OpenCV_09 模版匹配和霍夫变换:霍夫线检测+霍夫圆检测
@[TOC]
1 模板匹配
1.1 原理
所谓的模板匹配,就是在给定的图片中查找和模板最相似的区域,该算法的输入包括模板和图片,整个任务的思路就是按照滑窗的思路不断的移动模板图片,计算其与图像中对应区域的匹配度,最终将匹配度最高的区域选择为最终的结果。
实现流程:
- 准备两幅图像:
1.原图像(I):在这幅图中,找到与模板相匹配的区域
2.模板(T):与原图像进行比对的图像块

- 滑动模板图像和原图像进行比对:

将模板块每次移动一个像素 (从左往右,从上往下),在每一个位置,都计算与模板图像的相似程度。 - 对于每一个位置将计算的相似结果保存在结果矩阵(R)中。如果输入图像的大小(WxH)且模板图像的大小(wxh),则输出矩阵R的大小为(W-w + 1,H-h + 1)将R显示为图像,如下图所示:

- 获得上述图像后,查找最大值所在的位置,那么该位置对应的区域就被认为是最匹配的。对应的区域就是以该点为顶点,长宽和模板图像一样大小的矩阵。
1.2 实现
我们使用OpenCV中的方法实现模板匹配。
API:
res = cv.matchTemplate(img,template,method)
参数:
- img: 要进行模板匹配的图像
- Template :模板
- method:实现模板匹配的算法,主要有:
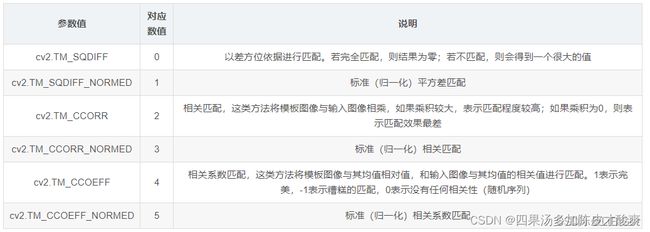
完成匹配后,使用cv.minMaxLoc()方法查找最大值所在的位置即可。如果使用平方差作为比较方法,则最小值位置是最佳匹配位置。
示例:
在该案例中,载入要搜索的图像和模板,图像如下所示:
import cv2 as cv
import numpy as np
from matplotlib import pyplot as plt
# 1 图像和模板读取
img = cv.imread('./src_data/mario.jpg')
template = cv.imread('./src_data/mario_coin.jpg')
# 获取模板的大小,之后用于主图像分块
h,w,l = template.shape
# 2 模板匹配
# 2.1 模板匹配
res = cv.matchTemplate(img, template, cv.TM_CCORR)
# 2.2 返回图像中最匹配的位置,确定左上角的坐标,并将匹配位置绘制在图像上
# cv::minMaxLoc 从一个矩阵中找出全局的最大值和最小值。
min_val, max_val, min_loc, max_loc = cv.minMaxLoc(res)
# 使用平方差时最小值为最佳匹配位置
top_left = max_loc
bottom_right = (top_left[0] + w, top_left[1] + h)
#绘制目标框 其目标框大小与
# cvRectangle(图像,矩形的一个顶点,矩形对角线上的另一个顶点,线条颜色,矩形的线条的粗细程度);
cv.rectangle(img, top_left, bottom_right, (0,255,0), 2)
# 3 图像显示
plt.imshow(img[:,:,::-1])
plt.title('匹配结果'), plt.xticks([]), plt.yticks([])
plt.show()

拓展:模板匹配不适用于尺度变换,视角变换后的图像。
我们就要使用关键点匹配算法,比较经典的关键点检测算法包括SIFT和SURF等,主要的思路是首先通过关键点检测算法获取模板和测试图片中的关键点;然后使用关键点匹配算法处理即可,这些关键点可以很好的处理尺度变化、视角变换、旋转变化、光照变化等,具有很好的不变性。
2 霍夫变换
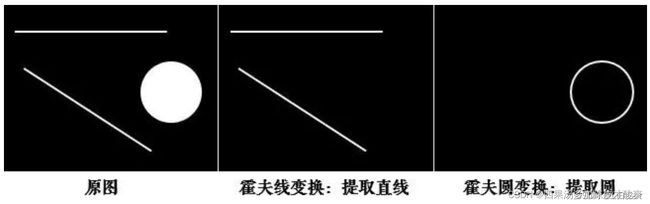
霍夫变换常用来提取图像中的直线和圆等几何形状,如下图所示:
2.1 原理
- 原理


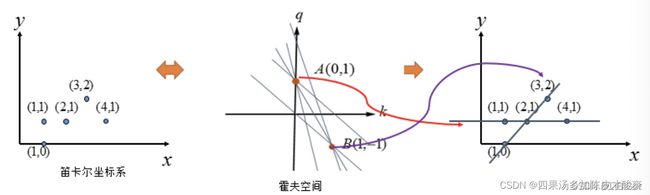
变换后的空间我们叫做霍夫空间。即:笛卡尔坐标系中的一条直线,对应于霍夫空间中的一个点。反过来,同样成立,霍夫空间中的一条线,对应于笛卡尔坐标系中一个点,如下所示:

我们再来看下A、B两个点,对应于霍夫空间的情形:

在看下三点共线的情况:

可以看出如果在笛卡尔坐标系的点共线,那么这些点在霍夫空间中对应的直线交于一点。
如果不止存在一条直线时,如下所示:

我们选择尽可能多的直线汇成的点,上图中三条直线汇成的A、B两点,将其对应回笛卡尔坐标系中的直线:
到这里我们似乎已经完成了霍夫变换的求解。但如果像下图这种情况时:

上图中的直线是x=2,那(k,q)怎么确定呢?
为了解决这个问题,我们考虑将笛卡尔坐标系转换为极坐标。

在极坐标下是一样的,极坐标中的点对应于霍夫空间的线,这时的霍夫空间是不在是参数(k,q)的空间,而是(ρ,θ)的空间,ρ是原点到直线的垂直距离,θ表示直线的垂线与横轴顺时针方向的夹角,垂直线的角度为0度,水平线的角度是180度。

我们只要求得霍夫空间中的交点的位置,即可得到原坐标系下的直线。
实现流程
假设有一个大小为100*∗100的图片,使用霍夫变换检测图片中的直线,则步骤如下所示:
- 直线都可以使用(ρ,θ) 表示,首先创建一个2D数组,我们叫做累加器,初始化所有值为0,行表示ρ ,列表示θ 。

该数组的大小决定了结果的准确性,若希望角度的精度为1度,那就需要180列。对于ρ,最大值为图片对角线的距离,如果希望精度达到像素级别,行数应该与图像的对角线的距离相等。 - 取直线上的第一个点(x,y),将其带入直线在极坐标中的公式中,然后遍历θ的取值:0,1,2,…,180,分别求出对应的ρ值,如果这个数值在上述累加器中存在相应的位置,则在该位置上加1.
- 取直线上的第二个点,重复上述步骤,更新累加器中的值。对图像中的直线上的每个点都直线以上步骤,每次更新累加器中的值。
- 搜索累加器中的最大值,并找到其对应的(ρ,θ),就可将图像中的直线表示出来。

2.2 霍夫线检测
在OpenCV中做霍夫线检测是使用的API是:
cv.HoughLines(img, rho, theta, threshold)
参数:
- img: 检测的图像,要求是二值化的图像,所以在调用霍夫变换之前首先要进行二值化,或者进行Canny边缘检测;
- rho、theta: ρ 和θ的精确度;
- threshold: 阈值,只有累加器中的值高于该阈值时才被认为是直线。
霍夫线检测的整个流程如下图所示,这是在stackflow上一个关于霍夫线变换的解释:

