MWORKS.Syslab 使用攻略 | 信号处理工具箱实践-基于时差定位法的声源定位
在日常生活中,我们的耳朵会听到各种声音并进行识别定位,即所谓的“听声辨位”。有人发出声响后,人耳可以很快分辨出声音所在的方位;人耳也可轻易判断出从身边驶过的汽车的来车方向,甚至能大致知道汽车有多远;经过专业训练,人耳还可以挑战一些难度比较高的声源定位要求,例如盲人也可以踢足球。
声源定位技术是对语音或其他声音方位和位置的定位。例如,安防机器人、服务机器人、远程会议系统,在工作过程中需要对声音进行响应。安防机器人听到某个方向的声音比较大时,需要将摄像头对准该方向进行录像;服务机器人需要确定说话人的方位,以便面对服务对象进行对话;远程会议系统需要确定参会发言者位置,以便控制摄像头对发言者进行特写,将其近景视频传输至远程端,达到更好的直播效果。
信号处理领域,互相关是两个序列的相似性的度量,作为一个序列相对于另一个序列的位移的函数,这也称为滑动点积或滑动内积。它通常用于在长信号中搜索较短的已知特征,在模式识别、单粒子分析、电子断层扫描、密码分析和神经生理学等领域都有应用。互相关在本质上类似于两个函数的卷积。
一维互相关——信号匹配
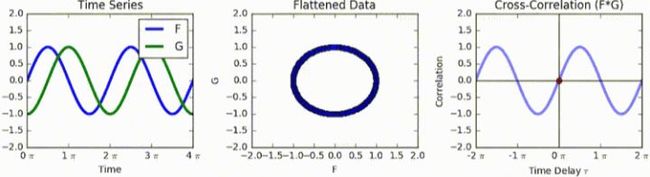
——相关性曲线
二维互相关——图像识别
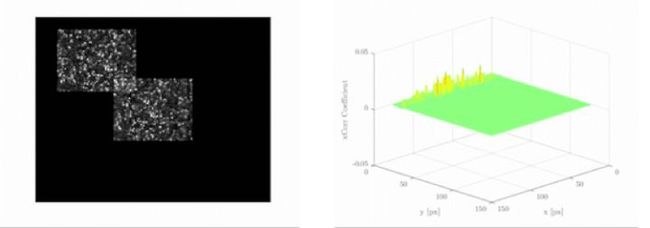
——相关性曲面
声源定位算法主要有以下两大类:
1.声全息法(Holography)
Holography 算法能够重构被测物周围的整个声场,从而可以获得任何面上的声压大小分布。通过假设被测物周围符合一定声场的数学模型,麦克风阵列采集到声场中多点的声压值,从而可以解出数学模型中的未知参数,得到整个声场信息。
2.时差定位法(Time Difference of Arrival,TDOA)
TDOA 算法主要核心是计算声源到达各个麦克风的时间差,以此得到声源、麦克风相对距离用于位置估计。其中时差定位法由互相关或广义互相关算法计算得到。
时差定位法示例
本文以时差定位法为例作为信号处理工具箱的实践应用,下文代码及图片均为 MWORKS.Syslab 编写及生成。

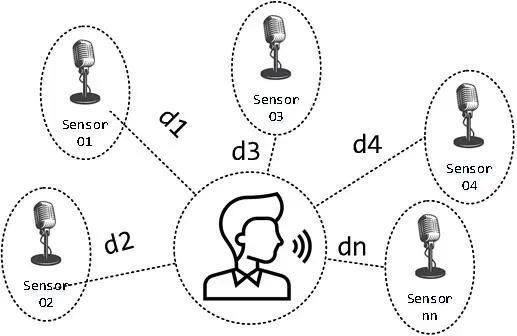
仅考虑二维平面空间,采用基于时延的声源定位算法,布置 N 个传感器进行坐标解算。
未知声源坐标 ![]() ,已知传感器
,已知传感器![]() 、
、![]() 、
、![]() ……,传感器间时延
……,传感器间时延 ![]() 、
