安全帽检测(yolov5+tnn)
文章目录
- Ubuntu18.04下安装PyTorch(GPU)详细步骤
-
- 1.Anaconda的下载安装
- 2. NVIDIA驱动安装
- 3. 安装CUDA10.2
-
- 3.1 安装依赖库
- 3.2 安装cuda10.2
- 3.3 添加cuda路径
- 4. 安装cudnn
- 5 安装PyTorch
- 用yolov5训练自己的目标检测模型
-
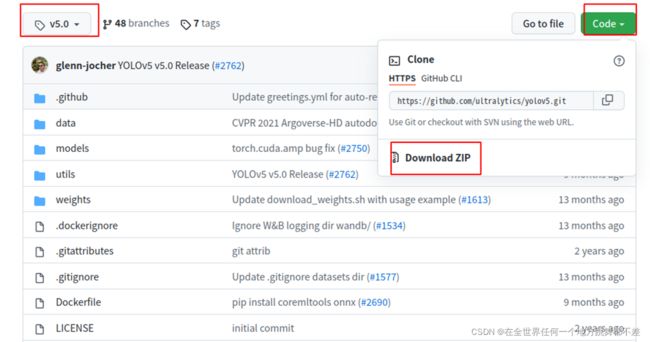
- 1.克隆yolov5-5.0项目
- 2.安装依赖环境
- 3. 下载预训练权重
- 4 准备自己的数据集
- 5 写自己的配置文件
- 6 训练自己的模型
- 7 利用训练好的模型检测图片
- yolov5+TNN推理框架部署到windows上
-
- 1.下载tnn-master项目
- 2.将.pt转换成tnn模型(在ubuntu18.04系统完成)
- 3.将ONNX转换成tnn模型
- 4 windows+cpu环境编译tnn
-
- 4.1 环境要求
- 4.2.编译步骤
- 5 在VS2019上运行推理程序
-
- 5.1 添加路径和库
- 5.2 代码
-
- yolo.h
- yolo.cpp
- RST_HelmetDetection.h
- RST_HelmetDetection.cpp
- fileLoad.h
- fileLoad.cpp
- 5.3 一些比较和分析
Ubuntu18.04下安装PyTorch(GPU)详细步骤
1.Anaconda的下载安装
到官网Anaconda [https://www.anaconda.com/products/individual] 进行下载,Anaconda3-2021.11-Linux-x86_64.sh,带了python3.9:

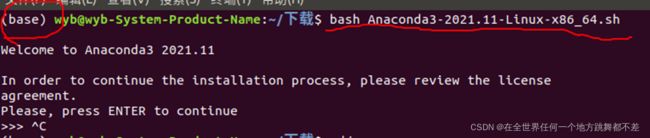
在 Anaconda3-2021.11-Linux-x86_64.sh 所在文件目录打开终端,运行
bash Anaconda3-2021.11-Linux-x86_64.sh
然后一路yes,enter,yes, 安装成功后需要关闭当前终端,打开新终端就会出现(base)。
查看python版本:

2. NVIDIA驱动安装
在英伟达官网查看设备是否支持显卡驱动:https://developer.nvidia.com/cuda-gpus
点击查看

使用命令ubuntu-drivers devices可查看当前的设备和驱动:

