yolov5(pytorch)实现目标检测后输出检测框的位置信息
在yolov5检测目标后想要输出目标位置,在网上找了几个简称,都没有实现,第一个是让找到plot_one_box的这个函数,然后去修改,但是发现没有鸟用。
最后在一位博友哪里找到了正确的解决方法,
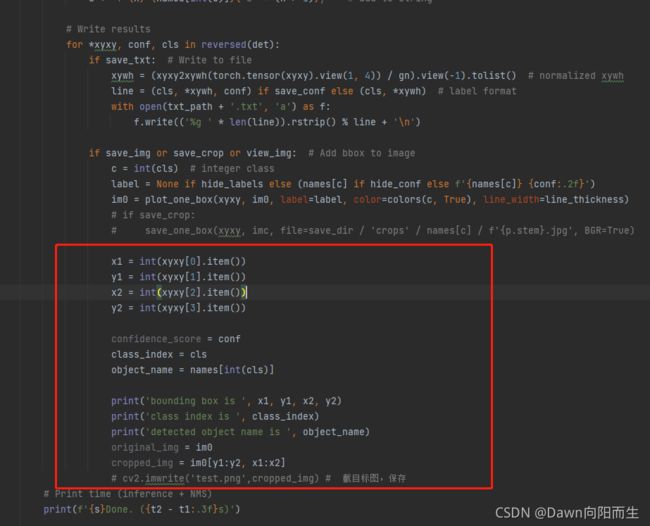
就是在detect.py文件夹下直接修改就行了,下面贴上图片
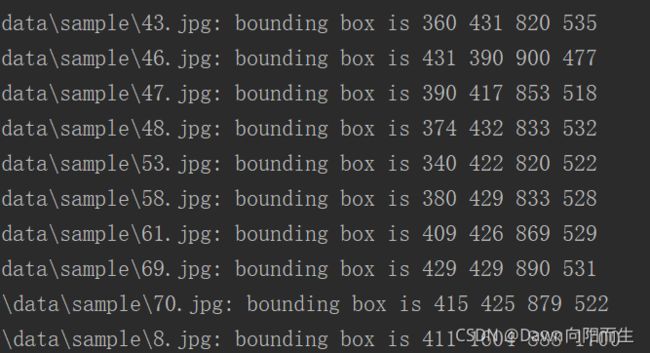
输出结果如下图
添加代码如下:
x1=int(xyxy[0].item())
y1=int(xyxy[1].item())
x2=int(xyxy[2].item())
y2=int(xyxy[3].item())
class_index=cls#获取属性
object_name=names[int(cls)]
print('bounding box is',x1,y1,x2,y2)#打印坐标
#print('class index is',class_index.item())#打印属性,由于我们只有一个类,所以是0
#print('object_names is',object_name)#打印标签名字,
注意:一定要把这两行代码注释掉,或者把上面的代码写在这两行代码的平级
if save_crop:
save_one_box(xyxy, imc, file=save_dir / 'crops' / names[c] / f'{p.stem}.jpg', BGR=True)