示例:
检测下述图像中的直线:
import numpy as np
import cv2 as cv
import matplotlib.pyplot as plt
# 1.加载图片,转为二值图
img = cv.imread('./DIP4E/letters-and-objects.tif')
# 函数cvCvtColor实现色彩空间转换。
gray = cv.cvtColor(img,cv.COLOR_BGR2GRAY)
# 在调用霍夫变换之前首先要进行二值化,或者进行Canny边缘检测
# cv.Canny 用于对图像的边缘检测
edges = cv.Canny(gray,50, 150)
# 2.霍夫直线变换
lines = cv.HoughLines(edges, 0.8, np.pi / 180, 150)
# 3.将检测的线绘制在图像上(注意是极坐标噢)
for line in lines:
# 极坐标转化直角坐标
rho, theta = line[0]
# 求解x与y点
a = np.cos(theta)
b = np.sin(theta)
x0 = a * rho
y0 = b * rho
# 将线延长
x1 = int(x0 + 1000 * (-b))
y1 = int(y0 + 1000 * (a))
x2 = int(x0 - 1000 * (-b))
y2 = int(y0 - 1000 * (a))
# 绘制直线
cv.line(img, (x1, y1), (x2, y2), (0, 255, 0))
# 4. 图像显示
plt.figure(figsize=(10, 8), dpi=100)
plt.imshow(img[:, :, ::-1]), plt.title('霍夫变换线检测')
plt.xticks([]), plt.yticks([])
plt.show()

2.3 霍夫圆检测[了解](霍夫梯度法)
- 原理

- API
在OpenCV中检测图像中的圆环使用的是API是:
circles = cv.HoughCircles(image, method, dp, minDist, param1=100, param2=100, minRadius=0,maxRadius=0 )
参数:
- image:输入图像,应输入灰度图像
- method:使用霍夫变换圆检测的算法,它的参数是CV_HOUGH_GRADIENT
- dp:霍夫空间的分辨率,dp=1时表示霍夫空间与输入图像空间的大小一致,dp=2时霍夫空间是输入图像空间的一半,以此类推
- minDist:圆心之间的最小距离,如果检测到的两个圆心之间距离小于该值,则认为它们是同一个圆心
- param1:边缘检测时使用Canny算子的高阈值,低阈值是高阈值的一半。
- param2:检测圆心和确定半径时所共有的阈值
- minRadius:所检测到的圆半径的最小值
- maxRadius:所检测到的圆半径的最大值
返回:
- circles:输出圆向量,包括三个浮点型的元素——圆心横坐标,圆心纵坐标和圆半径
- 实现
由于霍夫圆检测对噪声比较敏感,所以首先对图像进行中值滤波。
import cv2 as cv
import numpy as np
import matplotlib.pyplot as plt
# 1 读取图像,并转换为灰度图
planets = cv.imread("./DIP4E/washers.tif")
gay_img = cv.cvtColor(planets, cv.COLOR_BGRA2GRAY)
# 2 进行中值模糊,去噪点
img = cv.medianBlur(gay_img, 7)
# 3 霍夫圆检测
circles = cv.HoughCircles(img, method=cv.HOUGH_GRADIENT,
dp=1, minDist=200, param1=100, param2=30, minRadius=0, maxRadius=100)
# 4 将检测结果绘制在图像上
for i in circles[0, :]: # 遍历矩阵每一行的数据
# cvCircle(源图像指针, 画圆的圆心坐标,圆的半径,圆的颜色,圆的线条的粗细程度,线条的类型,圆心坐标点和半径值的小数点位数)
# 绘制圆形
cv.circle(planets, center=(i[0], i[1]),
radius=i[2], color=(0, 255, 0), thickness=2)
# 绘制圆心
cv.circle(planets, (i[0], i[1]), 2, (0, 0, 255), 3)
# 5 图像显示
plt.figure(figsize=(10,8),dpi=100)
plt.imshow(planets[:,:,::-1]),plt.title('霍夫变换圆检测')
plt.xticks([]), plt.yticks([])
plt.show()

总结:
- 模板匹配
原理:在给定的图片中查找和模板最相似的区域
API:利用cv.matchTemplate()进行模板匹配,然后
使用cv.minMaxLoc()搜索最匹配的位置。 - 霍夫线检测
原理:将要检测的内容转换到霍夫空间中,利用累加器统计最优解,将检测结果表示处理
API:cv2.HoughLines()
注意:该方法输入是的二值化图像,在进行检测前要将图像进行二值化处理 - 霍夫圆检测
方法:霍夫梯度法
API:cv.HoughCircles()
————————————————
版权声明:本文为CSDN博主「LiBiGo」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/qq_39237205/article/details/121947652