nn.BatchNorm2d原理探究与实验
前言
早上被同学为了batch norm的原理,由于我之前仅仅停留在使用torch.nn.BatchNorm2d的阶段,只知道是对channel维度就行批归一化,但不太清楚具体实现,于是就做了该实验。先来看看torch的例子,然后再写个手写版方式计算的代码。
bn的后的每一个元素 y i y_i yi 可简单写为
y i = x i − x ˉ σ 2 + ϵ y_i = \frac{x_i-\bar{x}}{\sqrt{\sigma^{2}} + \epsilon} yi=σ2+ϵxi−xˉ
其中, x i x_i xi 是之前的元素, x ˉ \bar{x} xˉ 是channel维度上的均值, σ \sigma σ 是channel 维度上的标准差, ϵ \epsilon ϵ 是一个系数因子, (有点类似于拉普拉斯平滑,防止分母为0?but I’m not sure), 默认为 1 0 − 5 10^{-5} 10−5, 很小的一个数。
另外Batch Norm用的多还是在CV, NLP用的少(NLP LayerNorm用的多),所以就以CV中的图片为例子。
关于各种Norm可见一篇推送 综述:神经网络中 Normalization 的发展历程 。
torch方式
[B, C, H, W]分别指的是batch_size, channel(彩色图为三,灰色图为1,本例子只是为了方便演示,只有2维,大家知道就好),图片的宽和高。
# encoding:utf-8
import torch
import torch.nn as nn
# [B, C, H, W]
input = torch.tensor([[[[1, 1],
[1, 2]],
[[-1, 1],
[0, 1]]],
[[[0, -1],
[2, 2]],
[[0, -1],
[3, 1]]]]).float()
# num_features - num_features from an expected input of size:batch_size*num_features*height*width
# eps:default:1e-5 (公式中为数值稳定性加到分母上的值)
# momentum:动量参数,用于running_mean and running_var计算的值,default:0.1
# affine参数设为True表示weight和bias将被使用, 不过该例子中没有反向传播, 所以加不加都是无所谓的
m = nn.BatchNorm2d(2, affine=False)
output = m(input)
# print('input:\n', input)
print('m.weight:\n', m.weight)
print('m.bias:', m.bias)
print('output:\n', output)
print('output:', output.size())

这里要说明的是, 其实不管affine设不设置为True,在该例子中结果都一样,我们看一下权重就明白了, weight全1, 那么进行相乘后还为原来的数, bias为0, 那么相加后还为原来的数。这里没有反向传播,所以权重不会变。
手写方式
我们除了channel通道外,其他维度都给展平, 然后去算均值和方差,用算出来的均值和方差再对原来的数据进行操作。
# encoding:utf-8
from matplotlib.pyplot import axis
import torch
import torch.nn as nn
input = torch.tensor([[[[1, 1],
[1, 2]],
[[-1, 1],
[0, 1]]],
[[[0, -1],
[2, 2]],
[[0, -1],
[3, 1]]]]).float()
# [B, C, H, W]
N, c_num, h, w = input.shape
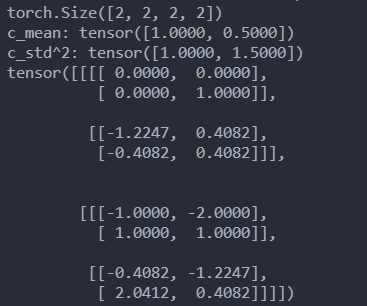
print(input.shape)
x = input.transpose(0, 1).flatten(1)
# print(x)
c_mean = x.mean(dim=1)
print('c_mean:', c_mean)
c_std = torch.tensor(x.numpy().std(axis=1)) # 标准差公式, torch N-1, numpy N
print('c_std^2:', c_std ** 2)
# # 扩大维度,并复制好元素,方便下面批次操作
c_mean = c_mean.reshape(1, 2, 1, 1).repeat(N, 1, h, w)
c_std = c_std.reshape(1, 2, 1, 1).repeat(N, 1, h, w)
# # print(c_mean)
# # print(c_std)
eps = 1e-5
output = (input - c_mean) / (c_std ** 2 + eps) ** 0.5
print(output)
这里需要注意一下, pytorch和numpy的标准差计算公式是有区别的, 所以我代码中才先转为了numpy再去算。不过按理pytorch应该可以传个参数啥的去改一下计算方式吧。
numpy:
s t d = 1 N ∑ i = 1 N ( x i − x ˉ ) 2 std = \sqrt{\frac{1}{N}\sum^{N}_{i=1}(x_i-\bar{x})^2 } std=N1i=1∑N(xi−xˉ)2
torch:
s t d = 1 N − 1 ∑ i = 1 N ( x i − x ˉ ) 2 std = \sqrt{\frac{1}{N-1}\sum^{N}_{i=1}(x_i-\bar{x})^2 } std=N−11i=1∑N(xi−xˉ)2