改进YOLO:YOLOv5结合BoTNet Transformer
yolov5 + BoTNet Transformer
一、配置yolov5s_botnet.yaml
# parameters
nc: 10 # number of classes
depth_multiple: 0.33 # model depth multiple
width_multiple: 0.50 # layer channel multiple
anchors:
- [10,13, 16,30, 33,23] # P3/8
- [30,61, 62,45, 59,119] # P4/16
- [116,90, 156,198, 373,326] # P5/32
# YOLOv5 backbone
backbone:
# [from, number, module, args] # [c=channels,module,kernlsize,strides]
[[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2 [c=3,64*0.5=32,3]
[-1, 1, Conv, [128, 3, 2]], # 1-P2/4
[-1, 3, C3, [128]],
[-1, 1, Conv, [256, 3, 2]], # 3-P3/8
[-1, 6, C3, [256]],
[-1, 1, Conv, [512, 3, 2]], # 5-P4/16
[-1, 9, C3, [512]],
[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32
[-1, 1, SPPF, [512,512]],
[-1, 3, BoT3, [1024]], # 9
]
# YOLOv5 head
head:
[[-1, 1, Conv, [512, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 5], 1, Concat, [1]], # cat backbone P4
[-1, 3, C3, [512, False]], # 13
[-1, 1, Conv, [256, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 3], 1, Concat, [1]], # cat backbone P3
[-1, 3, C3, [256, False]], # 17 (P3/8-small)
[-1, 1, Conv, [256, 3, 2]],
[[-1, 14], 1, Concat, [1]], # cat head P4
[-1, 3, C3, [512, False]], # 20 (P4/16-medium) [256, 256, 1, False]
[-1, 1, Conv, [512, 3, 2]], #[256, 256, 3, 2]
[[-1, 10], 1, Concat, [1]], # cat head P5
[-1, 3, C3, [1024, False]], # 23 (P5/32-large) [512, 512, 1, False]
[[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
]
二、配置common.py文件
在common.py中增加以下下代码:
class MHSA(nn.Module):
def __init__(self, n_dims, width=14, height=14, heads=4, pos_emb=False):
super(MHSA, self).__init__()
self.heads = heads
self.query = nn.Conv2d(n_dims, n_dims, kernel_size=1)
self.key = nn.Conv2d(n_dims, n_dims, kernel_size=1)
self.value = nn.Conv2d(n_dims, n_dims, kernel_size=1)
self.pos = pos_emb
if self.pos:
self.rel_h_weight = nn.Parameter(torch.randn([1, heads, (n_dims) // heads, 1, int(height)]),
requires_grad=True)
self.rel_w_weight = nn.Parameter(torch.randn([1, heads, (n_dims) // heads, int(width), 1]),
requires_grad=True)
self.softmax = nn.Softmax(dim=-1)
def forward(self, x):
n_batch, C, width, height = x.size()
q = self.query(x).view(n_batch, self.heads, C // self.heads, -1)
k = self.key(x).view(n_batch, self.heads, C // self.heads, -1)
v = self.value(x).view(n_batch, self.heads, C // self.heads, -1)
# print('q shape:{},k shape:{},v shape:{}'.format(q.shape,k.shape,v.shape)) #1,4,64,256
content_content = torch.matmul(q.permute(0, 1, 3, 2), k) # 1,C,h*w,h*w
# print("qkT=",content_content.shape)
c1, c2, c3, c4 = content_content.size()
if self.pos:
# print("old content_content shape",content_content.shape) #1,4,256,256
content_position = (self.rel_h_weight + self.rel_w_weight).view(1, self.heads, C // self.heads, -1).permute(
0, 1, 3, 2) # 1,4,1024,64
content_position = torch.matmul(content_position, q) # ([1, 4, 1024, 256])
content_position = content_position if (
content_content.shape == content_position.shape) else content_position[:, :, :c3, ]
assert (content_content.shape == content_position.shape)
