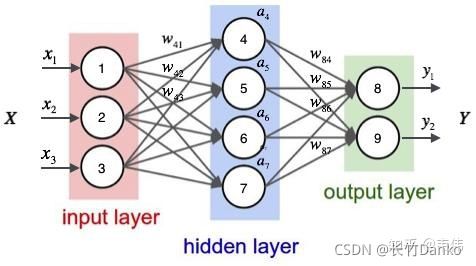
现在的任务是要给apple打Label,我们都知道第一个apple是一种水果,第二个apple是苹果公司,假设我们现在有大量的已经标记好的数据以供训练模型,当我们使用全连接的神经网络时,我们做法是把apple这个单词的特征向量输入到我们的模型中(如下图),在输出结果时,让我们的label里,正确的label概率最大,来训练模型,但我们的语料库中,有的apple的label是水果,有的label是公司,这将导致,模型在训练的过程中,预测的准确程度,取决于训练集中哪个label多一些,这样的模型对于我们来说完全没有作用。问题就出在了我们没有结合上下文去训练模型,而是单独的在训练apple这个单词的label,这也是全连接神经网络模型所不能做到的,于是就有了我们的循环神经网络。
三、RNN的基础知识
1、循环核介绍
循环核具有记忆力,通过不同时刻的参数共享,实现了对时间序列的信息提取
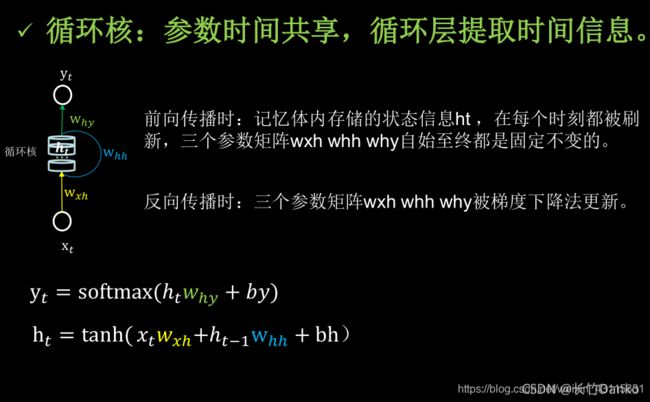
- ht:记忆体内当前时刻存储的状态信息
- xt:当前时刻输入特征
- ht-1:记忆体上一时刻存储的状态信息
- yt:当前时刻循环核的输出特征
2、循环核按时间步展开
按时间步展开,就是把循环核按照时间轴方向展开。每个时刻记忆体状态信息ht被刷新,记忆体周围的参数矩阵wxh、whh和why是固定不变的。要训练优化的就是这些参数矩阵。训练完成后,使用效果最好的参数矩阵,执行前向传播,输出预测结果。循环神经网络,就是借助循环核提取时间特征后,送入全连接网络,实现连续数据的预测。

3、记忆体
循环核按照时间步展开后,可以发现,循环核是由多个记忆体构成,记忆体是循环神经网络储存历史状态信息的载体,每个记忆体都可以设定相应的个数,这个个数决定了记忆体可以存储历史状态信息的能力,记忆体个数越多,训练效果越好,但是由于记忆体的个数决定了参数矩阵的维度,因此记忆体个数越多,需要训练的参数量就越多,所需要消耗的资源就越大,训练时间就越长,因此需酌情评估。图中的例子中记忆体的个数为3,这个记忆体的个数,决定了ht的维度,进一步决定了Wxh、Whh以及Why的维度。
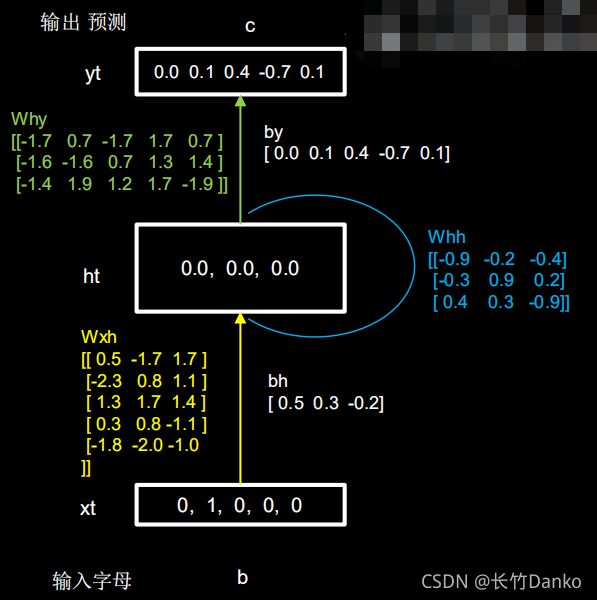
对于记忆体,还有一种更好的理解方式,输入xt+记忆体ht+输出yt这一个结构其实对应的就是全连接神经网络,其中输入层就是输入xt,隐藏层就是记忆体,隐藏层神经元的个数即是记忆体的个数,输出层就是输出yt,具体图示如下:

图中的Wxh维度是3x4,Whh维度是4x4,Why维度是4x2。
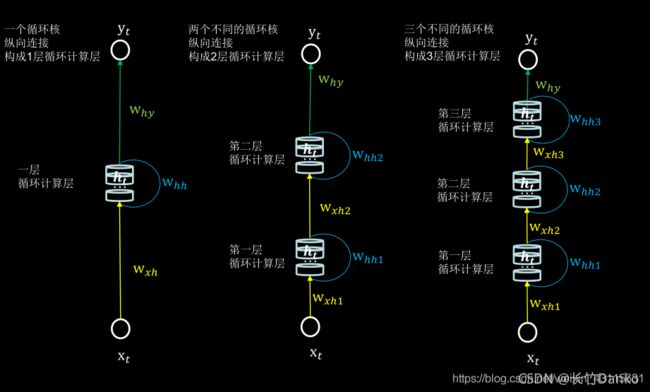
4、循环计算层
每个循环核构成一层循环计算层。循环计算层的层数时是向输出方向增长的。
5、TF描述循环计算层
tf.keras.layers.SimpleRNN(记忆体个数,
activation = '激活函数', # 其中默认为tanh
return_sequences = Ture or False # 是否每个时刻输出ht到下一层,
# 如果不是则仅最后时间步输出ht,False为默认值
)
(1)每个时间步都会输出ht:一般是中间层

(2)仅最后时间步输出ht:一般是输出层

二、RNN的补充知识
1、RNN梯度消失的原因
RNN和DNN梯度消失的原因是不同的,DNN梯度消失及梯度爆炸的原因可见之前的文章,这里我们介绍RNN梯度消失的原因。
RNN结构如图:
