点云处理:bin二进制文件转pcd文件
一、二进制文件说明

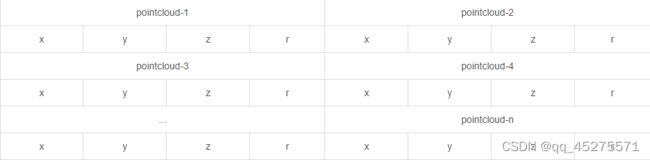
点云数据以浮点二进制文件格式存储,每行包含8个数据,每个数据由四位十六进制数表示(浮点数),每个数据通过空格隔开。一个点云数据由四个浮点数数据构成,分别表示点云的x、y、z、r(强度 or 反射值),点云的存储方式如下表所示:
即每行包含两点的XYZI,那么只需要对一个点赋值对应的XYZI值,并将该点压入点云中即可。
二、代码
#include 结果如下:

根据data文件夹下的二进制文件生成了对应点云数据。
二进制文件:

pcd文件

pcd文件简单显示:

三、注意
需要适应于自己的文件名和文件夹哦!