pytorch深度学习实战lesson11
第十一课 感知机你太美
目录
理论部分
感知机
60年代的算法
现代感知机算法
感知机的问题:
多层感知机
单隐藏层的多层感知机(单分类)
激活函数的选择
实践部分
从零开始:
简洁实现:
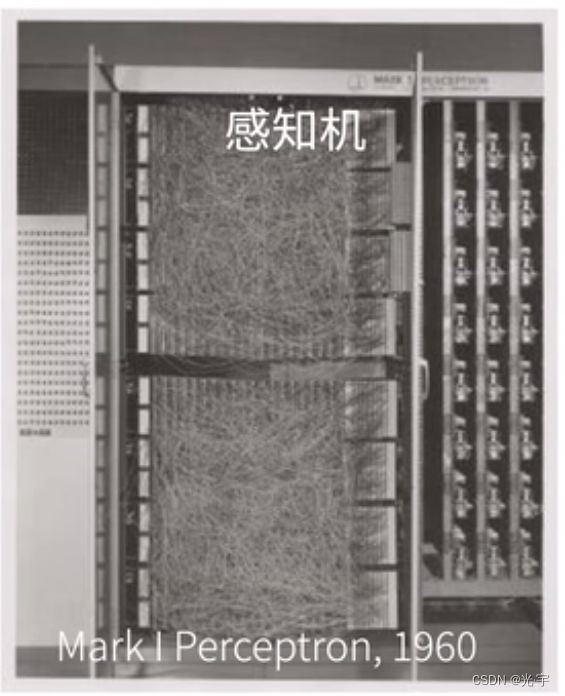
上图所示是60年的感知机,可以看到每一个权重都有一根线去传输,可见其工作量之大!现如今肯定有更简洁的方法去实现感知机了,下面让我们和沐神来学一下感知机的原理和设计方法把!!!
理论部分
感知机
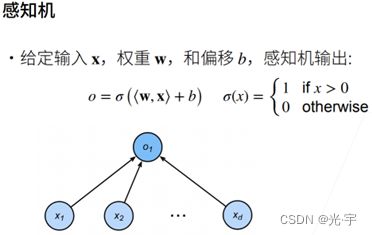
感知机和线性回归比:
他们的相同点是都有一个输出,但是线性回归输出的是一个实数,但感知机输出的是一个离散的类;
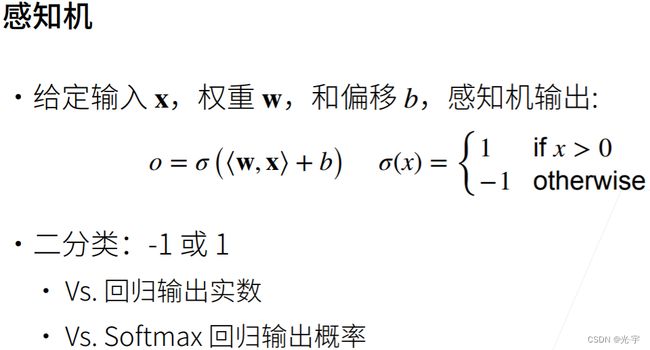
感知机与softmax比:
Softmax输出的是n个元素类别的概率,但感知机只有一个输出,它只能做二分类问题。
60年代的算法
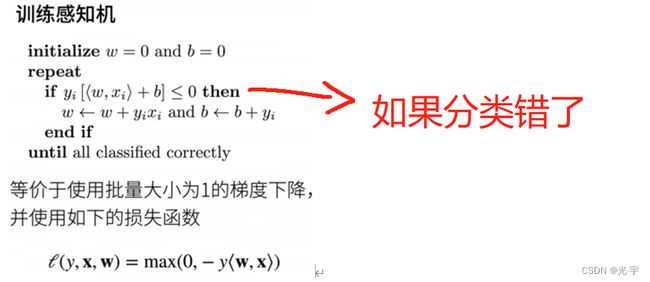
现代感知机算法
先看一个例子:

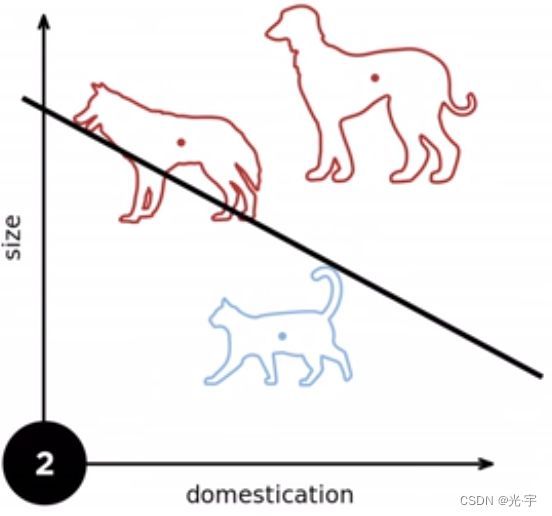
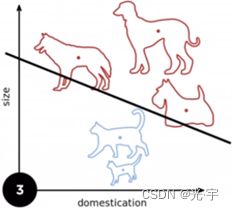
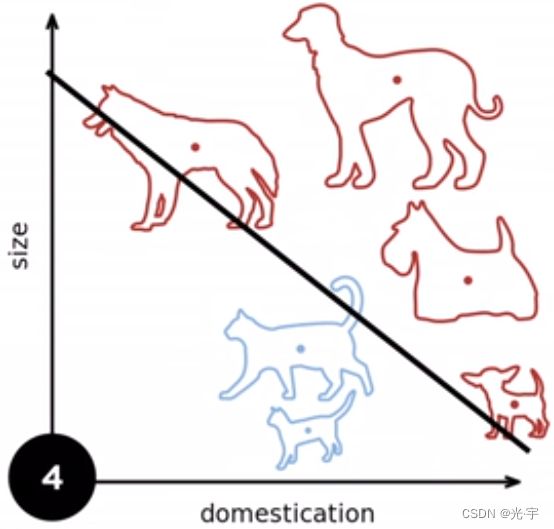
无论来几只狗,几只猫,我都要找到一条准确的“分界线”去将这两类动物进行分类,只是感知器的任务。下面介绍一下感知定理:
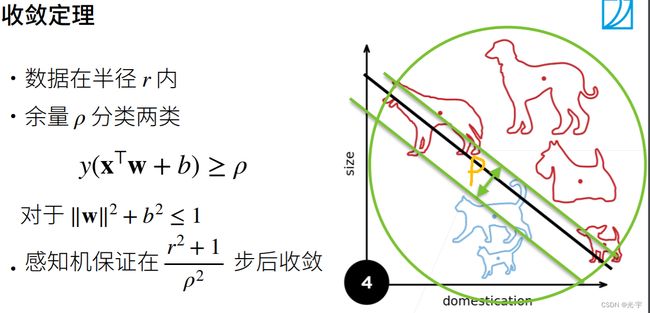
两条绿色平行线之间的区域是ρ,这表示的是分界线可以存在的区间,这个区间越大越好,越大就说明两类样本点隔得距离就越大,这样就越容易分类。我们可以看到最后那个收敛公式,是与半径和ρ有关的,当半径越小,ρ越大时它收敛的就越快。当然半径也不能一味的小。
感知机的问题:
感知机不能拟合XOR函数,它只能产生线性分割面。
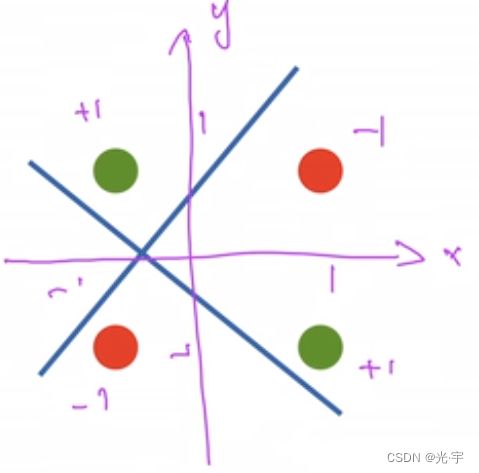
感知机不能拟合xor函数,因为它只能产生线性分割面,对于上图所示的数据分布,它无法对红绿进行分类。这就导致了AI的第一个寒冬。具体的历史大家可以参考这篇博客,写的非常好:https://www.cnblogs.com/subconscious/p/5058741.html
在之后的10-15年后,人们研究出了一种能够解决这个问题的办法,那就是——多层感知机。
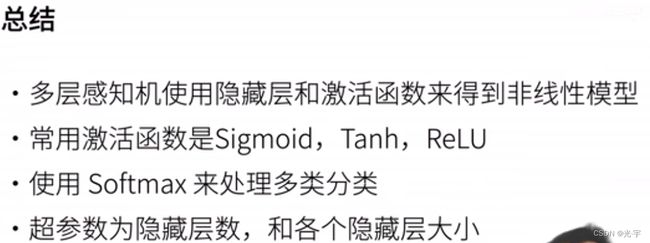
总结:
1、感知机是个二分类模型,是最早的AI模型之一;
2、它的求解算法等价于使用批量大小为1的梯度下降;
3、它不能拟合XOR函数,导致AI的第一次寒冬。
多层感知机
