【opencv3.0】鱼眼图像畸变校正——标定校正
前两天发表的时候没注意,代码出了点错误,所以修改了一下,重新发上来。
参考:
http://docs.opencv.org/3.0.0/db/d58/group__calib3d__fisheye.html#gga91b6a47d784dd47ea2c76ef656d7c3dca0899eaa2f96d6eed9927c4b4f4464e05
http://docs.opencv.org/master/modules/calib3d/doc/calib3d.html
opencv3.0 fisheye model reference
http://stackoverflow.com/questions/31089265/what-are-the-main-references-to-the-fish-eye-camera-model-in-opencv3-0-0dev/34388476#34388476
Kannala J, Brandt S S. A generic camera model and calibration method for conventional, wide-angle, and fish-eye lenses[J]. Pattern Analysis and Machine Intelligence, IEEE Transactions on, 2006, 28(8): 1335-1340.
文献地址:http://download.csdn.net/detail/qq_15947787/9583006
OpenCV也是参考matlab的Calib_gui_fisheye处理,但是不清楚为什么,Calib_gui_fisheye不能准确的提取角点
鱼眼镜头模型
鱼眼镜头的内参模型可以表示为  ,与普通镜头的内参一样,但畸变参数不同,为
,与普通镜头的内参一样,但畸变参数不同,为 ,含义如下:
,含义如下:
设(X,Y,Z)为一个三维坐标点,投影在图像上的二维坐标为(u,v),如果不考虑畸变,投影关系如下:
R和t分别代表相机外参中的旋转矩阵和平移向量。

标定流程
首先调用OpenCV的FindChessboardCorners()来寻找图像上的标定板的角点,再根据标定板的尺寸指定这些角点对应的三维点的三维坐标,再调用fisheye::calibrate()来进行标定,利用标定结果中的内参和畸变参数调用fisheye::undistortImage()对图像做去畸变操作。最后调用一张待测试的畸变图片利用标定结果进行畸变校正。
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
实验结果:
第1幅图像的平均误差:0.0255382像素
第2幅图像的平均误差:0.0325026像素
第3幅图像的平均误差:0.0244082像素
第4幅图像的平均误差:0.0311312像素
第5幅图像的平均误差:0.0205482像素
第6幅图像的平均误差:0.0385998像素
第7幅图像的平均误差:0.0423178像素
第8幅图像的平均误差:0.0442407像素
第9幅图像的平均误差:0.0396359像素
第10幅图像的平均误差:0.0337944像素
第11幅图像的平均误差:0.0294888像素
第12幅图像的平均误差:0.0391749像素
第13幅图像的平均误差:0.0589933像素
第14幅图像的平均误差:0.0239711像素
第15幅图像的平均误差:0.0267404像素
第16幅图像的平均误差:0.0298319像素
第17幅图像的平均误差:0.0346551像素
第18幅图像的平均误差:0.0538333像素
第19幅图像的平均误差:0.0385998像素
第20幅图像的平均误差:0.0485061像素
第21幅图像的平均误差:0.0441557像素
第22幅图像的平均误差:0.0541894像素
第23幅图像的平均误差:0.0299604像素
第24幅图像的平均误差:0.0385502像素
第25幅图像的平均误差:0.0226273像素
总体平均误差:0.0362398像素
相机内参数矩阵:
[322.4122272795701, 0, 626.3428871332725;
0, 322.6954347937962, 502.2060247826215;
0, 0, 1]
畸变系数:
[-0.0314732, 0.00545013, -0.00336236, 0.000262814]
第1幅图像的旋转向量:
[-3.03815, 0.388065, -0.0138772]
第1幅图像的旋转矩阵:
[0.9679029375838276, -0.2506097001682914, 0.01893889115435969;
-0.2513223502463919, -0.9648466048558239, 0.07686420080128105;
-0.0009897894864664397, -0.07915685238656738, -0.9968616819985727]
第1幅图像的平移向量:
[-36.6125, 83.2967, 169.266]
第2幅图像的旋转向量:
[-2.32548, 1.54006, 0.40201]
第2幅图像的旋转矩阵:
[0.378521586564022, -0.9239226330487051, -0.05557316479564789;
-0.8332059579221207, -0.3662733126966977, 0.4142604157885093;
-0.4030995412899122, -0.1105026178266161, -0.908460197953288]
第2幅图像的平移向量:
[63.1312, -57.5069, 165.236]
第3幅图像的旋转向量:
[2.44823, -1.67407, 0.725759]
第3幅图像的旋转矩阵:
[0.2871968675132958, -0.8984517932453987, 0.3321179526985517;
-0.8565648483398981, -0.3960822205235546, -0.3307801916281831;
0.4287360725189769, -0.1894815289131304, -0.8833357970340301]
第3幅图像的平移向量:
[9.19866, 173.995, 164.369]
第4幅图像的旋转向量:
[-2.92706, 0.182327, -0.805427]
第4幅图像的旋转矩阵:
[0.8529147476243522, -0.08859570292138545, 0.5144776328556494;
-0.1416154555912262, -0.9878071991931738, 0.06466838454629012;
0.502475368573004, -0.1280146032529221, -0.8550618488340014]
第4幅图像的平移向量:
[-114.612, 29.7974, 148.561]
第5幅图像的旋转向量:
[-2.94241, 0.292916, 0.443054]
第5幅图像的旋转矩阵:
[0.9372522606978974, -0.2140932338616103, -0.2751768286599686;
-0.1693276205911718, -0.969441300775839, 0.1775154113168249;
-0.3047726311885831, -0.1197816829265942, -0.9448629486405216]
第5幅图像的平移向量:
[83.013, 73.6934, 241.275]
第6幅图像的旋转向量:
[-2.75668, -1.001, -0.612898]
第6幅图像的旋转矩阵:
[0.6946906160764714, 0.6411847485001515, 0.326016972297594;
0.5818913059604812, -0.7673820777792599, 0.2693088464027711;
0.4228563065426579, 0.002620113353144188, -0.9061929590452126]
第6幅图像的平移向量:
[-156.079, -54.4814, 152.871]
第7幅图像的旋转向量:
[-2.83598, -0.88453, -0.738399]
第7幅图像的旋转矩阵:
[0.7170926483253193, 0.5539372902422747, 0.4230030876918346;
0.5151514661855453, -0.8300409149112951, 0.213661055085159;
0.4694646958022115, 0.06469588899046283, -0.8805778451352673]
第7幅图像的平移向量:
[-123.099, -60.5503, 92.6496]
第8幅图像的旋转向量:
[-2.94589, 0.176748, -0.583872]
第8幅图像的旋转矩阵:
[0.9181256495730359, -0.08877720787035021, 0.3862174244630025;
-0.1403284549278882, -0.9842687480550225, 0.1073450340712148;
0.3706119484496446, -0.1527535235761953, -0.9161403520757148]
第8幅图像的平移向量:
[-65.3965, 65.5516, 93.5776]
第9幅图像的旋转向量:
[-2.98668, 0.512548, 0.0276313]
第9幅图像的旋转矩阵:
[0.9427996228264289, -0.3333589160928895, 0.0008392018329849635;
-0.3313366658414531, -0.9367974551508381, 0.1123678863910088;
-0.03667267466945741, -0.1062184592445554, -0.9936663191677078]
第9幅图像的平移向量:
[25.637, 36.055, 149.153]
第10幅图像的旋转向量:
[-2.64713, 0.908772, 0.463857]
第10幅图像的旋转矩阵:
[0.7472614296825292, -0.6330773665259889, -0.202023275147545;
-0.5349933296317385, -0.7534557166822899, 0.3822127944592156;
-0.3941858609315764, -0.1775317745962544, -0.9017205642827143]
第10幅图像的平移向量:
[57.5034, -40.0235, 123.005]
第11幅图像的旋转向量:
[2.97099, 0.81535, -0.234947]
第11幅图像的旋转矩阵:
[0.8492655838870934, 0.5110771946433385, -0.1324691252345593;
0.503201513260689, -0.8594801895012334, -0.08990017189681285;
-0.1598005165106387, 0.009690457699146879, -0.9871017627137103]
第11幅图像的平移向量:
[3.82139, 101.52, 152.074]
第12幅图像的旋转向量:
[-2.86077, 0.432068, -0.546188]
第12幅图像的旋转矩阵:
[0.8891914447529974, -0.2460402134947138, 0.3857496440977657;
-0.3187574034884554, -0.9379532461778478, 0.1365189573126591;
0.3282259774901665, -0.2443520438382157, -0.9124471416869645]
第12幅图像的平移向量:
[-68.367, 122.421, 113.478]
第13幅图像的旋转向量:
[-2.90951, -0.523456, -0.663067]
第13幅图像的旋转矩阵:
[0.8449852726290712, 0.3552543160840582, 0.39974274220256;
0.3063658779533411, -0.9342262591823131, 0.1826506104016627;
0.4383375843637559, -0.03186953965575178, -0.8982452307562103]
第13幅图像的平移向量:
[-94.5581, 9.47137, 65.9367]
第14幅图像的旋转向量:
[-2.76209, 0.958866, -0.22678]
第14幅图像的旋转矩阵:
[0.7766776415625997, -0.5931753322324745, 0.2119312773699317;
-0.6252672489575734, -0.7667435817622675, 0.1454137105206963;
0.07624112064880313, -0.2454532645072427, -0.9664057049008724]
第14幅图像的平移向量:
[24.2611, 88.5081, 199.387]
第15幅图像的旋转向量:
[-2.84249, 0.0876038, -0.180569]
第15幅图像的旋转矩阵:
[0.9902889632803219, -0.04179158984697147, 0.1325942390273699;
-0.07827787950080752, -0.9558115385084162, 0.2833670348417959;
0.1148927447058423, -0.2909944430263867, -0.9498009745950575]
第15幅图像的平移向量:
[-6.92544, 32.624, 260.476]
第16幅图像的旋转向量:
[-2.17961, -1.94061, -0.409744]
第16幅图像的旋转矩阵:
[0.1026106120077555, 0.9917855891805973, 0.07637019966642694;
0.9380038094599215, -0.1220286791600962, 0.3244346696965635;
0.3310889846281055, 0.03834509820222493, -0.9428200982699678]
第16幅图像的平移向量:
[-55.2808, -83.903, 214.285]
第17幅图像的旋转向量:
[-2.21555, -0.438635, -0.150732]
第17幅图像的旋转矩阵:
[0.9312004456805553, 0.3620443217263547, -0.04230412592218191;
0.2595653905931794, -0.5771436506885823, 0.7742938812079467;
0.2559131453648801, -0.7320034942372609, -0.6314106005238542]
第17幅图像的平移向量:
[-64.4695, -103.74, 235.816]
第18幅图像的旋转向量:
[-2.97812, 0.0864579, -0.700192]
第18幅图像的旋转矩阵:
[0.8938975219841372, -0.03636454892238611, 0.4467939567320607;
-0.07340853688611149, -0.9951239589453907, 0.06587482861528146;
0.4422198626281497, -0.09168383671358701, -0.8922083092992448]
第18幅图像的平移向量:
[-86.0809, 61.0628, 69.4594]
第19幅图像的旋转向量:
[-3.00008, 0.239955, 0.155099]
第19幅图像的旋转矩阵:
[0.9820966811162741, -0.1644457693799922, -0.09188959611088617;
-0.1513134378357853, -0.9792000888366407, 0.1351718519242486;
-0.1122067398631442, -0.118847696466265, -0.9865520120976629]
第19幅图像的平移向量:
[-15.7077, 32.6659, 127.149]
第20幅图像的旋转向量:
[-2.95971, 0.562952, 0.361615]
第20幅图像的旋转矩阵:
[0.9030375888807793, -0.3736248978488473, -0.2119611963917617;
-0.3481253492941344, -0.9256202897130543, 0.1484446713437644;
-0.2516582091790878, -0.06026205256178804, -0.9659382127102203]
第20幅图像的平移向量:
[41.3163, 10.388, 118.481]
第21幅图像的旋转向量:
[-2.79374, 0.881471, 0.164568]
第21幅图像的旋转矩阵:
[0.8152064293359687, -0.5775133587591865, -0.04378125196911152;
-0.554407144845817, -0.7999860287028848, 0.22946692926018;
-0.1675446069356131, -0.1627902771509103, -0.9723312863175394]
第21幅图像的平移向量:
[-31.4756, 3.75149, 134.514]
第22幅图像的旋转向量:
[-2.98309, 0.637638, 0.0981236]
第22幅图像的旋转矩阵:
[0.9108160328030114, -0.4104565740919268, -0.04404038117117651;
-0.4047071445053953, -0.9088735260558214, 0.1008019881805276;
-0.08140197525412385, -0.07398861006652813, -0.9939312873660584]
第22幅图像的平移向量:
[85.0147, 158.892, 162.763]
第23幅图像的旋转向量:
[2.84253, -1.05597, -0.348542]
第23幅图像的旋转矩阵:
[0.7350751148451006, -0.6328998562959699, -0.2431097436056436;
-0.6532645704372982, -0.7571181193324142, -0.004189795928232765;
-0.1814110706292024, 0.1618947969487858, -0.9699897412725961]
第23幅图像的平移向量:
[99.5097, 185.972, 139.866]
第24幅图像的旋转向量:
[2.69949, -1.26373, -0.371771]
第24幅图像的旋转矩阵:
[0.6171775811411872, -0.735612817963387, -0.2792232357535401;
-0.7696284157724025, -0.6381835525130317, -0.01984577883350193;
-0.1635968672449875, 0.227146506356165, -0.9600211089751176]
第24幅图像的平移向量:
[122.42, 183.516, 123.981]
第25幅图像的旋转向量:
[2.73412, 0.903944, -0.920859]
第25幅图像的旋转矩阵:
[0.6369387495798474, 0.5748277850836829, -0.5136945072506112;
0.5029505052567296, -0.8148489726280646, -0.2882046860635478;
-0.5842515028184876, -0.07479417960493308, -0.8081188106655877]
第25幅图像的平移向量:
[38.5595, 196.165, 166.877]
畸变图像角点检测与校正结果:(只列出一部分)


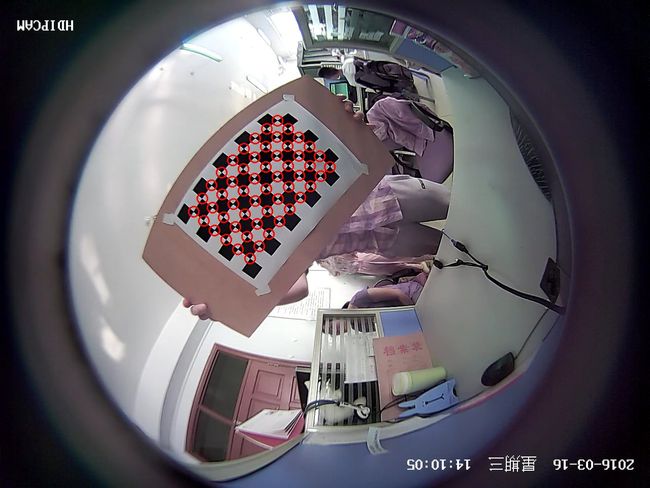




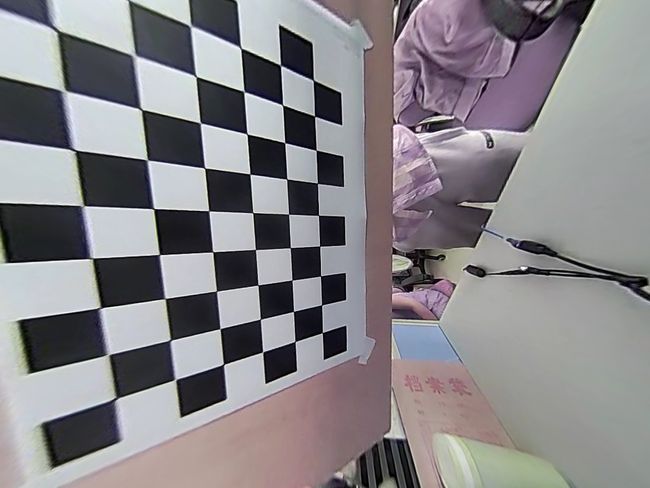


对了200°视场的鱼眼图像效果还是很好的。
后面的校正图出现拉伸很严重的原因是因为标定板拍摄的时候是倾斜的,并不与光轴垂直。所以会出现近大远小的情况,也就是拉伸的情况。可以这么理解,把这些校正图中的棋盘位置看成无数连续的垂直于光轴的标定板,由于透视效果,远处的格子自然小,近处的会大,连续后就会成为这种现象,虽然人眼感觉怪怪的,但是符合空间分布情况。可以想象一下隧道里的情况,下图还是一个小视场的图,墙上格子变化很明显,如果视场更大一些,就更明显了。

代码下载:
附件中删除了部分图像(有脸的图都删了……^-^)
http://download.csdn.net/detail/qq_15947787/9527601
2016/10/24 23:00重新装上了VS2013和OPENCV3.0,简单修改了下代码,删除了一些没必要的变量,做了简单优化,另外感觉损失原有图像信息的方法,也间接得到改善,不需要修改参数,可以直接运行。//以下三行为需要手动修改的参数 int image_count= 14;//图像数量 Size board_size = Size(9,6);//定标板上每行、列的角点数 int x_expand = 0,y_expand = 200;//x,y方向的扩展(x横向,y纵向),适当增大可以不损失原图像信息
(这里的链接删除了)
2016/12/2 20:00在做双目标定及空间点计算时,突然看到stereoRectify有一个alpha参数,可以调节校正图的大小,而initUndistortRectifyMap中的size是校正图的大小,并不是原图大小,这样应该就好办了吧。
还有一个是在http://blog.csdn.net/dip007/article/details/51498644看到了方法,在这里谢谢他,直接把上面代码的最后一部分替代即可,代码如下
懒得复制的可以直接下载
http://download.csdn.net/detail/qq_15947787/9700379
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
2016/12/8 17:00其实主点坐标调节一下比较好,将他置于校正图中心处,把最后一段代码改成这样,在原文的代码直接改就可以,从上面的链接下载的直接改也可以
opencv2中没有鱼眼模型,opencv3中才加入Fisheye camera model by Ilya Krylov,opencv3新加入的功能见链接http://blog.csdn.net/qq_15947787/article/details/50778609