、 ![]() ……,为实现声源位置解算,需要至少布置三个及以上的传感器,构成有效方程个数大于未知数个数的超定方程组,并采用优化方法得到最优解。针对非线性方程数组求解的优化方法有很多,本文针对仅布置三个麦克风(下文亦称之为“传感器”),基于 NLsolve 算法包(NLsolve 为 Julia 非线性方程求解算法包),通过迭代求解非线性方程数组的数值解。
……,为实现声源位置解算,需要至少布置三个及以上的传感器,构成有效方程个数大于未知数个数的超定方程组,并采用优化方法得到最优解。针对非线性方程数组求解的优化方法有很多,本文针对仅布置三个麦克风(下文亦称之为“传感器”),基于 NLsolve 算法包(NLsolve 为 Julia 非线性方程求解算法包),通过迭代求解非线性方程数组的数值解。
基于 TDOA 算法的多传感器定位方法
信号检测
信号检测阶段的主要目标是计算不同麦克风对同一声源信号的时延,需要依次完成采样、互相关分析、时延估计操作。
◎ 信号采样
模拟声源在安静室内发出持续时间约 0.2 秒的声波,三组麦克风持续监听,并完成音频信号的采样记录,采样率越高,信号检测算法越精确,本文采用采样频率为常规 44100 Hz。
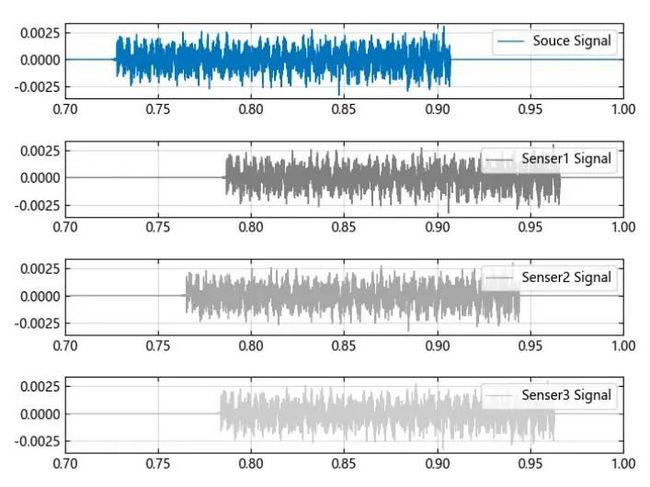
麦克风采样信号时域分析
◎ 互相关与时延分析
选择传感器 3 作为基准信号,用于计算接收信号的时延,基于相关性理论,采用核心函数 xcorr 对信号序列计算互相关及自相关,得到相关性分布曲线。
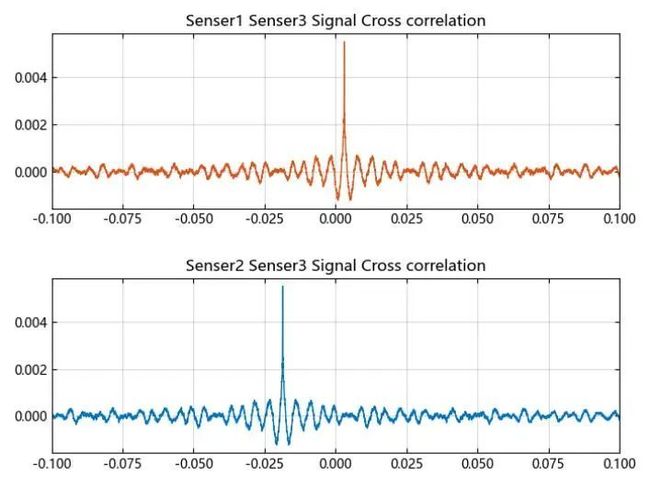
相关性分布曲线
搜寻峰值相关点用于时延计算,其中对传感器 3 信号做自相关估计用于计算基准时间,对传感器 1/3、2/3 做互相关估计用于计算相对时延,因而得到传感器 1/3 时延(delay13)约 -3 微秒、传感器 2/3 时延(delay23)约为 16 微秒。
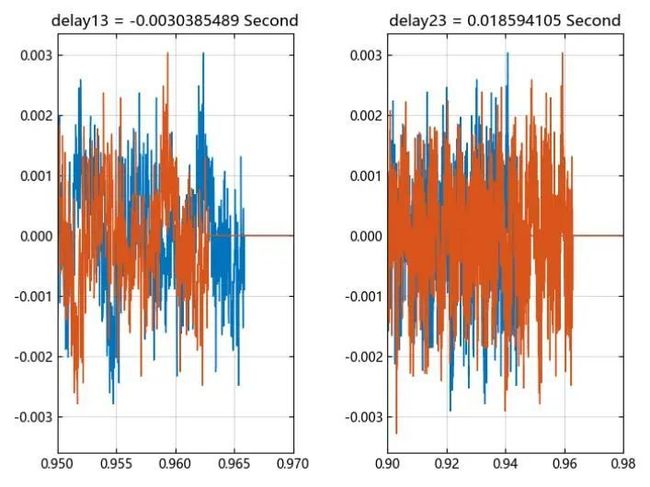
信号时延时域比较
附 Julia 计算代码:
# Julia Code
xCorr33, lags33 = xcorr(ro3)
xCorr13, lags13 = xcorr(ro1, ro3)
xCorr23, lags23 = xcorr(ro2, ro3)
_, I33 = findmax(abs.(xCorr33))
_, I13 = findmax(abs.(xCorr13))
_, I23 = findmax(abs.(xCorr23))
dealy13 = (I33 - I13) / fs
dealy23 = (I33 - I23) / fsdealy13 = -0.0030385489
dealy23 = 0.018594105f0声源定位
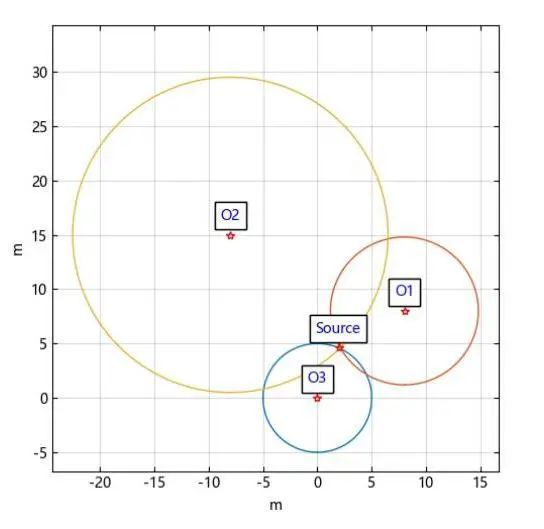