【注】:图中的隐藏层标记St与上面图片中的标识ht不同,标识只是用于推导RNN梯度消失的原因,无其他含义。
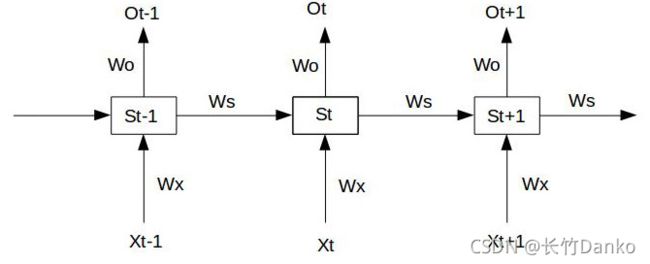
假设我们的时间序列只有三段, [公式] 为给定值,神经元没有激活函数,则RNN最简单的前向传播过程如下:
S 1 = W x X 1 + W s S 0 + b 1 S_{1}=W_{x}X_{1}+W_{s}S_{0}+b_{1} S1=WxX1+WsS0+b1
O 1 = W o S 1 + b 2 O_{1}=W_{o}S_{1}+b_{2} O1=WoS1+b2
S 2 = W x X 2 + W s S 1 + b 1 S_{2}=W_{x}X_{2}+W_{s}S_{1}+b_{1} S2=WxX2+WsS1+b1
O 2 = W o S 2 + b 2 O_{2}=W_{o}S_{2}+b_{2} O2=WoS2+b2
S 3 = W x X 3 + W s S 2 + b 1 S_{3}=W_{x}X_{3}+W_{s}S_{2}+b_{1} S3=WxX3+WsS2+b1
O 3 = W o S 3 + b 2 O_{3}=W_{o}S_{3}+b_{2} O3=WoS3+b2
输入时间序列长度为t的数据,假设在t时刻,损失函数为 L t = 1 2 ( Y t − O t ) 2 L_{t}=\frac{1}{2}(Y_{t}-O_{t})^{2} Lt=21(Yt−Ot)2。
使用随机梯度下降算法训练RNN,其实就是对 W x 、 W s 、 W o W_{x}、W_{s}、W_{o} Wx、Ws、Wo以及 b 1 、 b 2 b_{1}、b_{2} b1、b2求偏导,并不断调整它们,使得 L t L_{t} Lt尽可能小的过程。
现在假设我们的时间序列只有3段, t 1 、 t 2 、 t 3 t_{1}、t_{2}、t_{3} t1、t2、t3。
我们对 t 3 t_{3} t3时刻的 W x 、 W s 、 W o W_{x}、W_{s}、W_{o} Wx、Ws、Wo求偏导(其他时刻类似):
∂ L 3 ∂ W 0 = ∂ L 3 ∂ O 3 ∂ O 3 ∂ W o \frac{\partial{L_{3}}}{\partial{W_{0}}}=\frac{\partial{L_{3}}}{\partial{O_{3}}}\frac{\partial{O_{3}}}{\partial{W_{o}}} ∂W0∂L3=∂O3∂L3∂Wo∂O3
∂ L 3 ∂ W x = ∂ L 3 ∂ O 3 ∂ O 3 ∂ S 3 ∂ S 3 ∂ W x + ∂ L 3 ∂ O 3 ∂ O 3 ∂ S 3 ∂ S 3 ∂ S 2 ∂ S 2 ∂ W x + ∂ L 3 ∂ O 3 ∂ O 3 ∂ S 3 ∂ S 3 ∂ S 2 ∂ S 2 ∂ S 1 ∂ S 1 ∂ W x \frac{\partial{L_{3}}}{\partial{W_{x}}}=\frac{\partial{L_{3}}}{\partial{O_{3}}}\frac{\partial{O_{3}}}{\partial{S_{3}}}\frac{\partial{S_{3}}}{\partial{W_{x}}}+\frac{\partial{L_{3}}}{\partial{O_{3}}}\frac{\partial{O_{3}}}{\partial{S_{3}}}\frac{\partial{S_{3}}}{\partial{S_{2}}}\frac{\partial{S_{2}}}{\partial{W_{x}}}+\frac{\partial{L_{3}}}{\partial{O_{3}}}\frac{\partial{O_{3}}}{\partial{S_{3}}}\frac{\partial{S_{3}}}{\partial{S_{2}}}\frac{\partial{S_{2}}}{\partial{S_{1}}}\frac{\partial{S_{1}}}{\partial{W_{x}}} ∂Wx∂L3=∂O3∂L3∂S3∂O3∂Wx∂S3+∂O3∂L3∂S3∂O3∂S2∂S3∂Wx∂S2+∂O3∂L3∂S3∂O3∂S2∂S3∂S1∂S2∂Wx∂S1
∂ L 3 ∂ W s = ∂ L 3 ∂ O 3 ∂ O 3 ∂ S 3 ∂ S 3 ∂ W s + ∂ L 3 ∂ O 3 ∂ O 3 ∂ S 3 ∂ S 3 ∂ S 2 ∂ S 2 ∂ W s + ∂ L 3 ∂ O 3 ∂ O 3 ∂ S 3 ∂ S 3 ∂ S 2 ∂ S 2 ∂ S 1 ∂ S 1 ∂ W s \frac{\partial{L_{3}}}{\partial{W_{s}}}=\frac{\partial{L_{3}}}{\partial{O_{3}}}\frac{\partial{O_{3}}}{\partial{S_{3}}}\frac{\partial{S_{3}}}{\partial{W_{s}}}+\frac{\partial{L_{3}}}{\partial{O_{3}}}\frac{\partial{O_{3}}}{\partial{S_{3}}}\frac{\partial{S_{3}}}{\partial{S_{2}}}\frac{\partial{S_{2}}}{\partial{W_{s}}}+\frac{\partial{L_{3}}}{\partial{O_{3}}}\frac{\partial{O_{3}}}{\partial{S_{3}}}\frac{\partial{S_{3}}}{\partial{S_{2}}}\frac{\partial{S_{2}}}{\partial{S_{1}}}\frac{\partial{S_{1}}}{\partial{W_{s}}} ∂Ws∂L3=∂O3∂L3∂S3∂O3∂Ws∂S3+∂O3∂L3∂S3∂O3∂S2∂S3∂Ws∂S2+∂O3∂L3∂S3∂O3∂S2∂S3∂S1∂S2∂Ws∂S1
可以看出对于 W 0 W_{0} W0求偏导并没有长期依赖,但是对于 W x 、 W s W_{x}、W_{s} Wx、Ws求偏导,会随着时间序列产生长期依赖。因为 S t S_{t} St随着时间序列向前传播,而 S t S_{t} St又是 W x 、 W s W_{x}、W_{s} Wx、Ws的函数。
根据上述求偏导的过程,我们可以得出任意时刻对 W x 、 W s W_{x}、W_{s} Wx、Ws求偏导的公式:
∂ L t ∂ W x = ∑ k = 0 t ∂ L t ∂ O t ∂ O t ∂ S t ( ∏ j = k + 1 t ∂ S j ∂ S j − 1 ) ∂ S k ∂ W x \frac{\partial{L_{t}}}{\partial{W_{x}}}=\sum_{k=0}^{t}{\frac{\partial{L_{t}}}{\partial{O_{t}}}\frac{\partial{O_{t}}}{\partial{S_{t}}}}(\prod_{j=k+1}^{t}{\frac{\partial{S_{j}}}{\partial{S_{j-1}}}})\frac{\partial{S_{k}}}{\partial{W_{x}}} ∂Wx∂Lt=∑k=0t∂Ot∂Lt∂St∂Ot(∏j=k+1t∂Sj−1∂Sj)∂Wx∂Sk
