【分享】从零开始在树莓派4B上搭建环境,使用ros控制dofbot机械臂(三)
文章目录
-
-
-
- 《从零开始配置树莓派控制机械臂》专栏传送门
- 1. 安装OpenCV-Python
- 2. 图形化界面的安装
- 3. 安装机器人操作系统ROS
-
-
《从零开始配置树莓派控制机械臂》专栏传送门
【分享】从零开始在树莓派4B上搭建环境,使用ros控制dofbot机械臂(一)
【分享】从零开始在树莓派4B上搭建环境,使用ros控制dofbot机械臂(二)
【分享】从零开始在树莓派4B上搭建环境,使用ros控制dofbot机械臂(三)
【分享】从零开始在树莓派4B上搭建环境,使用ros控制dofbot机械臂(四)
【分享】从零开始在树莓派4B上搭建环境,使用ros控制dofbot机械臂(五)
【分享】从零开始在树莓派4B上搭建环境,使用ros控制dofbot机械臂(六)
1. 安装OpenCV-Python
OpenCV简介
OpenCV是一个开源的跨平台计算机视觉和机器学习软件库,它由一系列C函数和少量C++类构件而成,轻量级而且高效,同时还提供了Python、Ruby、Matlab等语言的接口,实现了图像处理和计算机视觉方面的很多通用算法。
实际项目中可以使用OpenCV来做图像的颜色识别、目标检测、物体分类等功能。
安装OpenCV-Python
ubuntu mate 20.04系统的库中自带有OpenCV的apt地址,所以可以直接输入命令安装,而不需要手动编译源码。
运行以下命令安装即可:
sudo apt install libopencv-dev python3-opencv
测试OpenCV-Python
1.运行Python3环境
python3
2.导入cv2模块
import cv2
3.打印OpenCV-Python的版本
print(cv2.__version__)
2. 图形化界面的安装
安装x-windows的基础
sudo apt-get install x-window-system-core
安装ubuntu桌面
sudo apt-get install ubuntu-desktop
重启
sudo reboot
3. 安装机器人操作系统ROS
ROS简介
ROS(Robot Operating System, 机器人操作系统)是用于编写机器人软件程序的一种具有高度灵活性的软件架构,它不仅提供一系列程序库和工具以帮助软件开发者创建机器人应用软件,还提供了硬件抽象、设备驱动、库函数、可视化、消息传递和软件包管理等诸多功能。
安装ROS
1.添加ROS的包地址到软件源文件中。
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
2.添加keys
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
3.更新软件源,这一步必须操作,系统才能获取上面添加的ROS源地址。
sudo apt update
4.安装ROS桌面完整版,里面包含了ROS桌面插件、2D/3D模拟器和2D/3D感知包等。
sudo apt install ros-noetic-desktop-full
此时系统会询问是否确定安装,输入Y再按回车确定安装。由于安装文件比较多,安装过程比较久,请耐心等待。
5.配置环境
source /opt/ros/noetic/setup.bash
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
6.安装kdl和moveit工具
sudo apt-get install ros-noetic-moveit
sudo apt-get install ros-noetic-kdl-*
7.到此就已经在ubuntu mate 20.04系统中安装完整的机器人操作系统ROS Noetic了。
输入ros再按两次Tab键可以查看到ros相关的命令。
测试ROS
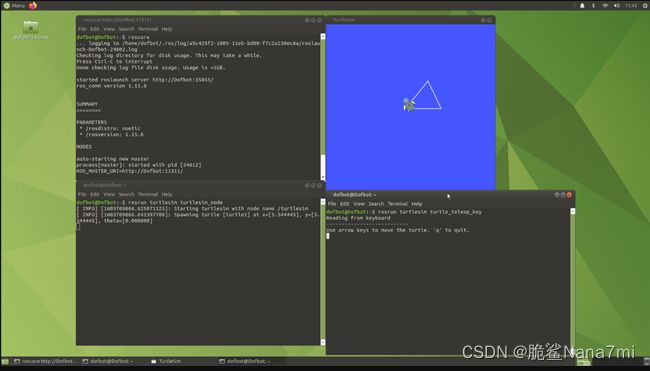
测试过程中总共需要打开3个终端,第一个终端打开ROS主进程,第二个终端打开小乌龟控制台,第三个终端用于键盘输入控制小乌龟运动。
注意:此测试过程需要在实际连接树莓派的屏幕上操作,不可以使用远程SSH来操作。
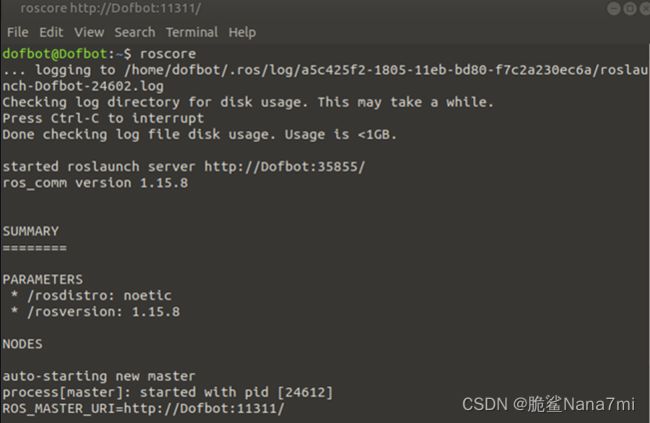
1.打开第一个终端,输入以下命令打开主进程
roscore
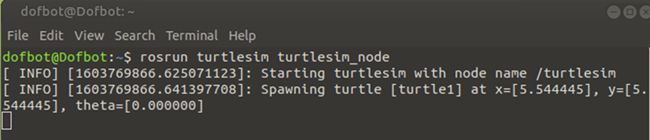
2.打开第二个终端,输入以下命令打开小乌龟控制台
rosrun turtlesim turtlesim_node
3.打开第三个终端,输入以下命令打开输入设备,然后保持第三个终端为活跃状态,通过控制树莓派连接的键盘上的方向键就可以控制小乌龟的运动。
rosrun turtlesim turtle_teleop_key
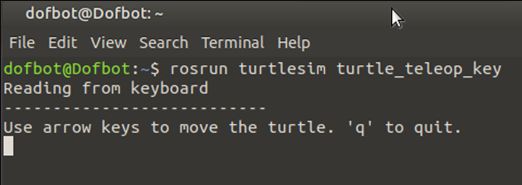
按‘q’可以退出输入控制台。其他终端按Ctrl+C退出。
4.整个窗口的截图如下,到此ROS环境测试完成。