【无人驾驶】“自主代客泊车”概述 1
L4级无人驾驶
前段时间谷歌开始在美国测试L4级无人驾驶车,英国最近也宣布什望能够在2019年让无人驾驶车开始上路,自动驾驶正在离人们的生活越来越近。但我们同时也知道,尽管L4级无人驾驶车开始上路,仍然是有限制条件的。要想用手机叫到一辆Waymo的无人驾驶网约车,等到项目正式启动的时候也只有少数人才有这个条件。因而,要真正让自动驾驶开始落地,选对场景很重要。
什么是自主代客泊车(AVP)?
自主代客泊车系统(AVP)用于实现从停车场入口/出口到停车位之间这一特定区域内完全自主的车辆自动驾驶,因其行驶速度低以及特定运营场地能够最大程度保证安全的特性,被业内公认为是最先实现落地的L4级自动驾驶场景。图 1.1为自主代客泊车应用的场景示意图。
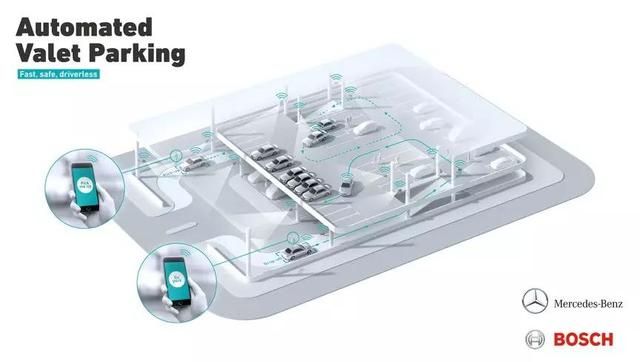
图 1.1自主代客泊车应用场景概念图
“自主代客泊车”应用场景
“自主代客泊车”,简单来说,就是在手机App上按下停车的命令,车辆就可以自动从下车区开到停车场里,并自己找到车位停好,当车主需要的时候,再次从App上发出命令,车辆会自动回到上车区。整个过程没有人的参与,是一个典型的限定范围内低速无人驾驶应用场景。
限定范围内、低速这两个条件一直被业内认为是最适合用来进行自动驾驶商业化,符合这两个条件的“自主代客泊车”可以么?
APA与AVP两个概念
澄清两个概念,一个是Level 2的自动泊车,也就是Automated Parking Assist,简称APA,主要是完成了最后五米的控制问题;另外一个是Level 4的自主泊车,Autonomous Valet Parking,简称AVP,实现的是在一定区域内的无人驾驶功能。实际上我们公司是在同步开发APA和AVP两个功能,其中里面的很多的设计和架构都是可复用的。一方面我们的APA具备和Level 4一致的设计标准,具备良好的可扩展性和升级能力;另一方面APA的量产为我们积累宝贵的产品化经验和大量的测试用例。
自主代客泊车”进行技术分解
如果要对“自主代客泊车”进行技术分解,可以简单分为两个部分:
1.通讯部分,要能够在手机App、停车场云平台和车辆之间进行通讯,App要向云平台发送停车和取车需求,停车场需要分配停车位给汽车;
2.执行部分,车辆接收到分配的停车位信息之后,开启自动驾驶模式,进行路径规划到最终停到停车位上。
如果要对“自主代客泊车”进行技术分解,可以简单分为两个部分:


自主代客泊车项目演示

自主代客泊车演示
长安新CS75,最为吸睛的地方在于其搭载了L2级自动驾驶核心技术APA4.0代客泊车系统。该系统,全程基本不需要驾驶员操控车辆,系统即可实现主动搜索车位、一键泊车、遥控泊车等功能,适用于水平泊车、垂直泊车、斜列式泊车、水平泊出等场景。
。


 现有AVP的方案有哪些?
现有AVP的方案有哪些?
目前,国内外互联网科技巨头、传统车企和创业公司纷纷投身汽车智能化变革,提出了多种自动化驾驶解决方案实现自主代客泊车,可大致分为以下两类:
以场端改造为主的技术方案:该方案将激光雷达、UWB等传感器安装在停车场,车辆仅需具备电子制动、自动换挡、电子助力转向及远程互联功能即可。但由于其场端改造的建设和维护成本较高,目前仅有一些示范性演示,难以大规模推广。
以车端改造为主的技术方案:该方案主要利用车载视觉或激光雷达等传感器用于高精度建图、定位和障碍物检测。其不足之处为:依赖高精度地图,需要专业地图供应商介入,采集和更新地图成本高,短期内商务及运营压力大。此外,激光雷达的价格昂贵。
在车辆之外的基础设施建设
不依靠单车智能意味着,在车辆之外的基础设施建设上,需要做大量的工作。这些工作包括:
1、在停车场内安置激光雷达,用以感知车辆位置以及车位是否可用。
2、为停车场配置一台算力强大的停车场管理服务器(GMS,Garage Management Server)。
3、基于WiFi建立车辆和停车场之间的通信,让双方彼此“心意相通”。
4、建立一个云平台,打通手机、车辆、停车场,提供安全验证等服务。
在双方分工中,上述的工作主要由博世完成,戴姆勒所做的工作集中在车辆的控制层面。,这一方案对车辆有较为全面的电子化要求,需要配备通信模块、电子转向、自动变速箱、无钥匙启动和自动制动能力,这些能力需要由车企去整合。此外,上述提到的对云端指令进行解析的软件,由双方联合研发,在量产时会被固化在车辆的ECU/域控制器中。
在整个方案中,技术明显更倚重于停车场基础设施,其原理像是停车场在场内布置“上帝视野”和“中枢大脑”,去指导无人车怎么开,而不是让车辆通过自身的能力像人类司机一样找车位。
关于自动驾驶

SAE International(国际汽车工程师协会)将自动驾驶技术分为L0、L1、L2、L3、L4、L5,总共六个等级,具体分法如下:
L0:代表没有任何自动驾驶加入的传统人类驾驶,汽车仅仅提出部分警告,如时速、与前车距离、盲区等方面的预警。
L1:方向盘和加减速提供一项自动操作,如自适应巡航或者车道保持等。
L2:方向盘和加减速提供两项自动操作,如自适应巡航+车道保持等。
以上三个级别都需要驾驶者监测环境,并且迅速作出决策,汽车本身仅仅拥有类似于“条件反射”的动作,不带有任何“思考”。
L3:系统自动作出所有驾驶操作,并且可以观察路况(如交通信号灯、行人、路边状况等),并能作出正确决策,但是系统的请求需要驾驶者提供应答。L3级别意味着系统已经有了初步的“思考能力”,大部分时间可以完全自动驾驶,只是需要人类来“保驾护航”,就好比驾校里的学员,已经可以开车上路,但是旁边需要坐着教练。
L4:系统自动作出所有驾驶操作,自主决策,并且驾驶者无需提供应答,但是一般限定其行驶区域,比如公交、物流、出租车等。L4级别意味着车俩可以完全自主上路,无需人类陪同,那么诸如方向盘、油门、刹车之类的装置也就可以取消了。
L5:全域自动驾驶。L5级的自动驾驶车就像我们人类的老司机一样,可以全地域、全天候的自动驾驶,熟练的应对地理、气候等环境的变化。