多层感知机处理XOR的方法:
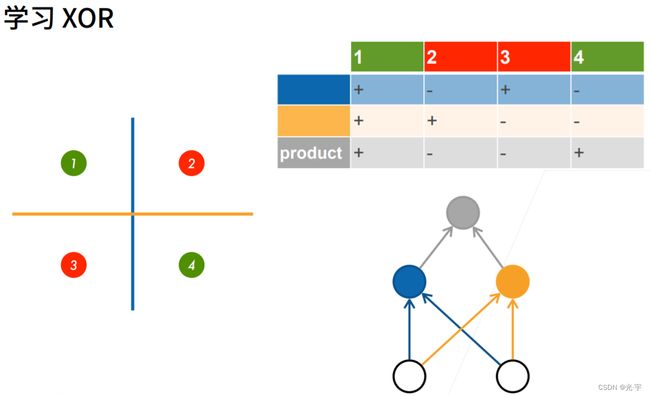
第一层感知机学习蓝线,第二层感知机学黄线,最后一层结合蓝线和黄线就可以得出正确结果了。
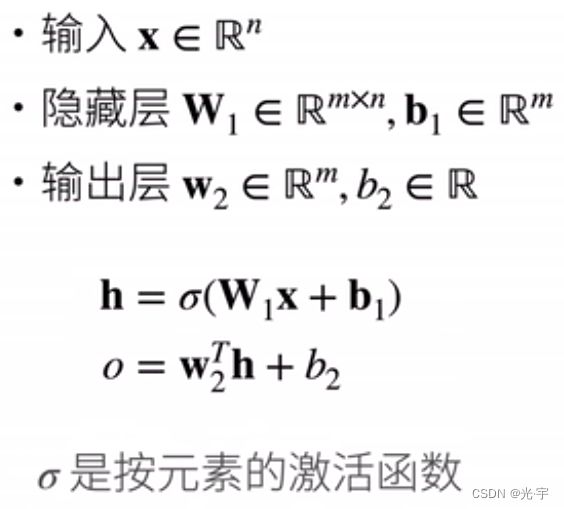
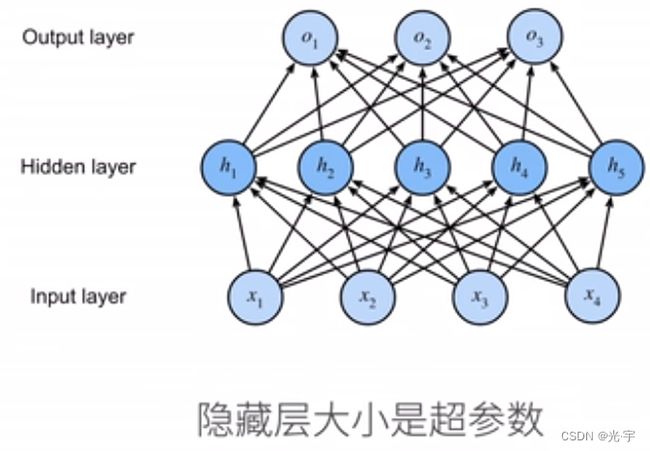
单隐藏层的多层感知机(单分类)
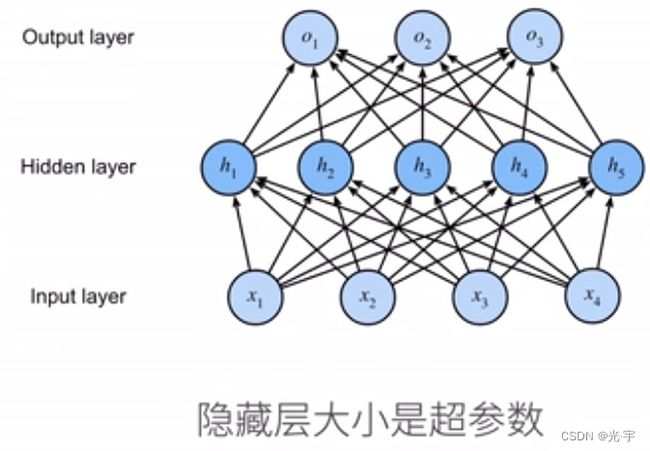
隐藏层有多大可以自己设置。
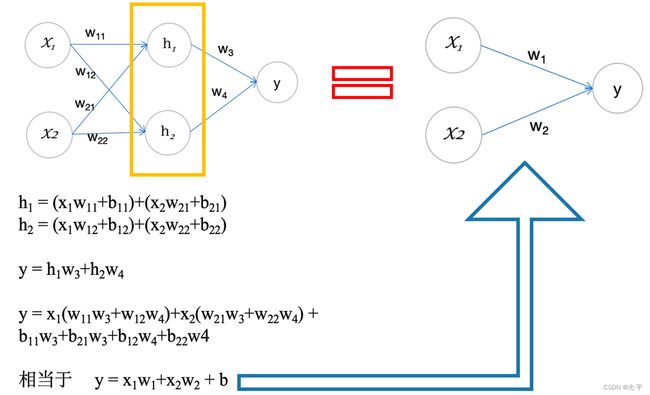
激活函数是非线性的是因为:如果激活函数是线性的话,输出会仍然是线性的,也就是说它会等价于一个单层的感知机。
(神经网络中激活函数的主要作用是提供网络的非线性建模能力,如不特别说明,激活函数一般而言是非线性函数。
假设一个神经网络中仅包含线性卷积和全连接运算,那么该网络仅能够表达线性映射,即便增加网络的深度也依旧还是线性映射,难以有效建模实际环境中非线性分布的数据。
加入非线性激活函数之后,深度神经网络才具备了分层的非线性映射学习能力。因此,激活函数是深度神经网络中不可或缺的部分。)
激活函数的选择
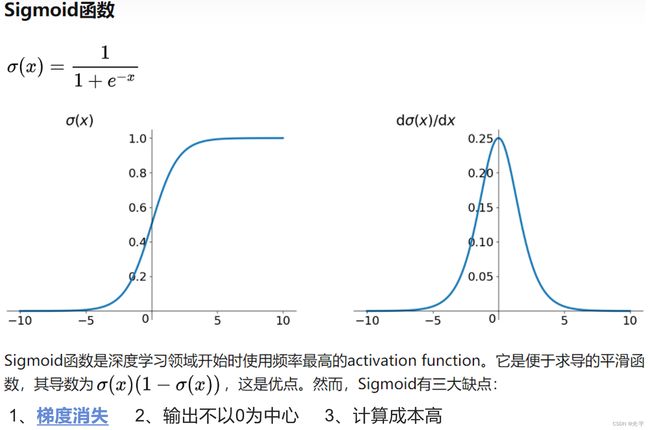
1、sigmoid激活函数
将输入投影到(0,1)中