安装所有驱动:
sudo ubuntu-drivers autoinstall
安装完成之后重启电脑。
重启之后使用命令sudo nvidia-smi验证是否安装成功:
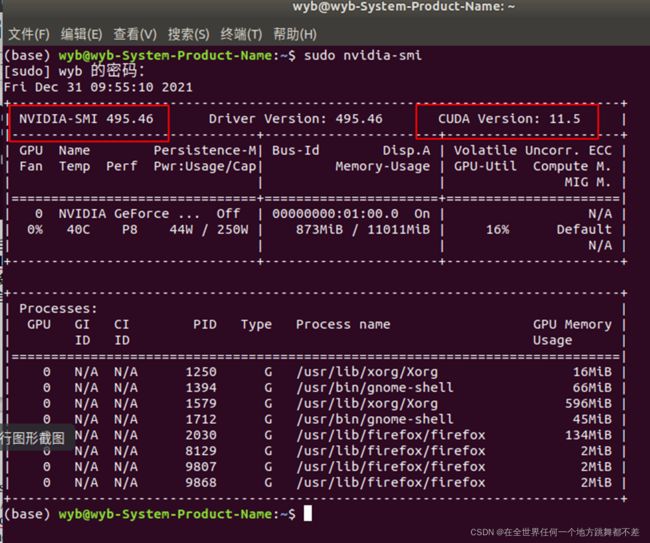
cuda最高支持版本是11.5.
3. 安装CUDA10.2
3.1 安装依赖库
sudo apt-get install freeglut3-dev build-essential libx11-dev libxmu-dev
sudo apt-get install libxi-dev libgl1-mesa-glx libglu1-mesa libglu1-mesa-dev
可能出现连接失败错误,需要添加源,参考Ubuntu学习系列——添加源,don’t quit
https://blog.csdn.net/weixin_44354586/article/details/89392951
sudo su
sudo gedit /etc/apt/sources.list
在sources.list文件末尾添加源
更改保存后输入命令
sudo apt-get update
sudo apt upgrade
3.2 安装cuda10.2
去英伟达官网下载cuda10.2: https://developer.nvidia.com/cuda-10.2-download-archive
cuda历史版本: https://developer.nvidia.com/cuda-toolkit-archive
选择
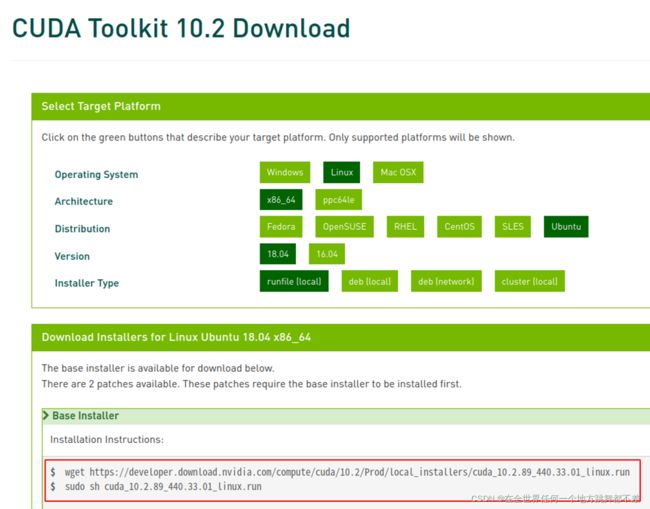
在终端输入命令下载cuda10.2
wget https://developer.download.nvidia.com/compute/cuda/10.2/Prod/local_installers/cuda_10.2.89_440.33.01_linux.runsudo
文件夹会存放在主目录中,在cuda_10.2.89_440.33.01_linux.run存放目右键打开终端运行:
sh cuda_10.2.89_440.33.01_linux.run
选择continue:

选择accept:
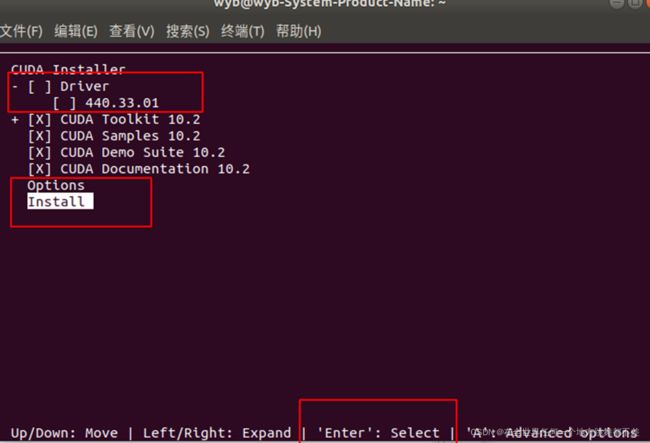
X代表安装,不选择driver后install:
同样的方法下载安装fix patch:
3.3 添加cuda路径
输入sudo gedit ~/.bashrc 打开.bashrc
在文件末尾添加:
export PATH=$PATH:$/usr/local/cuda-10.2/bin #根据CUDA版本更换路径
export LD_LIBRARY_PATH=/usr/local/cuda-10.2/lib64${LD_LIBRARY_PATH:+:${LD_LIBRARY_PATH}} #根据CUDA版本更换路径
保存并关闭.bashrc,在终端输入:
source ~/.bashrc
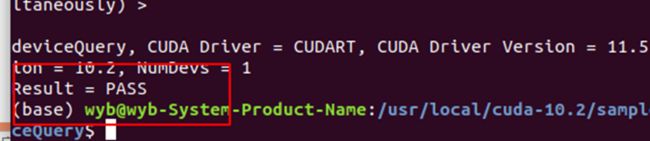
重启电脑验证cuda是否安装成功:
cd /usr/local/cuda-10.2/samples/1_Utilities/deviceQuery
sudo make
sudo ./deviceQuery
出现pass说明安装成功:
4. 安装cudnn
cudnn官网 :https://developer.nvidia.com/rdp/cudnn-archive
需要注册账号,有很多cuda10.2适配的cudnn,下载两个包:

