牛顿下山法matlab_优化算法之牛顿法

牛顿法(Newton's method)是一种在实数域和复数域上近似求解方程的方法,,它使用函数f(x)的泰勒级数的前面几项来寻找方程f(y)=0的根。 牛顿法最初由艾萨克·牛顿在《Method of Fluxions》(1671年完成,1736年公开发表)中提出。约瑟夫·鲍易也曾于1690年在Analysis Aequationum中提出此方法。
目录
1问题提出1. 问题提出
2. 基本思想
3. 迭代公式
4. 算法步骤
5. 算法收敛性
6. 解的情况
7. 阻尼牛顿法
8. 算法实现
9. 算法评价
对于无约束优化模型
其中![]() 为二阶连续光滑且Hessian阵可逆。
为二阶连续光滑且Hessian阵可逆。
用一个二次函数去近似目标函数f(x),然后精确地求出这个二次函数的极小点.
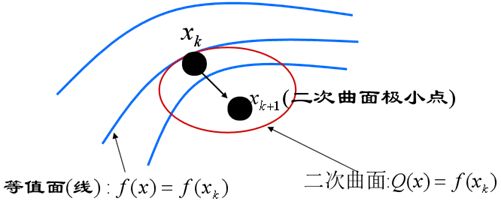
Newton法几何解释
3迭代公式Newton法的迭代公式为:

其中 称为牛顿方向。
称为牛顿方向。
考虑函数f(x)在点![]() 处的二次泰勒近似
处的二次泰勒近似

由于 可逆,则
可逆,则![]() 的一阶稳定点满足
的一阶稳定点满足![]() ,即
,即

由上式可得

这正是牛顿法的迭代公式。由此说明,牛顿法在每次迭代中考虑函数在当前的局部二次泰勒展开,其迭代步长为1,迭代方向是梯度方向经过Hessian逆阵的调整。如果函数f为凸函数,此时正定,从而 ,即牛顿方向是下降方向。
,即牛顿方向是下降方向。
牛顿法的算法步骤如下:
Step 0. 选取初始点![]() ,允许误差ε> 0,令 k=1;
,允许误差ε> 0,令 k=1;
Step 1. 计算![]() 。若
。若![]() ,算法停止;.否则,转 Step 2;
,算法停止;.否则,转 Step 2;
Step 2. 计算![]() 。置k=k+1,转 step 1.
。置k=k+1,转 step 1.
这里讨论牛顿算法的局部收敛性质,这是由于Hessian阵可能不总是正定,即![]() 牛顿方向可能不总是下降方向。我们假设目标函数f为凸函数,二阶连续可微,最优解
牛顿方向可能不总是下降方向。我们假设目标函数f为凸函数,二阶连续可微,最优解![]() 处正定。此时,在
处正定。此时,在![]() 附近的点,其也是正定的。从而牛顿方法是有定义的,并且在迭代步长最终取1的情况下具有二次收敛性。
附近的点,其也是正定的。从而牛顿方法是有定义的,并且在迭代步长最终取1的情况下具有二次收敛性。
定理:假设函数f二阶可微,其Hessian阵在最优解![]() 的邻域是Lipschitz连续的,且在
的邻域是Lipschitz连续的,且在![]() 处满足充分条件
处满足充分条件![]() 且
且![]() 正定。考虑迭代公式
正定。考虑迭代公式![]() ,则下面结论成立:
,则下面结论成立:
(i)如果初始点![]() 充分接近解点
充分接近解点![]() ,算法产生的点列
,算法产生的点列 收敛到
收敛到![]() ;
;
(ii)点列收敛速率是二次的;
(iii)梯度模长的点列 二次收敛到0.
二次收敛到0.
用Newton法求解无约束问题会出现以下情形:
算法收敛到极小点;
算法收敛到鞍点;
Hesse矩阵不可逆,无法迭代下去。
牛顿法的有效性严重依赖初始点的选择,即初始点需要充分靠近极小值点,否则可能导致算法不收敛。由于实际问题的精确最小值点一般是不知道的,因此初始点的选择给算法的实现带来了很大的挑战。为了解决这一问题,可引入线搜索技术以得到大范围的收敛算法,即阻尼牛顿法。
阻尼牛顿法的算法步骤如下:
Step 0. 选取初始点![]() ,允许误差ε> 0,令 k=1;
,允许误差ε> 0,令 k=1;
Step 1. 计算![]() 。若
。若![]() ,算法停止;.否则,转 Step 2;
,算法停止;.否则,转 Step 2;
Step 2. 取搜索方向![]() ,利用线搜索技术确定步长
,利用线搜索技术确定步长![]() ;
;
Step 3. 令![]() 。置k=k+1,转 step 1.
。置k=k+1,转 step 1.
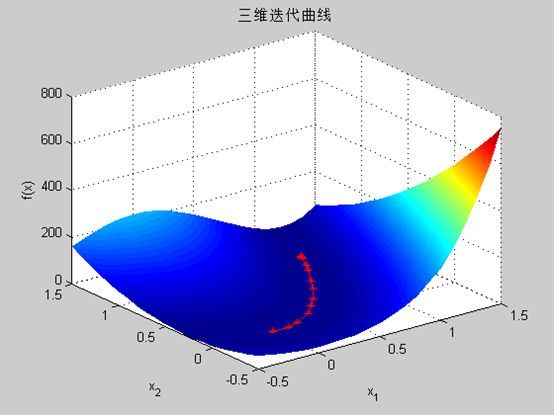
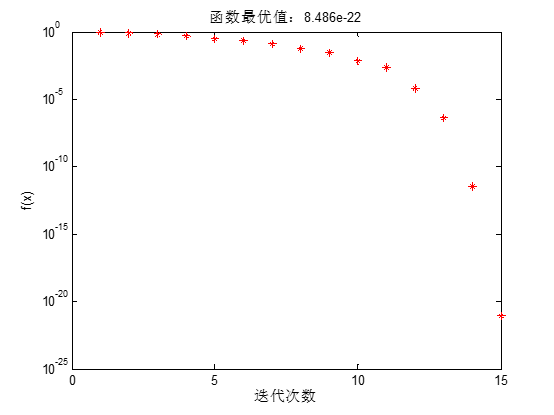
例1:求解无约束优化问题

该问题有精确解![]()
解:
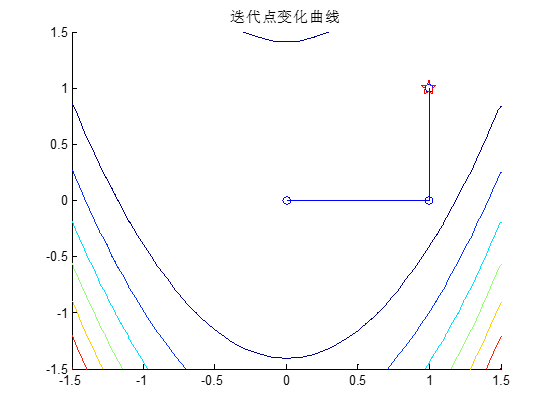
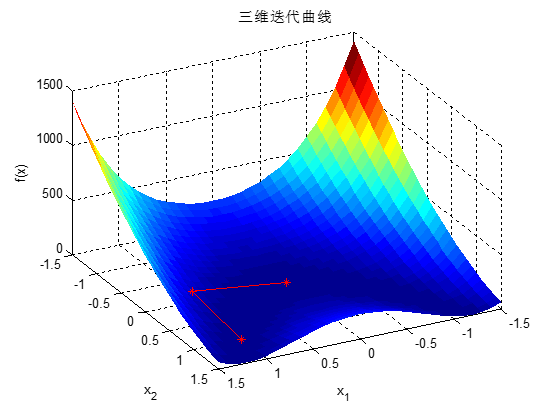
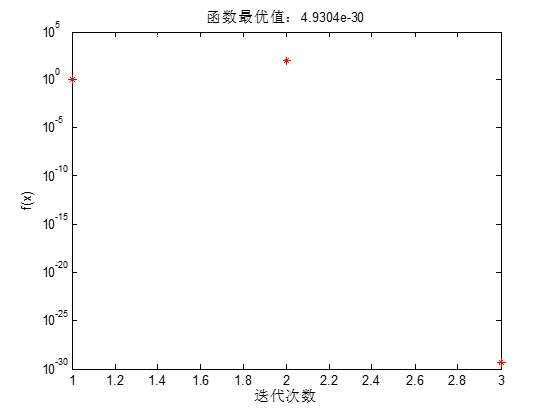
方法1:牛顿法法
使用 MATLAB 编写最速下降法的主函数如下:
function [X,Y,Error] = Newton(x0)
%使用牛顿法求解无约束问题:min f(x)
%输入:x0为初始点,fun为目标函数,grad为梯度函数
%输出:X,Y分别为每一步的迭代点及相应函数值,Error为误差
tic
%% 定义目标函数及导函数信息(可以根据需要进行修改)
f = @(x)100*(x(1)^2-x(2))^2+(x(1)-1)^2; %目标函数
g = @(x)[400*x(1)*(x(1)^2-x(2))+2*(x(1)-1);-200*(x(1)^2-x(2))]; %一阶导数
G = @(x)[1200*x(1)^2-400*x(2)+2,-400*x(1);-400*x(1), 200 ]; %二阶导数
%% 初始化算法参数
n = 1;
e = norm(g(x0));
X = x0;
Y = f(x0);
Error = e;
%% 设定终止条件
N = 5000; %最大迭代步
E = 1e-6; %给定误差
%% 迭代
while n < N && e > E
n = n+1;
%判断Hesse矩阵是否可逆
ifdet(G(x0)) == 0
disp('Hesse矩阵不可逆,无法进行迭代!');
break
else
d =-inv(G(x0))*g(x0); %迭代方向
x0 =x0+d; %迭代公式
X(:,n)= x0;
Y(n) =f(x0);
e =norm(g(x0));
Error(n) = e;
end
end
toc
end
调用格式如下:
x0 = [0;0]; %迭代初始点(可以根据需要修改)
[X,Y,E]=Newton(x0);
本问题求解结果如下:
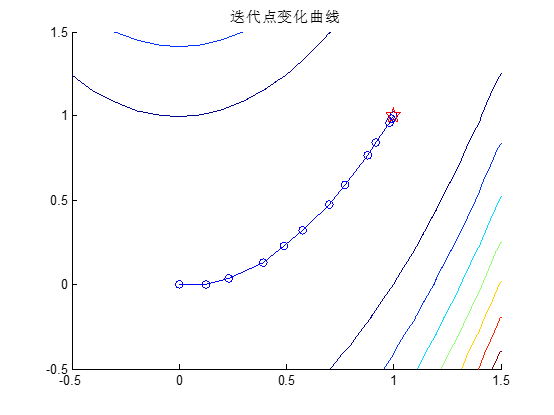
方法2:阻尼牛顿法
使用 MATLAB 编写最速下降法的主函数如下:
function [X,Y,Error] =ZNNewton(x0)
%使用阻尼牛顿法求解无约束问题:min f(x)
%使用非精确Armijo搜索步长规则
%输入:x0为初始点,fun为目标函数,grad为梯度函数
%输出:X,Y分别为每一步的迭代点及相应函数值,Error为误差