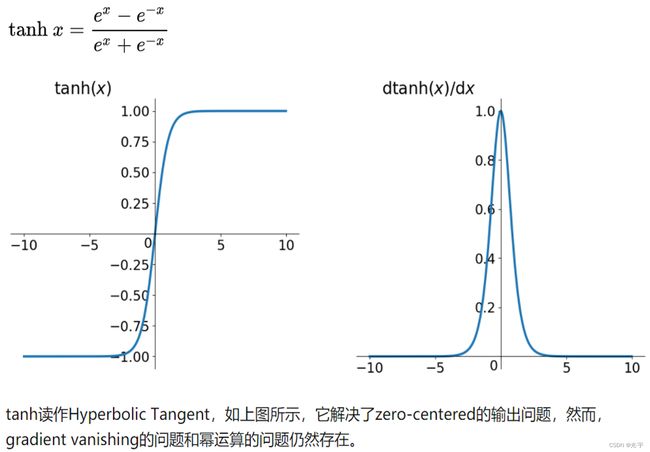
2、tanh函数
将输入投影到(-1,1)
3、relu函数
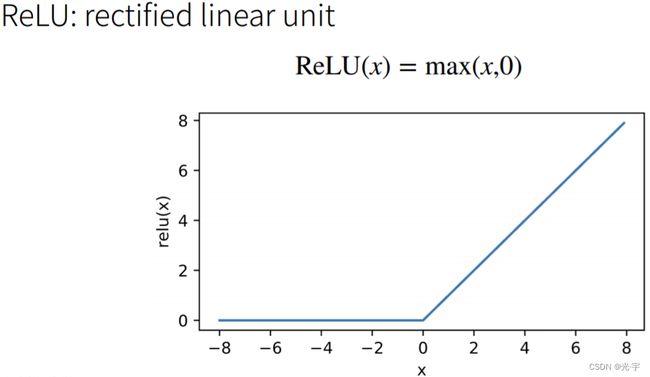
Relu的运算成本与前俩比很小。
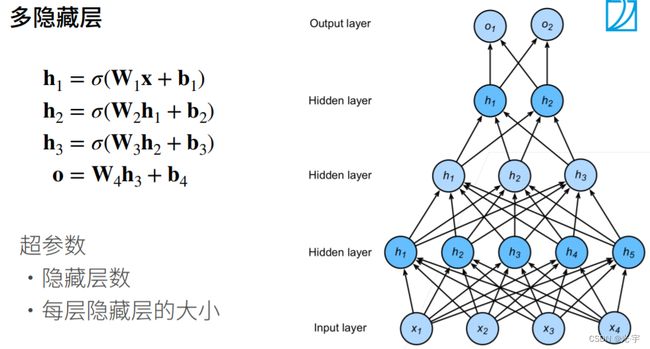
多隐藏层的多层感知机(多分类)
![]()

多分类感知机与softmax回归的原理是一样的,唯一的区别就是多层感知机比softmax回归多几层隐藏层。感知机如果我想要返回每个类别的置信度的话,那么它的返回就可以用softmax函数进行处理,这也就是softmax回归了。
如果数据比较复杂的话有两个选择:
第一个选择是单隐藏层,把单隐藏层的维度设高一些;
第二个选择是深化模型(多隐藏层)。
这里每个隐藏层维度的选择是有讲究的,比如下图的hidden layer2就不行,不能“先瘦再胖再瘦”,必须 “先胖再瘦”,因为前者在隐藏层1到隐藏层2的过程中可能会损失很多有用的信息,那么损失有用信息后再增加维度就没什么意义了。
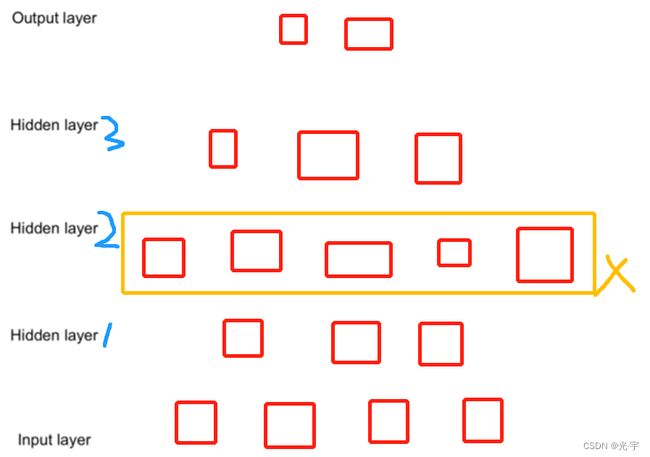
但是沐神说CNN可以有“先瘦再胖再瘦”这种情况,这样可以避免模型overfitting(过拟合)。
实践部分
从零开始:
代码:
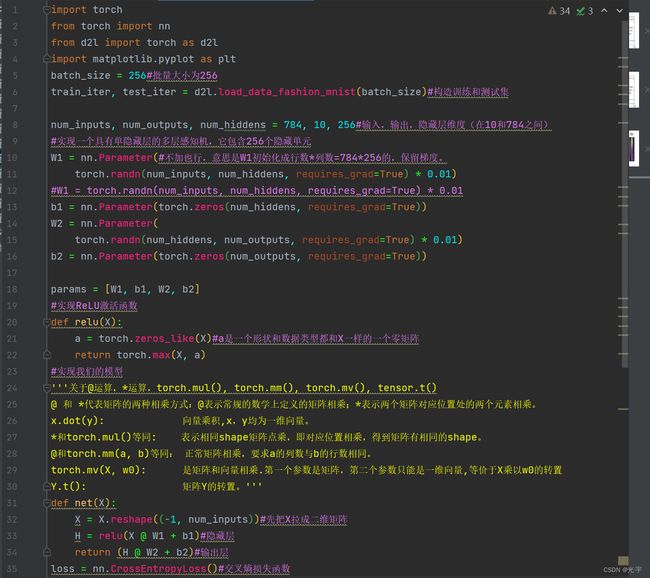
