NNDL 实验六 卷积神经网络(5)使用预训练resnet18实现CIFAR-10分类
5.5 实践:基于ResNet18网络完成图像分类任务
图像分类(Image Classification)
计算机视觉中的一个基础任务,将图像的语义将不同图像划分到不同类别。
很多任务可以转换为图像分类任务。
比如人脸检测就是判断一个区域内是否有人脸,可以看作一个二分类的图像分类任务。

数据集:CIFAR-10数据集,
网络:ResNet18模型,
损失函数:交叉熵损失,
优化器:Adam优化器,Adam优化器的介绍参考NNDL第7.2.4.3节。
评价指标:准确率。
5.5.1 数据处理
import os
import pickle
import numpy as np
def load_cifar10_batch(folder_path, batch_id=1, mode='train'):
if mode == 'test':
file_path = os.path.join(folder_path, 'test_batch')
else:
file_path = os.path.join(folder_path, 'data_batch_'+str(batch_id))
# 加载数据集文件
with open(file_path, 'rb') as batch_file:
batch = pickle.load(batch_file, encoding = 'latin1')
imgs = batch['data'].reshape((len(batch['data']),3,32,32)) / 255.
labels = batch['labels']
return np.array(imgs, dtype='float32'), np.array(labels)
imgs_batch, labels_batch = load_cifar10_batch(folder_path='D:\\qq\\1916645844\\FileRecv\\cifar-10-batches-py',
batch_id=1, mode='train')
# 打印一下每个batch中X和y的维度
print("batch of imgs shape: ", imgs_batch.shape, "batch of labels shape: ", labels_batch.shape)import torch
from torch.utils.data import Dataset, DataLoader
import torchvision.transforms as transforms
import PIL.Image as Image
class CIFAR10Dataset(Dataset):
def __init__(self, folder_path='D:\\qq\\1916645844\\FileRecv\\cifar-10-batches-py', mode='train'):
if mode == 'train':
# 加载batch1-batch4作为训练集
self.imgs, self.labels = load_cifar10_batch(folder_path=folder_path, batch_id=1, mode='train')
for i in range(2, 5):
imgs_batch, labels_batch = load_cifar10_batch(folder_path=folder_path, batch_id=i, mode='train')
self.imgs, self.labels = np.concatenate([self.imgs, imgs_batch]), np.concatenate([self.labels, labels_batch])
elif mode == 'dev':
# 加载batch5作为验证集
self.imgs, self.labels = load_cifar10_batch(folder_path=folder_path, batch_id=5, mode='dev')
elif mode == 'test':
# 加载测试集
self.imgs, self.labels = load_cifar10_batch(folder_path=folder_path, mode='test')
self.transform = transforms.Compose([
transforms.Resize((224, 224)),transforms.RandomHorizontalFlip(p=0.5),transforms.ToTensor(),transforms.Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225])])
def __getitem__(self, idx):
img, label = self.imgs[idx], self.labels[idx]
img = img.transpose(1, 2, 0)
img = Image.fromarray(np.uint8(img))
img = self.transform(img)
return img, label
def __len__(self):
return len(self.imgs)
train_dataset = CIFAR10Dataset(folder_path='D:\\qq\\1916645844\\FileRecv\\cifar-10-batches-py', mode='train')
dev_dataset = CIFAR10Dataset(folder_path='D:\\qq\\1916645844\\FileRecv\\cifar-10-batches-py', mode='dev')
test_dataset = CIFAR10Dataset(folder_path='D:\\qq\\1916645844\\FileRecv\\cifar-10-batches-py', mode='test')
5.5.2 模型构建
使用飞桨高层API中的Resnet18进行图像分类实验。
from torchvision.models import resnet18
resnet18_model = resnet18()
# print(resnet18_model)torchvision.models.resnet18()
什么是“预训练模型”?什么是“迁移学习”?(必做)
import torch.nn.functional as F
import torch.optim as opt
# 指定运行设备
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
print(device)
# 学习率大小
lr = 0.01
# 批次大小
batch_size = 64
# 加载数据
train_loader = DataLoader(train_dataset, batch_size=batch_size, shuffle=True)
dev_loader = DataLoader(dev_dataset, batch_size=batch_size)
test_loader = DataLoader(test_dataset, batch_size=batch_size)
# 定义网络
model = resnet18_model
model.to(device)