# print('new pos222-> shape:',content_position.shape)
# print('new content222-> shape:',content_content.shape)
energy = content_content + content_position
else:
energy = content_content
attention = self.softmax(energy)
out = torch.matmul(v, attention.permute(0, 1, 3, 2)) # 1,4,256,64
out = out.view(n_batch, C, width, height)
return out
class BottleneckTransformer(nn.Module):
# Transformer bottleneck
# expansion = 1
def __init__(self, c1, c2, stride=1, heads=4, mhsa=True, resolution=None, expansion=1):
super(BottleneckTransformer, self).__init__()
c_ = int(c2 * expansion)
self.cv1 = Conv(c1, c_, 1, 1)
# self.bn1 = nn.BatchNorm2d(c2)
if not mhsa:
self.cv2 = Conv(c_, c2, 3, 1)
else:
self.cv2 = nn.ModuleList()
self.cv2.append(MHSA(c2, width=int(resolution[0]), height=int(resolution[1]), heads=heads))
if stride == 2:
self.cv2.append(nn.AvgPool2d(2, 2))
self.cv2 = nn.Sequential(*self.cv2)
self.shortcut = c1 == c2
if stride != 1 or c1 != expansion * c2:
self.shortcut = nn.Sequential(
nn.Conv2d(c1, expansion * c2, kernel_size=1, stride=stride),
nn.BatchNorm2d(expansion * c2)
)
self.fc1 = nn.Linear(c2, c2)
def forward(self, x):
out = x + self.cv2(self.cv1(x)) if self.shortcut else self.cv2(self.cv1(x))
return out
class BoT3(nn.Module):
# CSP Bottleneck with 3 convolutions
def __init__(self, c1, c2, n=1, e=0.5, e2=1, w=20, h=20): # ch_in, ch_out, number, , expansion,w,h
super(BoT3, self).__init__()
c_ = int(c2 * e) # hidden channels
self.cv1 = Conv(c1, c_, 1, 1)
self.cv2 = Conv(c1, c_, 1, 1)
self.cv3 = Conv(2 * c_, c2, 1) # act=FReLU(c2)
self.m = nn.Sequential(
*[BottleneckTransformer(c_, c_, stride=1, heads=4, mhsa=True, resolution=(w, h), expansion=e2) for _ in
range(n)])
# self.m = nn.Sequential(*[CrossConv(c_, c_, 3, 1, g, 1.0, shortcut) for _ in range(n)])
def forward(self, x):
return self.cv3(torch.cat((self.m(self.cv1(x)), self.cv2(x)), dim=1))三、配置yolo.py
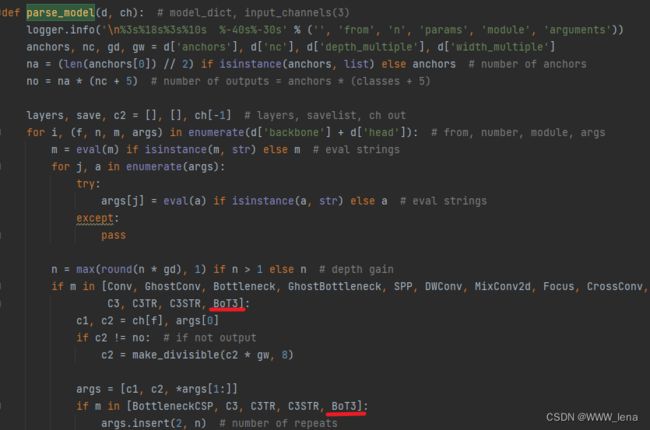
在yolo.py中parse_model(d, ch)函数下,增加BoT3,如下:
四、train.py文件配置
在if __name__ == '__main__':中更改cfg

五、一些问题
1.NameError: name 'F' is not defined
在common.py中增加以下代码:
import torch.nn.functional as F3.NameError: name 'window_partition' is not defined
def window_partition(x, window_size):
"""
Args:
x: (B, H, W, C)
window_size (int): window size
Returns:
windows: (num_windows*B, window_size, window_size, C)
"""
B, H, W, C = x.shape
x = x.view(B, H // window_size, window_size, W // window_size, window_size, C)
windows = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(-1, window_size, window_size, C)
return windows
4.NameError: name 'window_reverse' is not defined
ef window_reverse(windows, window_size, H, W):
"""
Args:
windows: (num_windows*B, window_size, window_size, C)
window_size (int): Window size
H (int): Height of image
W (int): Width of image
Returns:
x: (B, H, W, C)
"""
B = int(windows.shape[0] / (H * W / window_size / window_size))
x = windows.view(B, H // window_size, W // window_size, window_size, window_size, -1)
x = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(B, H, W, -1)
return x