import torch
from torch import nn
from d2l import torch as d2l
import matplotlib.pyplot as plt
batch_size = 256#批量大小为256
train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size)#构造训练和测试集
num_inputs, num_outputs, num_hiddens = 784, 10, 256#输入,输出,隐藏层维度(在10和784之间)
#实现一个具有单隐藏层的多层感知机,它包含256个隐藏单元
W1 = nn.Parameter(#不加也行,意思是W1初始化成行数*列数=784*256的,保留梯度。
torch.randn(num_inputs, num_hiddens, requires_grad=True) * 0.01)
#W1 = torch.randn(num_inputs, num_hiddens, requires_grad=True) * 0.01
b1 = nn.Parameter(torch.zeros(num_hiddens, requires_grad=True))
W2 = nn.Parameter(
torch.randn(num_hiddens, num_outputs, requires_grad=True) * 0.01)
b2 = nn.Parameter(torch.zeros(num_outputs, requires_grad=True))
params = [W1, b1, W2, b2]
#实现ReLU激活函数
def relu(X):
a = torch.zeros_like(X)#a是一个形状和数据类型都和X一样的一个零矩阵
return torch.max(X, a)
#实现我们的模型
'''关于@运算,*运算,torch.mul(), torch.mm(), torch.mv(), tensor.t()
@ 和 *代表矩阵的两种相乘方式:@表示常规的数学上定义的矩阵相乘;*表示两个矩阵对应位置处的两个元素相乘。
x.dot(y): 向量乘积,x,y均为一维向量。
*和torch.mul()等同: 表示相同shape矩阵点乘,即对应位置相乘,得到矩阵有相同的shape。
@和torch.mm(a, b)等同: 正常矩阵相乘,要求a的列数与b的行数相同。
torch.mv(X, w0): 是矩阵和向量相乘.第一个参数是矩阵,第二个参数只能是一维向量,等价于X乘以w0的转置
Y.t(): 矩阵Y的转置。'''
def net(X):
X = X.reshape((-1, num_inputs))#先把X拉成二维矩阵
H = relu(X @ W1 + b1)#隐藏层
return (H @ W2 + b2)#输出层