# 定义优化器,这里使用Adam优化器以及l2正则化策略,相关内容在7.3.3.2和7.6.2中会进行详细介绍
optimizer = opt.SGD(model.parameters(),lr=lr, momentum=0.9)
# 定义损失函数
loss_fn = F.cross_entropy
# 定义评价指标
metric = Accuracy()
# 实例化RunnerV3
runner = RunnerV3(model, optimizer, loss_fn, metric)
# 启动训练
log_steps = 3000
eval_steps = 3000
runner.train(train_loader, dev_loader, num_epochs=30, log_steps=log_steps,
eval_steps=eval_steps, save_path="best_model.pdparams")比较“使用预训练模型”和“不使用预训练模型”的效果。(必做)
import torch
# 新增准确率计算函数
def accuracy(preds, labels):
"""
输入:
- preds:预测值,二分类时,shape=[N, 1],N为样本数量,多分类时,shape=[N, C],C为类别数量
- labels:真实标签,shape=[N, 1]
输出:
- 准确率:shape=[1]
"""
print(preds)
# 判断是二分类任务还是多分类任务,preds.shape[1]=1时为二分类任务,preds.shape[1]>1时为多分类任务
if preds.shape[1] == 1:
# 二分类时,判断每个概率值是否大于0.5,当大于0.5时,类别为1,否则类别为0
# 使用'torch.can_cast'将preds的数据类型转换为float32类型
preds = torch.can_cast((preds>=0.5).dtype,to=torch.float32)
else:
# 多分类时,使用'torch.argmax'计算最大元素索引作为类别
preds = torch.argmax(preds,dim=1)
torch.can_cast(preds.dtype,torch.int32)
return torch.mean(torch.tensor((preds == labels), dtype=torch.float32))
class Accuracy():
def __init__(self):
"""
输入:
- is_logist: outputs是logist还是激活后的值
"""
# 用于统计正确的样本个数
self.num_correct = 0
# 用于统计样本的总数
self.num_count = 0
self.is_logist = True
def update(self, outputs, labels):
"""
输入:
- outputs: 预测值, shape=[N,class_num]
- labels: 标签值, shape=[N,1]
"""
# 判断是二分类任务还是多分类任务,shape[1]=1时为二分类任务,shape[1]>1时为多分类任务
if outputs.shape[1] == 1: # 二分类
outputs = torch.squeeze(outputs, axis=-1)
if self.is_logist:
# logist判断是否大于0
preds = torch.can_cast((outputs>=0), dtype=torch.float32)
else:
# 如果不是logist,判断每个概率值是否大于0.5,当大于0.5时,类别为1,否则类别为0
preds = torch.can_cast((outputs>=0.5), dtype=torch.float32)
else:
# 多分类时,使用'paddle.argmax'计算最大元素索引作为类别
preds = torch.argmax(outputs, dim=1).int()
# 获取本批数据中预测正确的样本个数
labels = torch.squeeze(labels, dim=-1)
batch_correct = torch.sum(torch.tensor(preds == labels, dtype=torch.float32)).cpu().numpy()
batch_count = len(labels)
# 更新num_correct 和 num_count
self.num_correct += batch_correct
self.num_count += batch_count
def accumulate(self):
# 使用累计的数据,计算总的指标
if self.num_count == 0:
return 0
return self.num_correct / self.num_count
def reset(self):
# 重置正确的数目和总数
self.num_correct = 0
self.num_count = 0
def name(self):
return "Accuracy"class RunnerV3(object):
def __init__(self, model, optimizer, loss_fn, metric, **kwargs):
self.model = model
self.optimizer = optimizer
self.loss_fn = loss_fn
self.metric = metric # 只用于计算评价指标
# 记录训练过程中的评价指标变化情况
self.dev_scores = []
# 记录训练过程中的损失函数变化情况
self.train_epoch_losses = [] # 一个epoch记录一次loss
self.train_step_losses = [] # 一个step记录一次loss
self.dev_losses = []
# 记录全局最优指标
self.best_score = 0
def train(self, train_loader, dev_loader=None, **kwargs):
# 将模型切换为训练模式
self.model.train()
# 传入训练轮数,如果没有传入值则默认为0
num_epochs = kwargs.get("num_epochs", 0)
# 传入log打印频率,如果没有传入值则默认为100
log_steps = kwargs.get("log_steps", 100)
# 评价频率
eval_steps = kwargs.get("eval_steps", 0)
# 传入模型保存路径,如果没有传入值则默认为"best_model.pdparams"
save_path = kwargs.get("save_path", "best_model.pdparams")
custom_print_log = kwargs.get("custom_print_log", None)
# 训练总的步数
num_training_steps = num_epochs * len(train_loader)
if eval_steps:
if self.metric is None:
raise RuntimeError('Error: Metric can not be None!')
if dev_loader is None:
raise RuntimeError('Error: dev_loader can not be None!')
# 运行的step数目
global_step = 0
# 进行num_epochs轮训练
for epoch in range(num_epochs):
# 用于统计训练集的损失
total_loss = 0
for step, data in enumerate(train_loader):
X, y = data
X = X.cuda()
y = y.cuda()
# 获取模型预测
logits = self.model(X)
logits = logits.cuda()
y = y.to(dtype=torch.int64)
loss = self.loss_fn(logits, y) # 默认求mean
total_loss += loss
# 训练过程中,每个step的loss进行保存
self.train_step_losses.append((global_step, loss.item()))
if log_steps and global_step % log_steps == 0:
print(
f"[Train] epoch: {epoch}/{num_epochs}, step: {global_step}/{num_training_steps}, loss: {loss.item():.5f}")
# 梯度反向传播,计算每个参数的梯度值
loss.backward()
if custom_print_log:
custom_print_log(self)
# 小批量梯度下降进行参数更新
self.optimizer.step()
# 梯度归零
optimizer.zero_grad()
# 判断是否需要评价
if eval_steps > 0 and global_step > 0 and \
(global_step % eval_steps == 0 or global_step == (num_training_steps - 1)):
dev_score, dev_loss = self.evaluate(dev_loader, global_step=global_step)
print(f"[Evaluate] dev score: {dev_score:.5f}, dev loss: {dev_loss:.5f}")
# 将模型切换为训练模式
self.model.train()
# 如果当前指标为最优指标,保存该模型
if dev_score > self.best_score:
self.save_model(save_path)
print(
f"[Evaluate] best accuracy performence has been updated: {self.best_score:.5f} --> {dev_score:.5f}")
self.best_score = dev_score
global_step += 1
# 当前epoch 训练loss累计值
trn_loss = (total_loss / len(train_loader)).item()
# epoch粒度的训练loss保存
self.train_epoch_losses.append(trn_loss)
print("[Train] Training done!")
# 模型评估阶段,使用'paddle.no_grad()'控制不计算和存储梯度
@torch.no_grad()
def evaluate(self, dev_loader, **kwargs):
assert self.metric is not None
# 将模型设置为评估模式
self.model.eval()
global_step = kwargs.get("global_step", -1)
# 用于统计训练集的损失
total_loss = 0
# 重置评价
self.metric.reset()
# 遍历验证集每个批次
for batch_id, data in enumerate(dev_loader):
X, y = data
X = X.cuda()
y = y.cuda()
# 计算模型输出
logits = self.model(X)
logits = logits.cuda()
# 计算损失函数
y=y.to(dtype=torch.int64)
loss = self.loss_fn(logits, y).item()
# 累积损失
total_loss += loss
# 累积评价
self.metric.update(logits, y)
dev_loss = (total_loss / len(dev_loader))
dev_score = self.metric.accumulate()
# 记录验证集loss
if global_step != -1:
self.dev_losses.append((global_step, dev_loss))
