NNDL 作业9:分别使用numpy和pytorch实现BPTT
目录
6-1P:推导RNN反向传播算法BPTT
6-2P:设计简单RNN模型,分别用Numpy、Pytorch实现反向传播算子,并代入数值测试
总结
6-1P:推导RNN反向传播算法BPTT
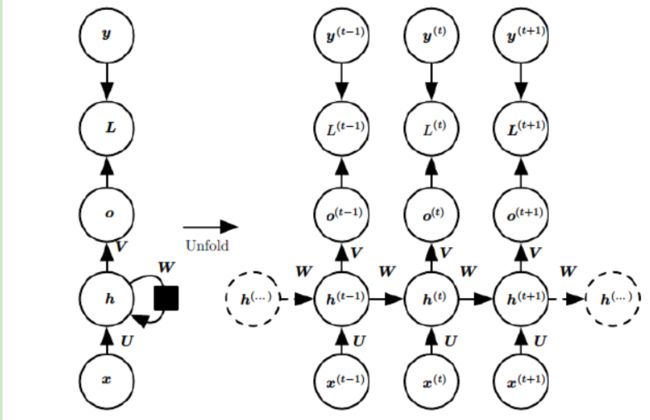
为了方便我们用以下朴素网络结构
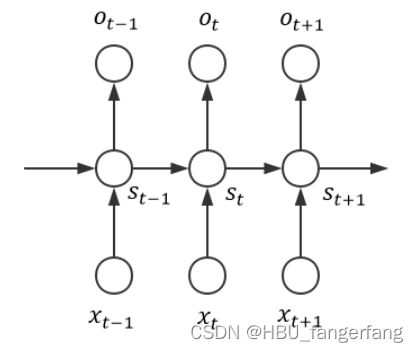
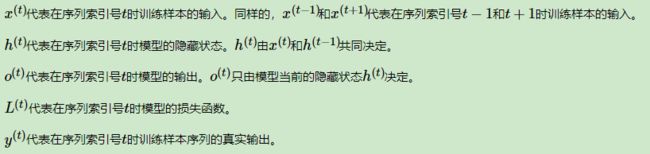
然后做出如下符号约定:
- 取ϕ作为隐藏层的激活函数
- 取φ作为输出层的变换函数
- 取
作为模型的损失函数,其中标签
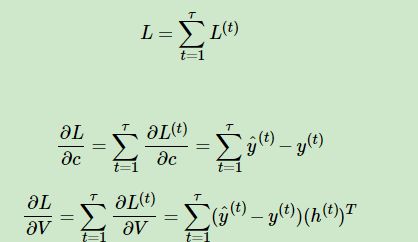
是一个one-hot 向量;由于 RNN 处理的通常是序列数据、所以在接受完序列中所有样本后再统一计算损失是合理的,此时模型的总损失可以表示为(假设输入序列长度为n):
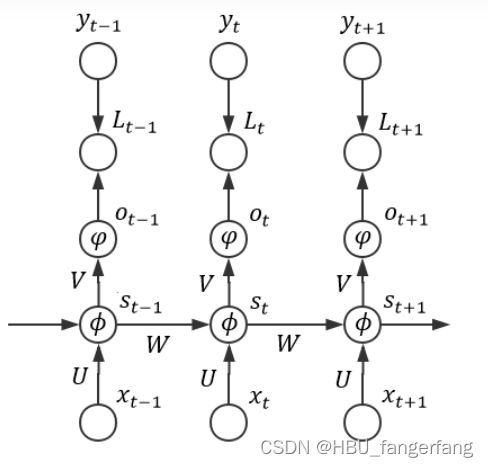
为了更清晰地表明各个配置,我们可以整理出如下图所示的结构:
易得![]() ,其中
,其中![]() 。
。
令:![]()
则有:![]()
从而:
![]()
![]()
可见对矩阵V的分析过程即为普通的反向传播算法,相对而言比较平凡。由 可知,它的总梯度可以表示为:
可知,它的总梯度可以表示为:
而事实上,RNN 的 BP 算法的主要难点在于它 State 之间的通信,亦即梯度除了按照空间结构传播(ot→st→xt)以外,还得沿着时间通道传播(st→st−1→…→s1),这导致我们比较难将相应 RNN 的 BP 算法写成一个统一的形式(回想之前的“前向传导算法”)。为此,我们可以采用“循环”的方法来计算各个梯度
由于是反向传播算法,所以t应从n开始降序循环至 1,在此期间(若需要初始化、则初始化为 0 向量或 0 矩阵):
- 计算时间通道上的“局部梯度” :
![]()
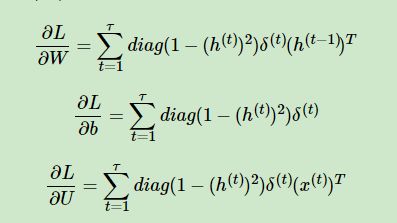
- 利用时间通道上的“局部梯度”计算U和W的梯度:
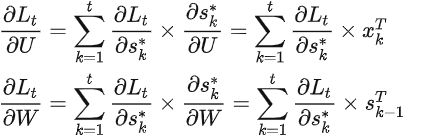
以上即为 RNN 反向传播算法的所有推导,它比 NN 的 BP 算法要繁复不少。事实上,像这种需要把梯度沿时间通道传播的 BP 算法是有一个专门的名词来描述的——Back Propagation Through Time(常简称为 BPTT,可译为“时序反向传播算法”)
不妨举一个具体的栗子来加深理解,假设:
- 激活函数ϕ为 Sigmoid 函数
- 变换函数φ为 Softmax 函数
- 损失函数Lt为 交叉熵损失函数
![]()
其中:
从而
![]()
且t从n开始降序循环至 1 的期间中,各个“局部梯度”为:


![]()
由此可算出如下相应梯度:
6-2P:设计简单RNN模型,分别用Numpy、Pytorch实现反向传播算子,并代入数值测试
Numpy实现:
class RNN:
def __init__(self, word_dim, hidden_dim=100, bptt_truncate=4):
self.word_dim = word_dim
self.hidden_dim = hidden_dim
self.bptt_truncate = bptt_truncate
# Randomly initialize the network parameters, np.random.uniform(low,high,size=(m,n)) -> matrix: m * n
self.U = np.random.uniform(-np.sqrt(1./word_dim), np.sqrt(1./word_dim), (hidden_dim, word_dim))