针对布置有三组麦克风的室内环境,描述声源平面坐标的方程组如下:
其中,声源坐标为![]() ,已知传感器坐标
,已知传感器坐标![]() 、
、 ![]() 、
、![]() ,传感器间时延差为
,传感器间时延差为![]() 、
、 ![]() ,
, ![]() 为传感器
为传感器 ![]() 到声源的距离。
到声源的距离。
考虑麦克风信号采样及互相关算法存在一定误差,需采用优化方法求解方程组,给定声源坐标迭代初值,并寻求非线性方程最优数值解。
这里,选择 ![]() 为系统状态变量
为系统状态变量  ,即:
,即:![]()
则系统方程为:
推导关于状态变量的雅可比矩阵为:
其中,![]() 、
、![]() 、
、![]() 、
、![]() ,并且根据信号检测得到的时延结果为
,并且根据信号检测得到的时延结果为![]() =- 0.0030385489、
=- 0.0030385489、![]() = 0.018594105,代入上式。
= 0.018594105,代入上式。
构建 F! 函数用于计算非线性系统残差,附 Julia 计算代码:
# Julia Code
function F!(F, x)
F[1] = x[1]^2 + (x[2] - 20)^2 - (x[3] + 0.0030385489 * 340)^2
F[2] = x[1]^2 + x[2]^2 - (x[3] - 0.018594105 * 340)^2
F[3] = (x[1] - 30)^2 + (x[2] - 10)^2 - x[3]^2
end
构建 J! 计算系统的雅可比矩阵,附 Julia 计算代码:
# Julia Code
function J!(J, x)
J[1, 1] = x[1] * 2
J[1, 2] = x[2] * 2 - 20 * 2
J[1, 3] = -x[3] * 2 - 0.0030385489 * 340 * 2
J[2, 1] = x[1] * 2
J[2, 2] = x[2] * 2
J[2, 3] = -x[3] * 2 + 0.018594105 * 340 * 2
J[3, 1] = x[1] * 2 - 30 * 2
J[3, 2] = x[2] * 2 - 10 * 2
J[3, 3] = -x[3] * 2
end
给定迭代算法初值,调用 NLsolve.nlsolve 函数求解。附 Julia 计算代码:
# Julia Code
result =# Julia Code
function J!(J, x)
J[1, 1] = x[1] * 2
J[1, 2] = x[2] * 2 - 20 * 2
J[1, 3] = -x[3] * 2 - 0.0030385489 * 340 * 2
J[2, 1] = x[1] * 2
J[2, 2] = x[2] * 2
J[2, 3] = -x[3] * 2 + 0.018594105 * 340 * 2
J[3, 1] = x[1] * 2 - 30 * 2
J[3, 2] = x[2] * 2 - 10 * 2
J[3, 3] = -x[3] * 2
end nlsolve(F!, J!, [5.0; 5.0; 10.0])
Results of Nonlinear Solver Algorithm
* Algorithm: Trust-region with dogleg and autoscaling
* Starting Point: [5.0, 5.0, 10.0]
* Zero: [12.002910310528083, 3.9953155842785555, 18.97238709871018]
* Inf-norm of residuals: 0.000000
* Iterations: 5
* Convergence: true
* |x - x'| < 0.0e+00: false
* |f(x)| < 1.0e-08: true
* Function Calls (f): 6
* Jacobian Calls (df/dx): 6
最终得到估计声源坐标 [12.002910310528083, 3.9953155842785555],与场景中模拟的真实坐标 [12,4] 偏差为 0.005514857933001404 米。
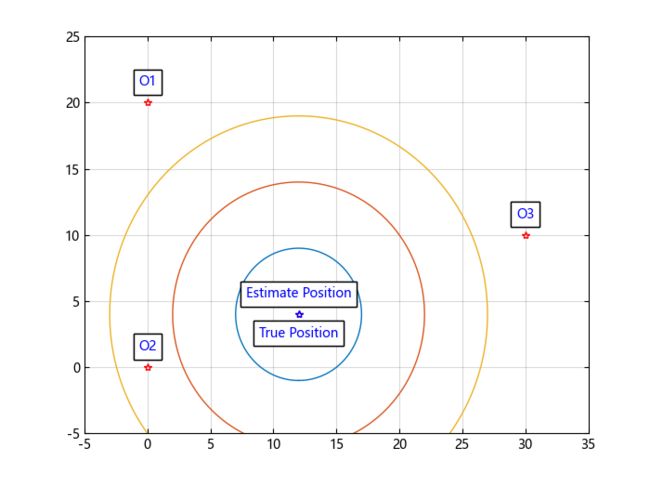
声源位置估计
考虑到真实环境下噪声不可避免,而环境背景噪声影响互相关定位算法精度,易造成定位精度不佳,可以为此引入信号滤波算法,估计声源信号的频率范围,使用带通滤波器 bandpass 函数过滤非相关频率噪声,可以在一定程度上提高算法鲁棒性,由于篇幅限制,不在本文介绍。

信号处理工具箱(TySignalProcessing)是 MWORKS.Syslab 推出的专业工具箱之一,由同元软控完全自主开发,提供一系列函数用于包括信号分析、预处理与特征提取,滤波器设计和分析、重新采样、平滑处理、去趋势和功率谱估计等场景。
本文以声源定位为例,简要介绍了信号处理工具箱的功能,在具体工程实践中,结合通信、DSP 系统等专业工具箱,可广泛应用在音频、图像、医疗、通信、安防、定位等行业。
MWORKS.Syslab 的基础版供用户免费使用,信号处理工具箱内嵌于软件安装包内,欢迎大家前往同元软控官网自行下载。官网的 MWORKS.Syslab 仅兼容 Win10 及以上系统,若需在 Win7、Linux 或其他系统上运行,请联系同元软控公司技术支持。