self.dev_scores.append(dev_score)
return dev_score, dev_loss
# 模型评估阶段,使用'paddle.no_grad()'控制不计算和存储梯度
@torch.no_grad()
def predict(self, x, **kwargs):
# 将模型设置为评估模式
self.model.eval()
# 运行模型前向计算,得到预测值
logits = self.model(x)
return logits
def save_model(self, save_path):
torch.save(self.model.state_dict(), save_path)
def load_model(self, model_path):
state_dict = torch.load(model_path)
self.model.load_state_dict(state_dict)resnet = models.resnet18(pretrained=True)
resnet = models.resnet18(pretrained=False)
ref:
【深度学习】使用预训练模型_DrCrypto的博客-CSDN博客_深度学习预训练模型操作
pytorch学习笔记之加载预训练模型_AI算法札记的博客-CSDN博客_pytorch加载预训练模型
思考题
1.阅读《Deep Residual Learning for Image Recognition》,了解5种深度的ResNet(18,34,50,101和152),并简单谈谈自己的看法。(选做)
这5种深度的resnet,分别是18,34,50,101和152,首先看表最左侧,我们发现所有的网络都分成5部分,分别是:conv1,conv2_x,conv3_x,conv4_x,conv5_x
101-layer那列,我们先看看101-layer是不是真的是101层网络,首先有个输入7x7x64的卷积,然后经过3 + 4 + 23 + 3 = 33个building block,每个block为3层,所以有33 x 3 = 99层,最后有个fc层(用于分类),所以1 + 99 + 1 = 101层,确实有101层网络;
注:101层网络仅仅指卷积或者全连接层,而激活层或者Pooling层并没有计算在内; 这里我们关注50-layer和101-layer这两列,可以发现,它们唯一的不同在于conv4_x,ResNet50有6个block,而ResNet101有23个block,查了17个block,也就是17 x 3 = 51层。
在使用了ResNet的结构后,可以发现层数不断加深导致的训练集上误差增大的现象被消除了,ResNet 网络的训练误差会随着层数增大而逐渐减小,并且在测试机上的表现也会变好,在ResNet推出后不久,Google就借鉴了ResNet的精髓,提出了 Inception V4和 Inception-ResNet-V2,并通过融合这两个模型,在 ILSVRC数据集上取得了惊人的 3.08%的错误率。可见,ResNet及其思想对卷积神经网络研究的贡献确实非常显著,具有很强的推广性。
layer3和layer4结构和layer2相同,无非就是通道数变多,输出尺寸变小;
ResNet18、34、50、101和152都是基于Basicblock,结构非常相似,差别只在于每个layer的block数。
2.用自己的话简单评价:LeNet、AlexNet、VGG、GoogLeNet、ResNet(选做)
LeNet:1.相比MLP,LeNet使用了相对更少的参数,获得了更好的结果。
2.设计了maxpool来提取特征。
AlexNet:AlexNet中包含了几个比较新的技术点,也首次在CNN中成功应用了ReLU、Dropout和LRN等Trick。同时AlexNet也使用了GPU进行运算加速。
VGG:
-
小卷积核。作者将卷积核全部替换为3x3(极少用了1x1);
-
小池化核。相比AlexNet的3x3的池化核,VGG全部为2x2的池化核;
-
层数更深特征图更宽。基于前两点外,由于卷积核专注于扩大通道数、池化专注于缩小宽和高,使得模型架构上更深更宽的同时,计算量的增加放缓;
-
全连接转卷积。网络测试阶段将训练阶段的三个全连接替换为三个卷积,测试重用训练时的参数,使得测试得到的全卷积网络因为没有全连接的限制,因而可以接收任意宽或高为的输入。
GoogLeNet:能更高效的利用计算资源,在相同的计算量下能提取到更多的特征,从而提升训练结果。
ResNet:1.超深的网络结构(超过1000层)。
2.提出residual(残差结构)模块。
3.使用Batch Normalization 加速训练(丢弃dropout)。

总结
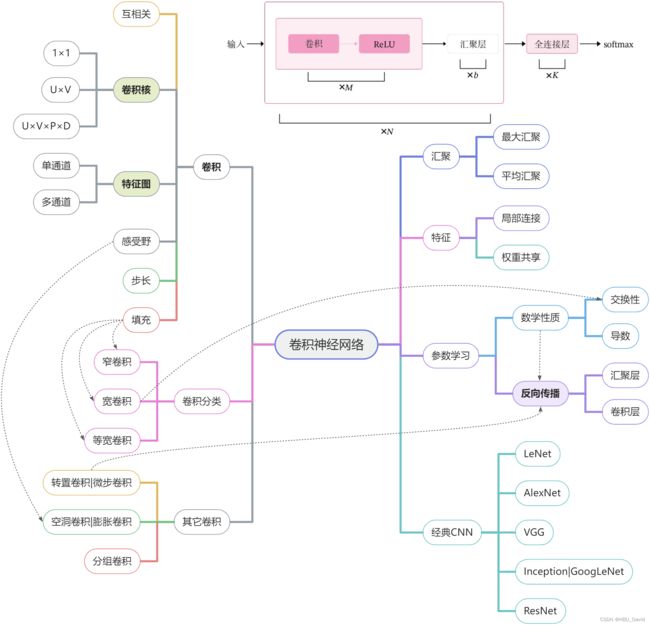
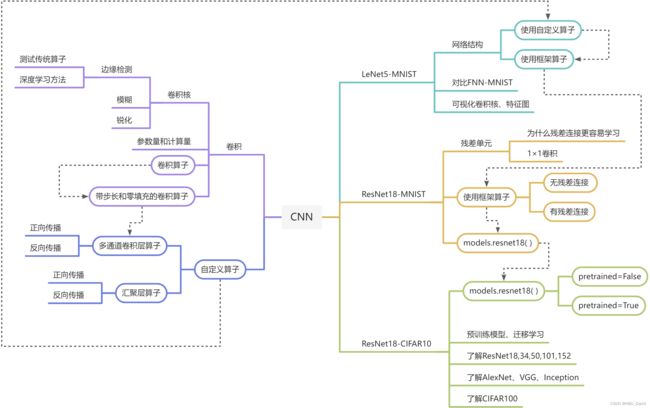
使用思维导图全面总结CNN(必做)