Opencv_10 图像的透视变换
文章目录
-
-
- 一. 透视变换的原理
- 二. 透视变换实现
-
- ① 函数原型
- ② 透视变换实现
- 三. 透视变换的案例
-
一. 透视变换的原理
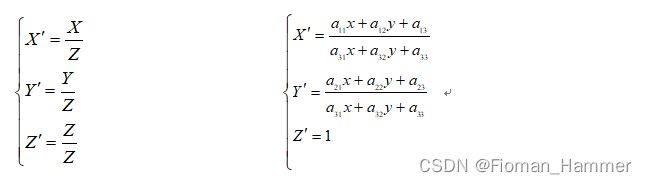
透视变换(Perspective Transformation)是将图片投影到一个新的视平面(Viewing Plance),也称为投影映射(Projective Mapping).通用的变换公式为:

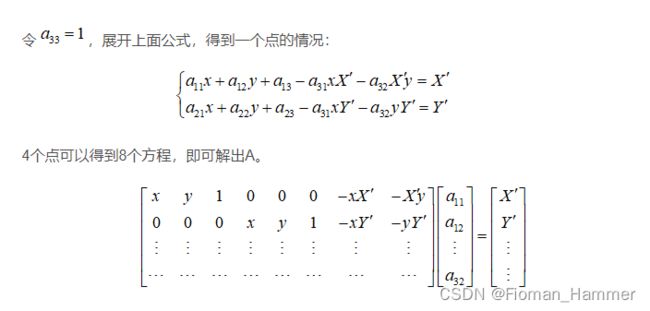
透视变换矩阵

(x,y,1)是原点, [X,Y,Z]是变换后的点位
这是一个二维空间变换到三维空间的转换,因为图像在二维平面,故除以Z
二. 透视变换实现
① 函数原型
Mat getPerspectiveTransform(const Point2f src[], const Point2f dst[],
int solveMethod = DECOMP_LU);
参数说明:
src[]:原图像中的四个像素坐标dst[]:目标图像中的四个像素点坐标solveMethod:选择计算透视变换矩阵方法的标志,可以选择参数以及含义在下表中
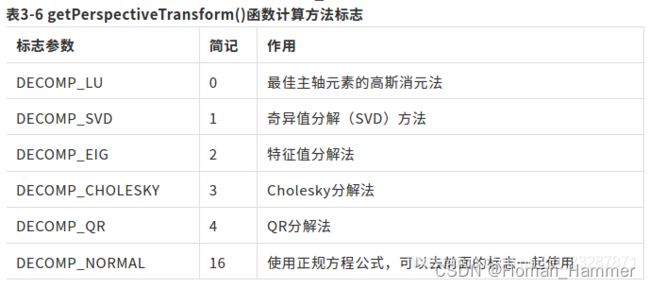
该函数两个输入量都是存放浮点坐标的数组,在生成数组的时候像素点的输入顺序没有要求,但是需要注意像素点的对应关系是一一对应的,函数的返回值是一个3*3的矩阵.最后一个参数是对应点坐标计算透视变换矩阵方法的选择标志,默认使用的是最佳主轴元素的高斯消元法DECOMP_LU
获取到透视变换矩阵以后,就可以进行透视变换了
void warpPerspective( InputArray src, OutputArray dst,
InputArray M, Size dsize,
int flags = INTER_LINEAR,
int borderMode = BORDER_CONSTANT,
const Scalar& borderValue = Scalar());
参数说明:
src:输入图像dst:输出图像M:3*3的变换矩阵dSize:输出图像的尺寸flags:插值方法标志boardMode:像素边界填充方式的标志boardValue:填充边界使用的数值,默认情况下是0
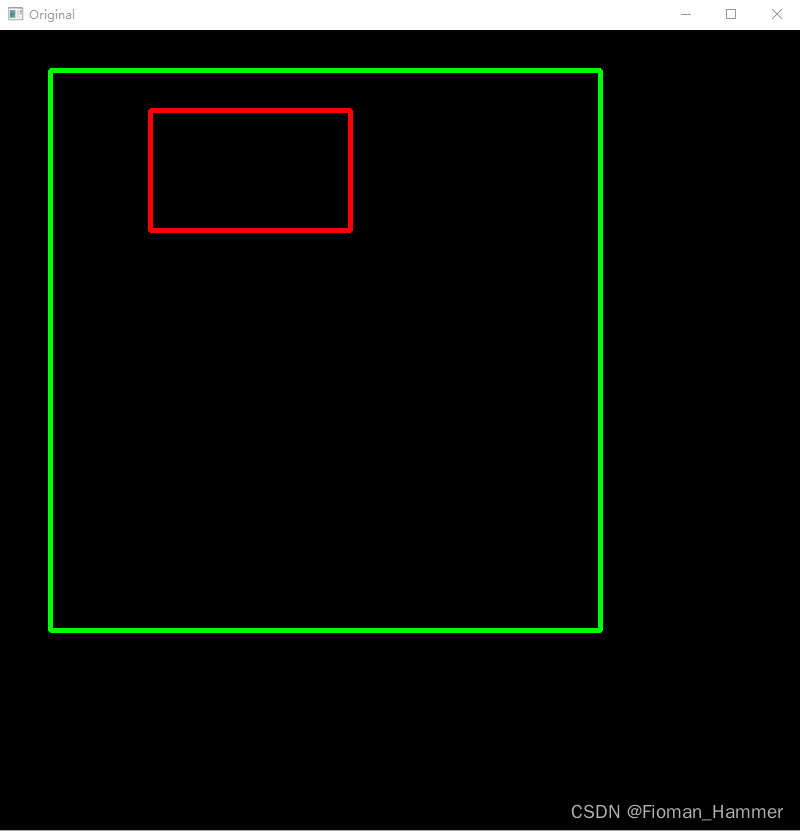
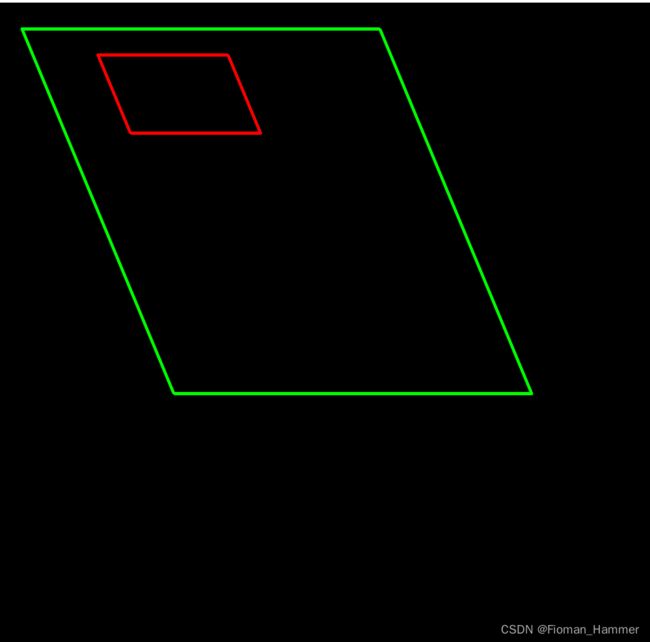
② 透视变换实现
#include"MyOpencv.h"
#include 结果:
三. 透视变换的案例

将这张图像摆正.用到的技术.
- 灰度处理,二值化,形态学操作行程连通域
- 轮廓发现,将目标的轮廓绘制出来
- 在绘制的轮廓中进行直线检测
- 找出4个边,求出四个交点
- 使用透视变换函数,得到结果
#include "MyOpencv.h"
#include 结果: