6、OpenCV掩码矩阵运算Mask
OpenCV掩码矩阵运算Mask
-
- 一、学习目标
- 二、掩码矩阵运算
- 三、两种解决方案
- 四、完整代码示例
- 五、致谢
一、学习目标
- 了解什么是掩码矩阵运算
- 学会2种方法实现掩码矩阵运算
- 使用锐化图像的实例
二、掩码矩阵运算
矩阵的掩码操作非常简单。这个想法是我们根据掩码矩阵(也称为内核)重新计算图像中的每个像素值。此掩码保存的值将调整相邻像素(和当前像素)对新像素值的影响程度。从数学的观点来看,我们用我们指定的值得到一个加权平均数作为新像素值,可对比计算机视觉中的卷积运算。
测试案例
假如我们要实现图像得对比度增强。简单讲就是,我们可以对图像的每个像素应用下面的公式:
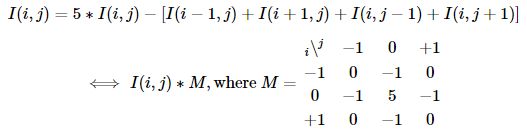
第一种表示法是使用公式,I 表示图像的像素矩阵,根据索引指定对应的行和列。而第二种表示法是使用掩码的形式。通过将掩码矩阵的中心(由0 - 0索引标记的大写字母)放在要计算的像素上,并将像素值乘以重叠的矩阵值并相加。掩码的中心值取值较大,相邻像素为-1,通过加权求和过后就扩大了像素值之间的差距,从而达到对比度增强的效果。
三、两种解决方案
1、循环遍历每个像素应用公式
结合上述公式的掩码操作,回想上次教程中我们对图像像素矩阵的遍历,我们很容易想到的方法是在循环中依次对每个像素应用上述公式:
void Sharpen(const Mat& myImage,Mat& Result)
{
CV_Assert(myImage.depth() == CV_8U);
const int nChannels = myImage.channels();
Result.create(myImage.size(),myImage.type());
for(int j = 1 ; j < myImage.rows-1; ++j)
{
const uchar* previous = myImage.ptr<uchar>(j - 1);
const uchar* current = myImage.ptr<uchar>(j );
const uchar* next = myImage.ptr<uchar>(j + 1);
uchar* output = Result.ptr<uchar>(j);
for(int i= nChannels;i < nChannels*(myImage.cols-1); ++i)
{
*output++ = saturate_cast<uchar>(5*current[i]
- current[i-nChannels] - current[i+nChannels] - previous[i] - next[i]);
}
}
}
代码讲解:
- 首先,调用CV_Assert()函数判断图像数据的类型是否为uchar类型,不满足则抛出异常。
- Result对象的create方法会根据输入图像myImage的尺寸和数据类型初始化Result。
- 遍历像素的循环采用了C风格的指针访问形式。previous表示当前处理行的上一行像素地址,current表示当前行像素地址,next表示下一行像素地址,由此对应掩码,找到中心像素左(current [i-nChannels] )上(previous[i])右(current[i+nChannels])下(next[i])的像素值。注意访问左右元素的时候需要加减一个通道数,这个可以对照Mat矩阵的存储格式理解。
- 对于根据掩码计算公式计算后得到的像素值,我们需要将其取值限定在有效的范围内(uchar类型对应的取值范围为[0,255]),对此,saturate_cast< uchar> 函数完美解决。
- 在图像的边界上,上面的符号会导致不存在的像素位置(如(- 1,1))。在这些点上,公式没有定义。一个简单的解决方案是在这些点上不应用掩码运算,直接设置边界上的像素为零:
Result.row(0).setTo(Scalar(0));
Result.row(Result.rows-1).setTo(Scalar(0));
Result.col(0).setTo(Scalar(0));
Result.col(Result.cols-1).setTo(Scalar(0));
2、使用 filter2D 函数
在图像处理中,应用这样的过滤器非常常见,因此OpenCV中有一个函数负责应用掩码(在某些地方也称为内核)。为此,你首先需要定义一个保存掩码的对象:
Mat kernel = (Mat_<char>(3,3) <<0, -1, 0,
-1, 5, -1,
0, -1, 0);
然后调用filter2D()函数指定输入、输出图像和使用的掩码:
filter2D( src, dst1, src.depth(), kernel );
filter2D 函数的函数原型为:
CV_EXPORTS_W void filter2D( InputArray src, OutputArray dst, int ddepth,
InputArray kernel, Point anchor = Point(-1,-1),
double delta = 0, int borderType = BORDER_DEFAULT );
- 参数 src:指定输入图像
- 参数 dst:指定输出图像,与输入图像的尺寸相同,数据类型相同
- 参数 ddepth: 目标图像的深度,可以以输入图像为准
- 参数 kernel:卷积核(或者说是相关核),一个单通道浮点数矩阵;如果你想将不同的内核应用到不同的通道,将图像使用split分离颜色平面并单独处理它们。
- 参数 anchor:内核的锚点,指示过滤点的相对内核的位置。锚点应该位于内核内;默认值(-1,-1)表示锚在内核中心。
- 参数 delta: 可选值,和进行掩码运算后的像素相加,然后存储到dst中
- 参数 borderType :边界像素类型
这个函数更短,更简洁,而且OpenCV内部做了一些优化,它通常比手工编码的方法更快。
四、完整代码示例
#include五、致谢
1、感谢OpenCV官方给出的学习案例,感谢大家的支持
2、感兴趣的小伙伴一起学习讨论。入群飞机票