self.V = np.random.uniform(-np.sqrt(1./hidden_dim), np.sqrt(1./hidden_dim), (word_dim, hidden_dim))
self.W = np.random.uniform(-np.sqrt(1./hidden_dim), np.sqrt(1./hidden_dim), (hidden_dim, hidden_dim))
def softmax(self,x):
exp_x = np.exp(x)
softmax_x = exp_x / np.sum(exp_x)
return softmax_x
def forward_propagation(self, x):
# hidden states is h, prediction is y_hat
T = len(x)
h = np.zeros((T + 1, self.hidden_dim))
h[-1] = np.zeros(self.hidden_dim)
y_hat = np.zeros((T, self.word_dim))
# For each time step...
for t in np.arange(T):
x_t = np.array(x[t]).reshape(-1,1)
h[t] = (self.U.dot(x_t) + self.W.dot(h[t-1].reshape(-1,1))).reshape(self.hidden_dim)
o_t = self.V.dot(h[t])
y_hat[t] = self.softmax(o_t)
return [y_hat, h]
def predict(self, x):
# Perform forward propagation and return index of the highest score
y, h = self.forward_propagation(x)
return np.argmax(y, axis=1)
def calculate_total_loss(self, x, labels):
total_L = 0
# For each sentence...
for i in np.arange(len(labels)):
y_hat, h = self.forward_propagation(x[i])
total_L += -1 * sum([np.log(y_pred.T.dot(y_true)) for y_pred,y_true in zip(y_hat,np.array(labels[i]))])
return total_L
def calculate_loss(self, x, labels):
# Divide the total loss by the number of training examples
N = np.sum((len(label_i) for label_i in labels))
return self.calculate_total_loss(x,labels)/N
def bptt(self, x, label):
T = len(label)
# Perform forward propagation
y_hat, h = self.forward_propagation(x)
# We accumulate the gradients in these variables
dLdU = np.zeros(self.U.shape)
dLdV = np.zeros(self.V.shape)
dLdW = np.zeros(self.W.shape)
# delta_y -> dLdy: y_hat_t - y_t
delta_y = np.zeros(y_hat.shape)
# For each output backwards...
for t in np.arange(T)[::-1]:
delta_y[t] = (y_hat[t].reshape(-1,1) - np.array(label[t]).reshape(-1,1)).ravel()
dLdV += delta_y[t].reshape(-1,1).dot(h[t].T.reshape(1,-1))
# Initial delta_t calculation when t is T
delta_t = (1-(h[t]**2)) * self.V.T.dot(delta_y[t])
# Backpropagation through time (for at most self.bptt_truncate steps)
for bptt_step in np.arange(max(0, t-self.bptt_truncate), t+1)[::-1]:
dLdW += delta_t * h[bptt_step-1]
dLdU += delta_t.reshape(-1,1) * np.array(x[bptt_step]).reshape(1,-1)
# Update delta_t for next step
delta_t = (1-(h[t]**2)) * (self.V.T.dot(delta_y[bptt_step]) + self.W.T.dot(delta_t))
return [dLdU, dLdV, dLdW]
# Performs one step of SGD.
def numpy_sdg_step(self, x, label, learning_rate):
# Calculate the gradients
dLdU, dLdV, dLdW = self.bptt(x, label)
# Change parameters according to gradients and learning rate
self.U -= learning_rate * dLdU
self.V -= learning_rate * dLdV
self.W -= learning_rate * dLdW
def train_with_sgd(model, X_train, y_train, learning_rate=0.005, nepoch=100, evaluate_loss_after=5):
# We keep track of the losses so we can plot them later
losses = []
num_examples_seen = 0
for epoch in range(nepoch):
# Optionally evaluate the loss
if (epoch % evaluate_loss_after == 0):
loss = model.calculate_loss(X_train, y_train)
losses.append((num_examples_seen, loss))
time = datetime.now().strftime('%Y-%m-%d %H:%M:%S')
print(f'{time} Loss after num_examples_seen {num_examples_seen} epoch {epoch}, current loss is {loss}')
# Adjust the learning rate if loss increases
if(len(losses)>1 and losses[-1][1]>losses[-2][1]):
learning_rate = learning_rate * 0.5
print("Setting learning rate to %f" % learning_rate)
sys.stdout.flush()
# For each training example...
for i in range(len(y_train)):
# One SGD step
model.numpy_sdg_step(X_train[i], y_train[i], learning_rate)
num_examples_seen += 1
s1 = '你 好 李 焕 英'
s2 = '夏 洛 特 烦 恼'
vocab_size= len(s1.split(' ')) + len(s2.split(' '))
vocab = [[0] * vocab_size for _ in range(vocab_size)]
for i in range(vocab_size): vocab[i][i] = 1
