线代控制理论7——反馈、镇定、状态观测器
注:本文是在MOOC平台上学习西北工业大学《现代控制理论基础》(郭建国、赵斌、郭宗易)的课程进行随笔记录与整理
一.两类反馈及其影响
反馈可以分为两种形式:状态反馈与输出反馈
| 反馈形式 | 反馈方程 | 动态方程 | 传递函数 |
|---|---|---|---|
| 状态反馈 | u=-kx+v | x`=(A-BK)x+Bv,y=Cx | G(s)=C (sI-A+BK)^(-1) Bv |
| 输出反馈 | u=-Fy+v | x`=(A-BFC)X+Bv,y=Cx | G(s)=C (sI-A+BFC)^(-1) Bv |
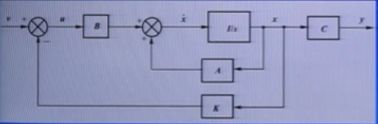
状态反馈示意图:(用x)
输出反馈示意图:(用y)

一个输出反馈系统的性能一定有对应的状态反馈系统与之等同:
令输出反馈中的 K=FC
一个状态反馈系统的性能不一定有对应的输出反馈系统与之等同:
KC^(-1)=F ?
2.影响
| 反馈类型 | 能控性 | 能观性 | 稳定性 |
|---|---|---|---|
| 状态反馈 | 不改变 | 可能改变 | 改变 |
| 输出反馈 | 不改变 | 不改变 | 改变 |
表是进行更好记忆的总结,文字描述的话就看下面的内容:
★状态反馈对 能控能观 的影响:
状态反馈的引入,不改变系统的能控性,但可能改变系统的能观测性。(用秩判据+矩阵相关性质证明)
状态反馈系统不一定能保持能观测性。
★输出反馈对 能控能观 的影响:
输出反馈的引入既不改变系统的能控性,也不改变系统的能观测性。
★对稳定性影响:
状态反馈和输出反馈都能影响系统稳定性。
稳定性与特征值有关,在加入反馈后改变了方程,因此也就改变了稳定性。
二.状态反馈设计
1.状态反馈设计思路
在经典控制中,采用极点配置的方法。
是由于极点与系统的特性密切相关,例如是否稳定,能够收敛等等。但经典控制采用的设计方法都是试凑法,没有办法事先给出控制是否存在的结论。
对于单输入系统:状态方程:x` = Ax + Bu
设计一个1×n维的矩阵:u = -kx + u
状态反馈系统状态方程为:x`= A - bkx + bv
★用状态反馈 使闭环极点配置在 任意位置 上的充要条件是:受控对象能控。
若系统不完全能控,则不能控部分的状态变量不受输入控制,对应极点不可配置。
2.极点配置算法
1)判断系统能控性——能控才能配置
用状态反馈完成极点配置时,需要知道系统要配置的期望极点。
2)计算状态反馈系统 闭环特征多项式(设k)

3)计算给定极点的特征多项式

4)由f*(λ)=f(λ), 系数相同,求k0,…k(n-1)
★选择状态反馈矩阵的元素时,要防止数值过大,以免动态性能产生不良影响,以及不易进行物理实现;配置极点时,也并非离虚轴越远越好,以免造成频带过宽,使抗干扰性降低
★状态反馈对零点的影响:
状态反馈不改变系统的零点,但可能改变系统的能观测性;
闭环零点对系统动态性能影响很大,在规定待配置的极点时,必须充分考虑零点的影响;
当任意配置极点导致零极点相消时,可能将原有的能观测性转为不能观测,也可能使原有的不能观测变为能观测;
3.状态反馈可镇定
受控对象的能控性 ≠ 系统稳定性
受控对象的极点配置 ≠ 闭环系统稳定性
受控对象存在状态反馈使闭环系统稳定,则称该数控系统是状态反馈可镇定的。
线性定常系统 状态反馈可镇定 的充要条件是:受控对象不可控子系统是稳定的。
原因:系统不完全能控,可以通过结构分解;能控部分的极点可以任意配置,但是不能控部分极点不受反馈影响,因此这些不能控部分都有负实部则可以整体镇定。
★能控系统一定是可镇定的,可镇定系统不一定是能控的。
4.用状态反馈消除系统误差
(终于等到了看这个慕课的原始目的,这个部分和某些论文里的输出调节/内模原理相关啦)
以下都是以偏差和参考输入为阶跃为前提:(当扰动或者参考输入为幂函数时,需要引入多重积分器)
状态反馈消除稳态误差:通过引入偏差向量积分构成增广矩阵→增广矩阵能控→对增广系统采用状态反馈→用终值定理可得能够消除误差

增广受控对象能控的充要条件:
1)受控对象能控,(A,B)能控
2)

!:输入维数大于等于输出维数
对增广系统采用状态反馈:
![]()
闭环系统的状态方程为:

(最后一步极限的判断我也是有点不清楚过程。)
。。
三.全维状态观测器
1.实现任意极点配置的输出反馈
另一种输出反馈:输出至状态微分的反馈
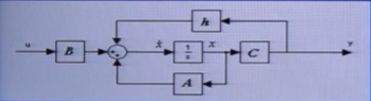
x` = Ax - hy + Bu
y = cx
x` = (A-hc)x + Bu
输出反馈下的传函:
![]()
定理:用 输出至状态微分的反馈阵h 任意配置极点的充要条件是:受控对象能观测
2.全维状态观测器
背景:
受控对象能控时,利用状态反馈配置极点,需要用传感器测量出状态变量,但传感器通常用来测量输出,许多中间变量不易测得,因此利用输出量和输入量通过 状态观测器/状态估计器/重构器 来重构状态问题。
存在条件:
全维状态观测器存在的条件是:系统是能观测的
设计方法:

图示:

状态反馈与状态观测器部分相比较:
A,B,C阵的位置与内容都是不变的;
将上面的输出与下面的输出做差,再作为下面部分 状态微分的反馈,以实现x^渐进等于x
3.分离定理
若受控系统能控能观,用全维观测器得到的状态形成状态反馈时,其系统极点配置和状态观测器设计可以分开独立运行,即K和L的设计可以分开独立运行。


★增广系统传递矩阵 与 状态反馈部分传递矩阵 完全相同,与观测器部分无关。
★用观测器给出的估计状态作为状态反馈,没有影响状态反馈部分的输入-输出特性,观测器极点在增广系统传递矩阵中没有反应。