深度了解自动泊车技术及相关数据标注方法|自动驾驶
顺列式驻车对许多驾驶员来说,是一件较难的事情,特别是在极其狭窄的地方,而自动泊车系统则可以大大简化泊车的过程,为驾驶员带来更加智能和便捷的体验。
就在不久前,威马汽车正式发布“公共停车场无人免学习代客泊车智驾系统(PAVP)Beta 2.0版”。这是首个针对“公共停车场非固定停车位”推出的自动泊车功能。用户可以在汽车还未进入停车场之前提前下车,通过手机APP对车辆进行操控,威马W6可以自主找到车位并完成泊车操作。同时,用户还可以在停车场门口通过手机召唤车辆,不再受到距离的限制,解决用户的泊车难题。

自动泊车的原理
自动泊车的原理是利用分布在车辆周围的雷达探头测量出汽车自身与周围物体之间的距离和角度,通过车载电脑计算出操作流程,从而操控方向盘,不需要人工控制,汽车就可自动驶入车位。
自动泊车系统由含环境数据采集系统、中央处理器和车辆策略控制系统三部分组成。
环境数据采集系统:该系统包含图像采集系统和车载距离探测系统,可对车身周围环境各项参数进行采集,并将采集到的数据通过数据线传输至中央处理器。
中央处理器:作为计算机系统的运算和控制系统,可将采集到的数据进行分析处理,确定汽车的当前所在位置、目标位置以及周围的环境参数,并自动计算出自动泊车方案,并将其转换成电信号。
车辆策略控制系统:接收到从中央处理器传出的电信号后,依据方案中的指令使作出汽车相应的行驶操控,直至停车入位。

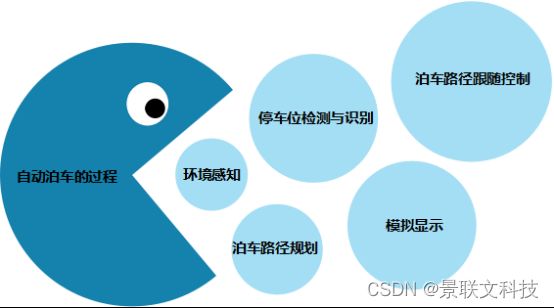
自动泊车的过程
自动泊车主要包括环境感知、停车位检测与识别、泊车路径规划、泊车路径跟随控制以及模拟显示五大环节。
环境感知:在泊车过程中利用超声波雷达可检测到行车过程中车身周围的障碍物,从而有效避免剐蹭等意外发生。
停车位检测与识别:主要通过分布在车身侧面的超声波传感器对车辆侧面的障碍物进行探测,可完成车位探测及精准定位。
泊车路径规划:为确保泊车的精准性,完成泊车路径所涉及到的动作尽可能少,因为每个动作产生的误差会依次传递至下一个动作,因此动作越少,误差越小,精度就越高。
泊车路径跟随控制:该过程可以通过传感器对车身周围环境进行实时探测,估算出车辆位置,实际运行路径与理想路径进行对比,必要时进行校正。
模拟显示:通过传感器反馈构建泊车环境模拟,具有提示作用与交互作用,可提示用户在泊车过程中进行必要操作,并将处理器信息及时传送给用户。
自动泊车的模式
自动泊车的模式有两种,分为正向自动泊车和侧向自动泊车。
自动泊车自动化等级
自动泊车自动化等级可分为半自动泊车和全自动泊车两种。
半自动泊车:半自动泊车系统可以为驾驶员控制车速,计算平台根据车速及汽车周围环境来判定是否需要转向并自动执行。
全自动泊车:全自动泊车可以为驾驶员进行转向、加减速等全部操作,由计算平台根据汽车周围环境来对汽车作出响应的行驶决策,驾驶员既可在车内进行监控也可在车外监控。
自动泊车优缺点
自动泊车的优点:汽车在交通灯等处做短暂停留时,为防止车辆打滑,自动泊车系统会在车辆停止后对车轮进行自动制动。
自动泊车的缺点:自动泊车功能在使用时对车辆有着较高的要求,例如在车辆自动泊车时从车辆后方突然走出一个人,自动泊车系统在这种情况下若不能及时采取停止或制动的措施,是非常危险的。
数据标注对自动泊车的重要性
自动泊车技术的提升需要算法的不断进步。数据作为自动驾驶的基础,有着重要作用。数据标注是将非结构化数据进行标注处理,以供机器学习,为算法提供优质养料,从而提升机器学习能力,可解决汽车自动泊车时经常遇到找不到车位、速度控制差、障碍物识别困难等难题。
景联文为自动泊车提供数据支持
景联文科技作为一家专业的数据采集标注公司,针对数据定制标注服务建立了先进的数据标注平台与成熟的标注、审核、质检机制,拥有丰富的标注工具,支持拉框标注、3D立方体标注、3D点云标注、多段线标注、语义分割、视频跟踪标注等,可为自动泊车技术提供高质量的标注数据。此外,景联文科技做过多次自动泊车障碍物标注项目。
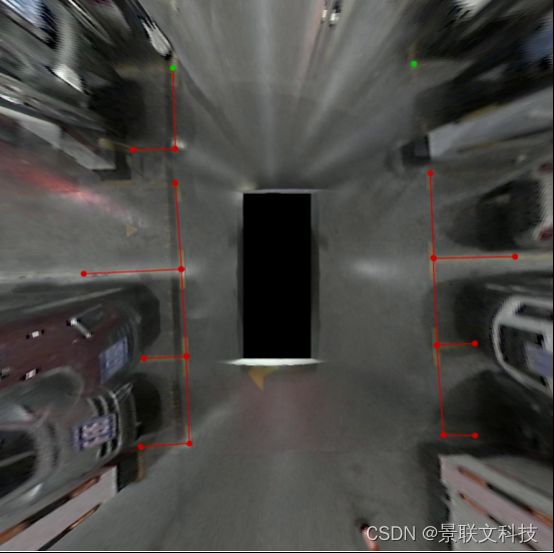
自动泊车标注案例:
- 整体要求
对图中车位进行标注,标注内容为:对车位轮廓进行多边形标注。
- 标注要求
- 若路沿上有停车位,则需要经过路沿进行泊车,若路沿不作为障碍物,则不进行标注。
- 若水泥柱和墙壁相连接,则需要分开标注。
- 当车位线截断点与车位角点距离很近时,则不需要标注。
- 图片中出现的禁停区域不做标注,其他车位正常标注。
- 分隔线与图片边缘相连围成的区域,视为可行驶区域。
- 当车位线截断点距离车位角点很近时,不需要不标。
- 当车位线磨损、模糊或本身就不是连续实线时,需要根据车位结构脑补出后面需要标注部分。
景联文数据标注平台在预标注技术的加持下,标注效率可提升三倍以上。开放甲方在线质检验收通道,支持本地化部署和SAAS服务。通过智能化的标注平台产品不断赋能AI训练数据行业,能有效提高人机协作效率扩大产能,及时调整标注方案做好逾期风险管控,准确把控数据质量问题,为AI相关企业提供处理大规模感知数据的能力,节省企业的时间和开发成本,实现人力驱动向技术驱动的重要升级。
景联文科技|AI基础数据服务|数据采集|数据标注|假指纹制作|指纹防伪算法
助力人工智能技术加速数字经济相关产业质量变革,赋能传统产业智能化转型升级
文章图文著作权归景联文科技所有,商业转载请联系景联文科技获得授权,非商业转载请注明出处。