x_sample = [vocab[:5]] + [vocab[5:]]
labels = [vocab[1:6]] + [vocab[6:]+[vocab[0]]]
rnn = RNN(10)
train_with_sgd(rnn,x_sample,labels)得到以下结果:
Loss after num_examples_seen 0 epoch 0, current loss is 2.2592256714820835
Loss after num_examples_seen 10 epoch 5, current loss is 2.1503379839162173
Loss after num_examples_seen 20 epoch 10, current loss is 2.044293154297274
Loss after num_examples_seen 30 epoch 15, current loss is 1.940793510733868
Loss after num_examples_seen 40 epoch 20, current loss is 1.8396290861210651
Loss after num_examples_seen 50 epoch 25, current loss is 1.7406728454158427
Loss after num_examples_seen 60 epoch 30, current loss is 1.6438759771865512
Loss after num_examples_seen 70 epoch 35, current loss is 1.5492624544062168
Loss after num_examples_seen 80 epoch 40, current loss is 1.4569222603517766
Loss after num_examples_seen 90 epoch 45, current loss is 1.3670029019526193
Loss after num_examples_seen 100 epoch 50, current loss is 1.279699092774083
Loss after num_examples_seen 110 epoch 55, current loss is 1.1952407450521148
Loss after num_examples_seen 120 epoch 60, current loss is 1.1138796059742215
Loss after num_examples_seen 130 epoch 65, current loss is 1.0358749571871382
Loss after num_examples_seen 140 epoch 70, current loss is 0.9614787720174272
Loss after num_examples_seen 150 epoch 75, current loss is 0.8909206840507029
Loss after num_examples_seen 160 epoch 80, current loss is 0.8243932211561216
Loss after num_examples_seen 170 epoch 85, current loss is 0.7620381153394573
Loss after num_examples_seen 180 epoch 90, current loss is 0.7039350300238063
Loss after num_examples_seen 190 epoch 95, current loss is 0.650094418183265Torch实现:
import torch
from torch import nn
import numpy as np
import matplotlib.pyplot as plt
plt.figure(figsize=(8, 5))
# how many time steps/data pts are in one batch of data
seq_length = 20
# generate evenly spaced data pts
time_steps = np.linspace(0, np.pi, seq_length + 1)
data = np.sin(time_steps)
data.resize((seq_length + 1, 1)) # size becomes (seq_length+1, 1), adds an input_size dimension