loss = nn.CrossEntropyLoss()#交叉熵损失函数
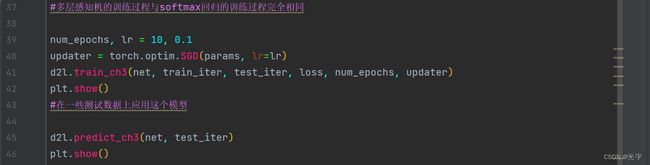
#多层感知机的训练过程与softmax回归的训练过程完全相同
num_epochs, lr = 10, 0.1
updater = torch.optim.SGD(params, lr=lr)
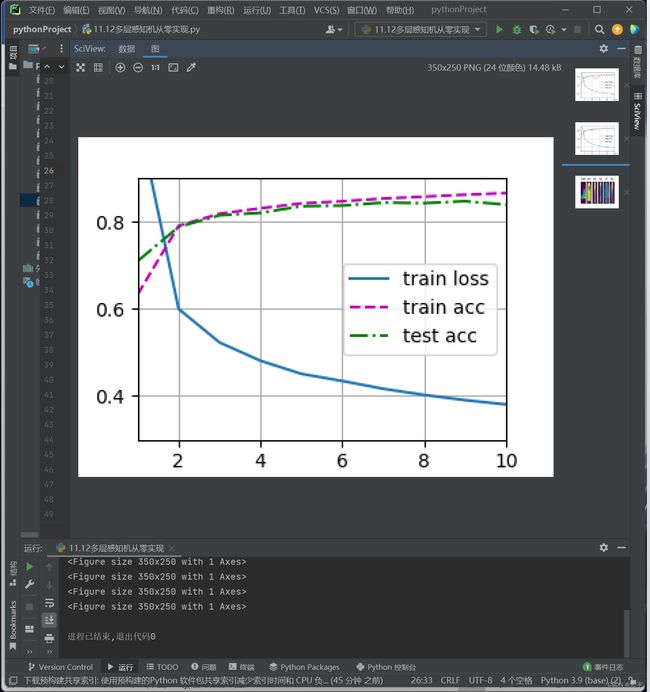
d2l.train_ch3(net, train_iter, test_iter, loss, num_epochs, updater)
plt.show()
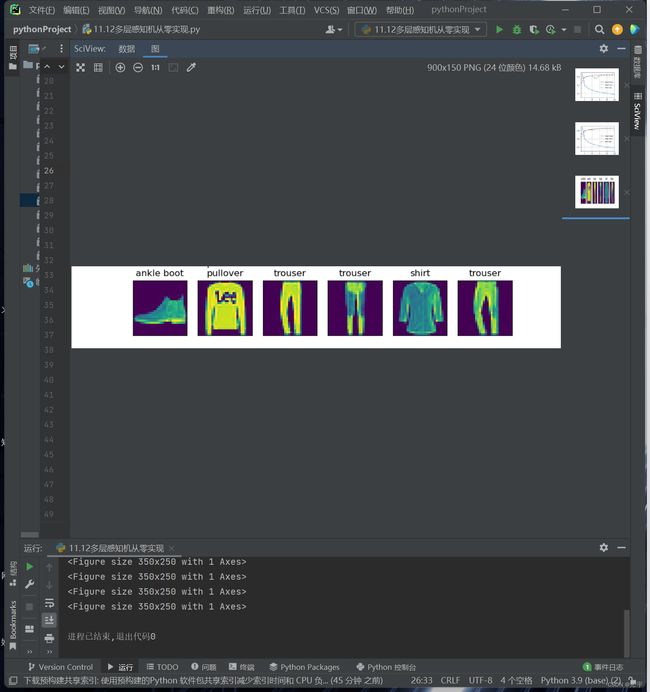
#在一些测试数据上应用这个模型
d2l.predict_ch3(net, test_iter)
plt.show()简洁实现:
代码:
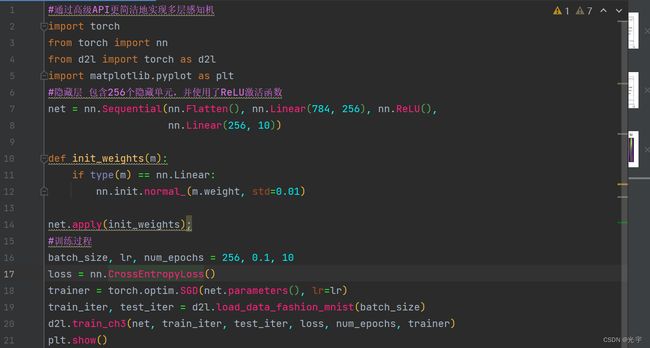
#通过高级API更简洁地实现多层感知机
import torch
from torch import nn
from d2l import torch as d2l
import matplotlib.pyplot as plt
#隐藏层 包含256个隐藏单元,并使用了ReLU激活函数
net = nn.Sequential(nn.Flatten(), nn.Linear(784, 256), nn.ReLU(),
nn.Linear(256, 10))
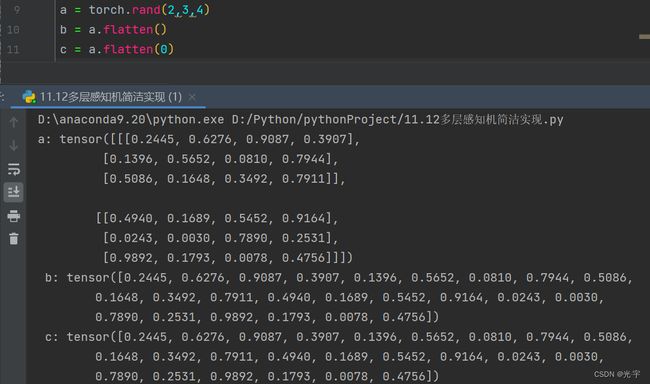
a = torch.rand(2,3,4)
b = a.flatten()
c = a.flatten(0)
print('a:',a,'\n','b:',b,'\n','c:',c)
def init_weights(m):
if type(m) == nn.Linear:
nn.init.normal_(m.weight, std=0.01)
net.apply(init_weights);
#训练过程
batch_size, lr, num_epochs = 256, 0.1, 10
loss = nn.CrossEntropyLoss()
trainer = torch.optim.SGD(net.parameters(), lr=lr)
train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size)
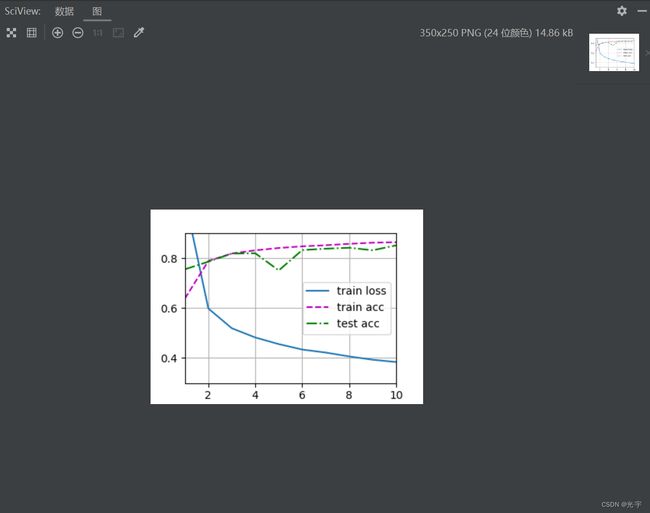
d2l.train_ch3(net, train_iter, test_iter, loss, num_epochs, trainer)
plt.show()
Flatten的用法: