基于Opencv c++图像三维空间旋转(使用二维旋转、缩放进行代替的方式---思路转换)
针对于图像的三维旋转,看了很多博客,一般的变换都是基于刚性变换、相似变换、仿射变换、透射变换,而真正的基于图像的三维旋转却是很少的。当然真正的图像实现三维旋转的过程是可以使用PPT进行一个演示的,PPT之中可以设定针对与x轴、y轴、z轴进行三维旋转变换的过程。
这是是提供一个思路,使用一般的变换代替三维旋转的过程,从而提取出来有效的信息。
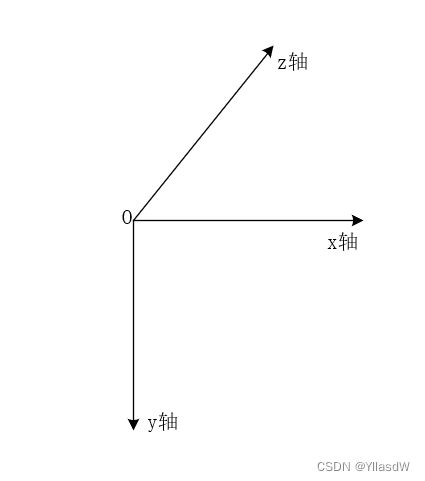
真正的图片三维旋转的过程之中,是围绕图中三个坐标轴进行旋转的过程,但是opencv之中没有关于x轴、y轴进行旋转的方式代码的整理。为了提取出围绕x轴、y轴之中的信息,可以使用缩放的想法去替代旋转,当然,这种思路会影响图片旋转过程之中的直观感受,但是图片信息并不会丢失。
围绕x轴旋转---右手大拇指指向轴向正方向,其余四指指向旋转正方向
举个栗子:原始图片围绕x轴旋转30度,由于相机之中显示的图片是一个二维图片,z轴是不存在的.可以想像一下实际的空间之中,x轴的坐标是不发生变化的,y轴的坐标缩小为原来的cos30°。并不影响原来的信息丢失。

就像上图之中L的斜率,原来是k,之后就变成了kcos15°,原始信息会根据旋转的变化而发生变化。这里应当特别注意,这种方式只是适合对于在实际坐标系之中的小角度的变换,并且在转换前后是不存在歧义性的时候可以使用,当存在一定的歧义性是不可以使用这种方式(实际问题实际考虑)
实现原理是很好进行理解的,在竖直方向和水平方向上的像素进行一定的缩放,就是可以达到相应的一个效果,比如说水平方向上的像素不发生变化,竖直方向上的像素变成原来的cos(30)就是如下面的代码所示。
具体的的代码如下所示:看了一些代码是进行三次样条插值啥的,如果要是想要水一水论文的时候,可以使用那种比较复杂的什么插值啥的,但是下面这个是足够使用。
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/highgui/highgui.hpp"
#include
#include
#include
using namespace cv;
using namespace std;
double acos(double x);
#define PI 3.14159265
void fun1(cv::Mat& src, double kx, double ky)
{
int row = src.rows * kx;
int col = src.cols * ky;
cv::Mat dst(row, col, src.type());
for (int i = 0; i < row; i++)
{
int srx = i / kx;
for (int j = 0; j < col; j++)
{
int sry = j / ky;
dst.at(i, j) = src.at(srx, sry);
}
}
cv::imwrite("C:\\Users\\td\\Desktop\\第二步\\1.相机标定(单目、双目)\\相机标定(单目、双目)\\4.png", dst);
}
void main()
{
cv::Mat src = cv::imread("C:\\Users\\td\\Desktop\\第二步\\1.相机标定(单目、双目)\\相机标定(单目、双目)\\Pic_1.bmp");
fun1(src, acos(30), 1);//参数2是Y轴进行放缩的过程,参数3是x轴进行放缩的过程。
}
//实际的操作函数cos之中输入的是弧度,这里为了更好的演示,我直接这里进行转化好了
double acos(double x)
{
return cos(x * PI / 180.0);
}
输入图像:观察到其像素关系是4096*2160

输出图像:观察到其输出图像的像素为4096*1870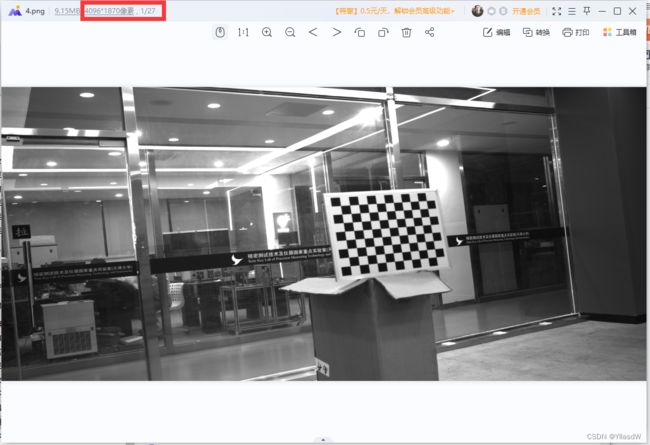
通过竖直方向的像素可以得知,原来的2160变成了1870,也就是2160*cos(30°)约为1870,就是进行了一个转换过程,是不是通俗易懂。
围绕y轴的旋转过程是和上面的过程是类似的
围绕z轴旋转---右手大拇指指向轴向正方向,其余四指指向旋转正方向
旋转原理如下所示:
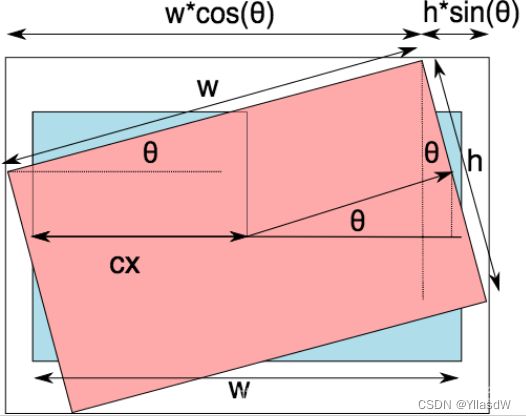
这里我们将z轴放置在图像正中间,其效果是与放置在图像的左上角的效果是一样的。旋转代码如下所示:
#include
#include
#include
#include
using namespace cv;
void rotate_Demo(Mat& image) {
Mat dst_0, dst_1, M;
int h = image.rows;
int w = image.cols;
M = getRotationMatrix2D(Point(w / 2, h / 2), 10, 1.0);
warpAffine(image, dst_0, M, image.size());
double cos = abs(M.at(0, 0));
double sin = abs(M.at(0, 1));
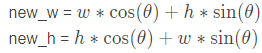
int new_w = cos * w + sin * h;
int new_h = cos * h + sin * w;
M.at(0, 2) += (new_w / 2.0 - w / 2);
M.at(1, 2) += (new_h / 2.0 - h / 2);
warpAffine(image, dst_1, M, Size(new_w, new_h), INTER_LINEAR, 0, Scalar(255, 255, 0));
namedWindow("output", WINDOW_NORMAL);
imshow("output", dst_0);
namedWindow("output1", WINDOW_NORMAL);
imshow("output1", dst_1);
}
int main(int argc, char** argv) {
Mat src = imread("C:\\Users\\td\\Desktop\\第二步\\1.相机标定(单目、双目)\\相机标定(单目、双目)\\Pic_1.bmp");
if (src.empty()) {
printf("Could not load images...\n");
return -1;
}
namedWindow("input", WINDOW_NORMAL);
imshow("input", src);
rotate_Demo(src);
waitKey(0);
destroyAllWindows();
return 0;
}
输入图像:
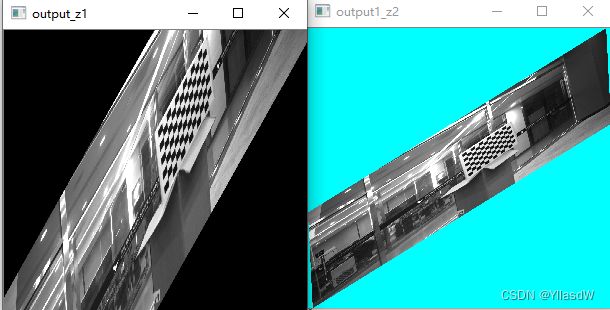
输出图像:

可以见到输出的图像之中output是存在原始的信息丢失的,因此,需要输出一个完整的图像,就是需要进行output1的操作。
围绕x轴旋转之后,围绕z轴旋转代码
这里围绕y轴进行旋转的过程与x轴是相同道理。因此,这里写的代码是不包含围绕y轴进行旋转的。将上述代码进行一个整合,代码是如下所示:
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/highgui/highgui.hpp"
#include
#include
#include
using namespace cv;
using namespace std;
#define PI 3.14159265
Mat fun1(cv::Mat& src, double kx, double ky);//进行围绕x轴旋转的函数
Mat rotate_Demo(Mat& image, double z);//围绕y轴进行旋转
double acos(double x);//角度转换为弧度
int main()
{
//输入图像
cv::Mat src = cv::imread("C:\\Users\\td\\Desktop\\第二步\\1.相机标定(单目、双目)\\相机标定(单目、双目)\\Pic_1.bmp");
if (src.empty()) {
printf("Could not load images...\n");
return -1;
}
//显示输入的图像
namedWindow("input", WINDOW_NORMAL);
imshow("input", src);
//围绕x轴进行旋转,输出图像为rx
Mat rx = fun1(src, acos(80), 1);//参数2是Y轴进行放缩的过程,参数3是x轴进行放缩的过程。
//围绕z轴进行旋转,输出图像为
Mat rz = rotate_Demo(rx, 10);
waitKey(0);
return 0;
}
//实际的操作函数cos之中输入的是弧度
double acos(double x)
{
return cos(x * PI / 180.0);
}
Mat fun1(cv::Mat& src, double kx, double ky)
{
int row = src.rows * kx;
int col = src.cols * ky;
cv::Mat dst(row, col, src.type());
for (int i = 0; i < row; i++)
{
int srx = i / kx;
for (int j = 0; j < col; j++)
{
int sry = j / ky;
dst.at(i, j) = src.at(srx, sry);
}
}
namedWindow("output_x", WINDOW_NORMAL);
imshow("output_x", dst);
cv::imwrite("C:\\Users\\td\\Desktop\\第二步\\1.相机标定(单目、双目)\\相机标定(单目、双目)\\4.png", dst);//如果要是不需要写入图片的话,这一句话是可以删掉的
return dst;
}
Mat rotate_Demo(Mat& image,double z) {
Mat dst_0, dst_1, M;
int h = image.rows;
int w = image.cols;
M = getRotationMatrix2D(Point(w / 2, h / 2), z, 1.0);
warpAffine(image, dst_0, M, image.size());
double cos = abs(M.at(0, 0));
double sin = abs(M.at(0, 1));
int new_w = cos * w + sin * h;
int new_h = cos * h + sin * w;
M.at(0, 2) += (new_w / 2.0 - w / 2);
M.at(1, 2) += (new_h / 2.0 - h / 2);
warpAffine(image, dst_1, M, Size(new_w, new_h), INTER_LINEAR, 0, Scalar(255, 255, 0));
namedWindow("output_z1", WINDOW_NORMAL);
imshow("output_z1", dst_0);
namedWindow("output1_z2", WINDOW_NORMAL);
imshow("output1_z2", dst_1);
return dst_1;
}
输入图像:

经过围绕x轴旋转:见下面的像素变化,这里设定是80°,是正确的
之后围绕z轴进行旋转:
上述就是将围绕三维坐标轴旋转,使用二维旋转与图片相似伸缩变换进行替代的过程,将思路进行一个转化,问题就解决了。