x = data[:-1] # all but the last piece of data
y = data[1:] # all but the first
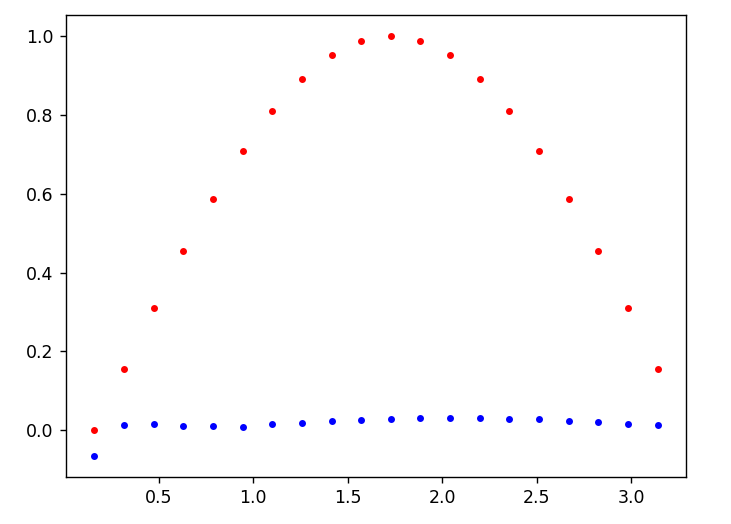
# display the data
plt.plot(time_steps[1:], x, 'r.', label='input, x') # x
plt.plot(time_steps[1:], y, 'b.', label='target, y') # y
plt.legend(loc='best')
plt.show()
class RNN(nn.Module):
def __init__(self, input_size, output_size, hidden_dim, n_layers):
super(RNN, self).__init__()
self.hidden_dim = hidden_dim
# define an RNN with specified parameters
# batch_first means that the first dim of the input and output will be the batch_size
self.rnn = nn.RNN(input_size, hidden_dim, n_layers, batch_first=True)
# last, fully-connected layer
self.fc = nn.Linear(hidden_dim, output_size)
def forward(self, x, hidden):
# x (batch_size, seq_length, input_size)
# hidden (n_layers, batch_size, hidden_dim)
# r_out (batch_size, time_step, hidden_size)
batch_size = x.size(0)
# get RNN outputs
r_out, hidden = self.rnn(x, hidden)
# shape output to be (batch_size*seq_length, hidden_dim)
r_out = r_out.view(-1, self.hidden_dim)
# get final output
output = self.fc(r_out)
return output, hidden
# test that dimensions are as expected
test_rnn = RNN(input_size=1, output_size=1, hidden_dim=10, n_layers=2)
# generate evenly spaced, test data pts
time_steps = np.linspace(0, np.pi, seq_length)
data = np.sin(time_steps)
data.resize((seq_length, 1))
test_input = torch.Tensor(data).unsqueeze(0) # give it a batch_size of 1 as first dimension
print('Input size: ', test_input.size())
# test out rnn sizes
test_out, test_h = test_rnn(test_input, None)
print('Output size: ', test_out.size())
print('Hidden state size: ', test_h.size())
# decide on hyperparameters
input_size = 1
output_size = 1
hidden_dim = 32
n_layers = 1
# instantiate an RNN
rnn = RNN(input_size, output_size, hidden_dim, n_layers)
print(rnn)
# MSE loss and Adam optimizer with a learning rate of 0.01
criterion = nn.MSELoss()
optimizer = torch.optim.Adam(rnn.parameters(), lr=0.01)
# train the RNN
def train(rnn, n_steps, print_every):