∂ L t ∂ W s = ∑ k = 0 t ∂ L t ∂ O t ∂ O t ∂ S t ( ∏ j = k + 1 t ∂ S j ∂ S j − 1 ) ∂ S k ∂ W s \frac{\partial{L_{t}}}{\partial{W_{s}}}=\sum_{k=0}^{t}{\frac{\partial{L_{t}}}{\partial{O_{t}}}\frac{\partial{O_{t}}}{\partial{S_{t}}}}(\prod_{j=k+1}^{t}{\frac{\partial{S_{j}}}{\partial{S_{j-1}}}})\frac{\partial{S_{k}}}{\partial{W_{s}}} ∂Ws∂Lt=∑k=0t∂Ot∂Lt∂St∂Ot(∏j=k+1t∂Sj−1∂Sj)∂Ws∂Sk
如果加上激活函数, S j = t a n h ( W x X j + W s S j − 1 + b 1 ) S_{j}=tanh(W_{x}X_{j}+W_{s}S_{j-1}+b_{1}) Sj=tanh(WxXj+WsSj−1+b1),
则 ∏ j = k + 1 t ∂ S j ∂ S j − 1 = ∏ j = k + 1 t t a n h ′ W s \prod_{j=k+1}^{t}{\frac{\partial{S_{j}}}{\partial{S_{j-1}}}}=\prod_{j=k+1}^{t}{tanh^{'}}W_{s} ∏j=k+1t∂Sj−1∂Sj=∏j=k+1ttanh′Ws
由于激活函数tanh的导数是小于1的,因此随着累乘的增加,RNN会出现梯度消失的情况。
现在来解释一下,为什么说RNN和DNN的梯度消失问题含义不一样?
- 先来说DNN中的反向传播:在DNN梯度消失及梯度爆炸的文章中,我推导了两个权重的梯度,第一个梯度是直接连接着输出层的梯度,求解起来并没有梯度消失或爆炸的问题,因为它没有连乘,只需要计算一步。第二个梯度出现了连乘,也就是说越靠近输入层的权重,梯度消失或爆炸的问题越严重,可能就会消失会爆炸。一句话总结一下,DNN中各个权重的梯度是独立的,该消失的就会消失,不会消失的就不会消失。
- 再来说RNN:RNN的特殊性在于,它的权重是共享的。抛开 W o W_o Wo不谈,因为它在某时刻的梯度不会出现问题(某时刻并不依赖于前面的时刻),但是 W s W_s Ws和 W x W_x Wx就不一样了,每一时刻都由前面所有时刻共同决定,是一个相加的过程,这样的话就有个问题,当距离长了,计算最前面的导数时,最前面的导数就会消失或爆炸,但当前时刻整体的梯度并不会消失,因为它是求和的过程,当下的梯度总会在,只是前面的梯度没了,但是更新时,由于权值共享,所以整体的梯度还是会更新,通常人们所说的梯度消失就是指的这个,指的是当下梯度更新时,用不到前面的信息了,因为距离长了,前面的梯度就会消失,也就是没有前面的信息了,但要知道,整体的梯度并不会消失因为当下的梯度还在,并没有消失。
- 一句话概括:RNN的梯度不会消失,RNN的梯度消失指的是当下梯度用不到前面的梯度了,但DNN靠近输入的权重的梯度是真的会消失,RNN 所谓梯度消失的真正含义是,梯度被近距离梯度主导,导致模型难以学到远距离的依赖关系。
【注】RNN实战可参考B站技术视频:北京大学-Tensorflow2.0-曹健老师