tic
%% 初始化参数
f = @(x)100*(x(1)^2-x(2))^2+(x(1)-1)^2; %目标函数
g =@(x)[400*x(1)*(x(1)^2-x(2))+2*(x(1)-1);-200*(x(1)^2-x(2))]; %一阶导数
G =@(x)[1200*x(1)^2-400*x(2)+2, -400*x(1);-400*x(1), 200 ]; %二阶导数
%% 初始化算法参数
n = 1;
e = norm(g(x0));
X = x0;
Y = f(x0);
Error = e;
beta=0.5;sigma=0.4;
%% 设定终止条件
N = 5000; %最大迭代步
E = 1e-6; %给定误差
%% 迭代
while n < N &&e > E
n = n+1;
%判断Hesse矩阵是否可逆
if det(G(x0)) == 0
disp('Hesse矩阵不可逆,无法进行迭代!');
break
else
d = -inv(G(x0))*g(x0); %迭代方向
%使用Armijo法求步长
m=0; mk=0;
while(m<20)
if(f(x0+beta^m*d)
mk=m; break;
end
m=m+1;
end
x0 = x0+beta^mk*d; %迭代公式
X(:,n) = x0;
Y(n) = f(x0);
e = norm(g(x0));
Error(n) = e;
end
end
toc
end
调用格式如下:
x0 = [0;0]; %迭代初始点(可以根据需要修改)
[X,Y,E]=ZNNewton(x0);
本问题求解结果如下:
1)优点:
Newton法产生的点列
 若收敛,则收敛速度快---具有至少二阶收敛速率;
若收敛,则收敛速度快---具有至少二阶收敛速率;Newton法具有二次终止性,即对强凸函数Newton法只需迭代一次就能得到最优值。
2)缺点:
Newton法可能会出现在某步迭代时,目标函数值上升;
当初始点远离极小点时,Newton法产生的点列可能不收敛,或者收敛到鞍点,或者Hesse矩阵不可逆,无法计算;
Newton法需要计算Hesse矩阵,计算量大.
往期回顾
算法丨优化算法之最速下降法
算法丨经典优化算法大合集(比赛备用,值得收藏)
算法丨优化算法系列之遗传算法原理
算法丨优化算法系列之遗传算法MATLAB程序设计及应用实例
算法丨优化算法系列之模拟退火算法(1)
算法丨优化算法系列之模拟退火算法(2)——0-1背包问题
参考文献:马昌凤.最优化方法及其 Matlab 程序设计[M]. 科学出版社, 2010.