# initialize the hidden state
hidden = None
for batch_i, step in enumerate(range(n_steps)):
# defining the training data
time_steps = np.linspace(step * np.pi, (step + 1) * np.pi, seq_length + 1)
data = np.sin(time_steps)
data.resize((seq_length + 1, 1)) # input_size=1
x = data[:-1]
y = data[1:]
# convert data into Tensors
x_tensor = torch.Tensor(x).unsqueeze(0) # unsqueeze gives a 1, batch_size dimension
y_tensor = torch.Tensor(y)
# outputs from the rnn
prediction, hidden = rnn(x_tensor, hidden)
## Representing Memory ##
# make a new variable for hidden and detach the hidden state from its history
# this way, we don't backpropagate through the entire history
hidden = hidden.data
# calculate the loss
loss = criterion(prediction, y_tensor)
# zero gradients
optimizer.zero_grad()
# perform backprop and update weights
loss.backward()
optimizer.step()
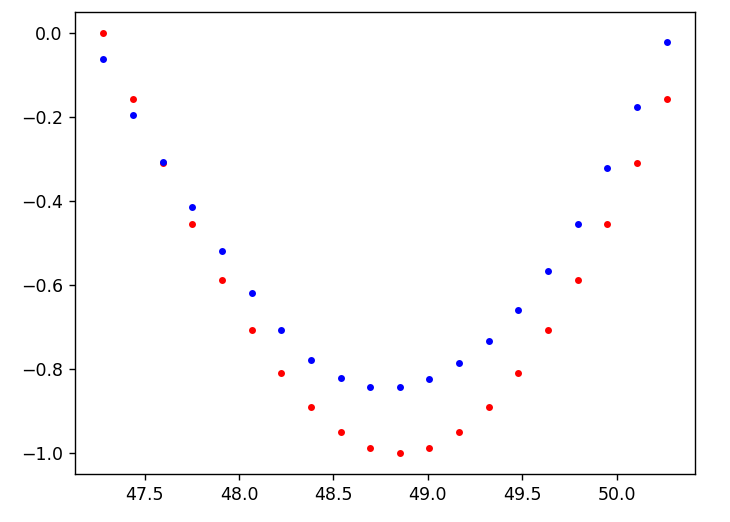
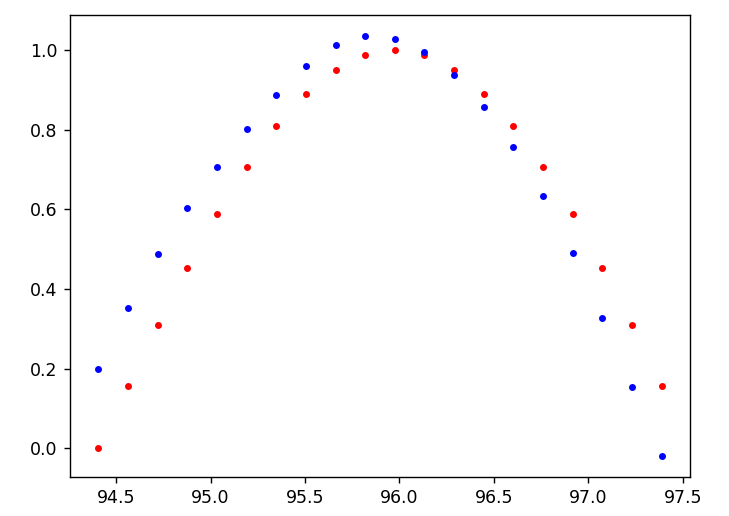
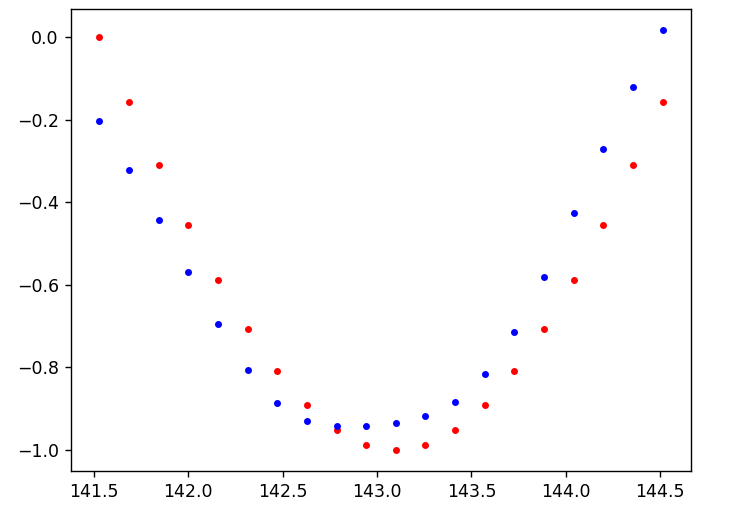
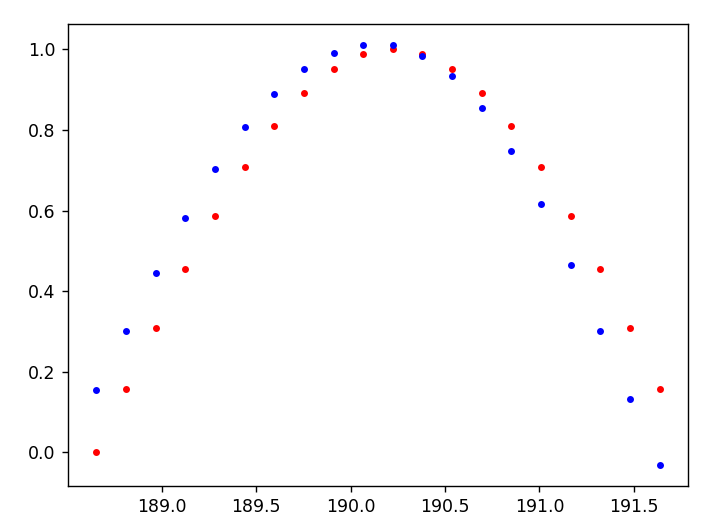
# display loss and predictions
if batch_i % print_every == 0:
print('Loss: ', loss.item())
plt.plot(time_steps[1:], x, 'r.') # input
plt.plot(time_steps[1:], prediction.data.numpy().flatten(), 'b.') # predictions
plt.show()
return rnn
# train the rnn and monitor results
n_steps = 75
print_every = 15
trained_rnn = train(rnn, n_steps, print_every)Input size: torch.Size([1, 20, 1])
Output size: torch.Size([20, 1])
Hidden state size: torch.Size([2, 1, 10])
RNN(
(rnn): RNN(1, 32, batch_first=True)
(fc): Linear(in_features=32, out_features=1, bias=True)
)
Loss: 0.47356677055358887
Loss: 0.015861276537179947
Loss: 0.0011221482418477535
Loss: 0.0008511045016348362
Loss: 0.0004949825815856457
进程已结束,退出代码为 0

总结
本次实验手推了一遍BPTT也用numpy和torch写了一遍RNN,最后的结果发现torch要比numpy手写的效果好很多。
关于BPTT的推导,可能是这次作业离上课时间有点久了,再加上回到家中没有了宿舍中舍友可以直接询问方便,自己写的时候感觉到了一些小困难,不过再翻书和查询资料后回忆起来了,在查询资料的途中发现了大佬刘建平老师关于RNN的反向传播推导,写的非常清楚明白,也写出来了RNN和DNN的不同,在这里推荐给大家
参考链接:
循环神经网络(RNN)模型与前向反向传播算法 - 刘建平Pinard - 博客园 (cnblogs.com)
数学 · RNN(二)· BPTT 算法 - 知乎