然后在文件所在文件夹下运行命令:
sudo dpkg -i libcudnn8_8.0.5.39-1+cuda10.2_amd64.deb
sudo dpkg -i libcudnn8-dev_8.0.5.39-1+cuda10.2_amd64.deb
5 安装PyTorch
PyTorch官网:https://pytorch.org/get-started/locally/
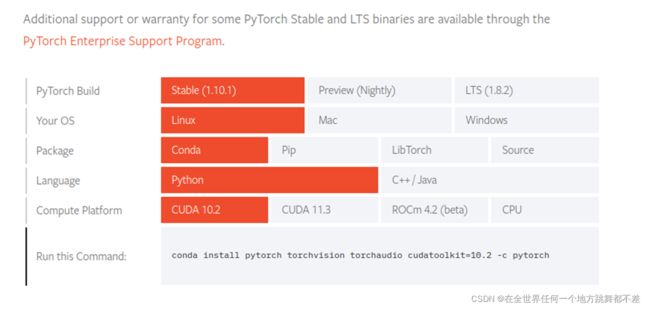
终端输入:
conda install pytorch torchvision torchaudio cudatoolkit=10.2 -c pytorch
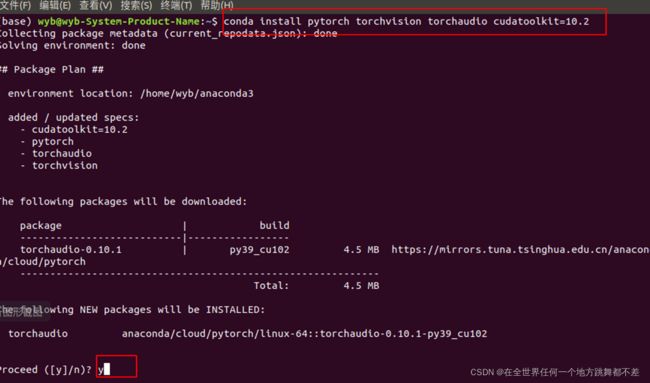
如果长时间连接不上,去掉-c pytorch,输入
conda install pytorch torchvision torchaudio cudatoolkit=10.2
还是连不上,修改Anaconda国内镜像,添加源(直接在命令行输入就行)
清华源:
conda config --add channels https://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/free/
conda config --add channels https://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/main/
conda config --set show_channel_urls yes
添加三方conda源:
conda config --add channels https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud/conda-forge/
conda config --add channels https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud/msys2/
conda config --add channels https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud/bioconda/
conda config --add channels https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud/menpo/
conda config --add channels https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud/pytorch/
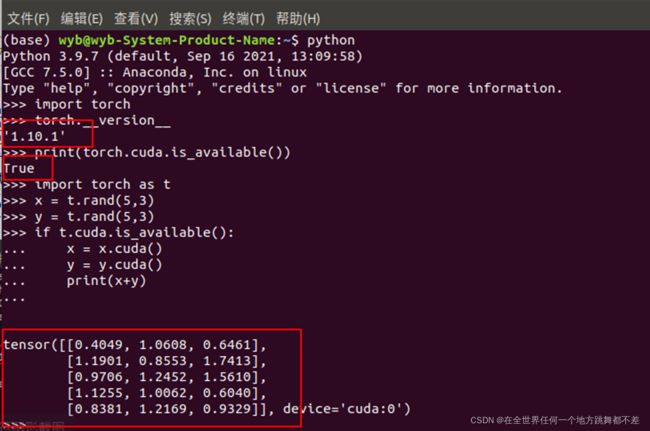
测试安装是否成功:
python
import torch
torch.__version__
查看是否可加速:
print(torch.cuda.is_available())
使用一个矩阵运算测试是否能正常运行:
import torch as t
x = t.rand(5,3)
y = t.rand(5,3)
if t.cuda.is_available():
x = x.cuda()
y = y.cuda()
print(x+y)
如果是下图这样的,说明PyTorch+GPU就安装成功了:
用yolov5训练自己的目标检测模型
1.克隆yolov5-5.0项目
2.安装依赖环境
在yolov5-5.0目录下运行:
pip install -r requirements.txt
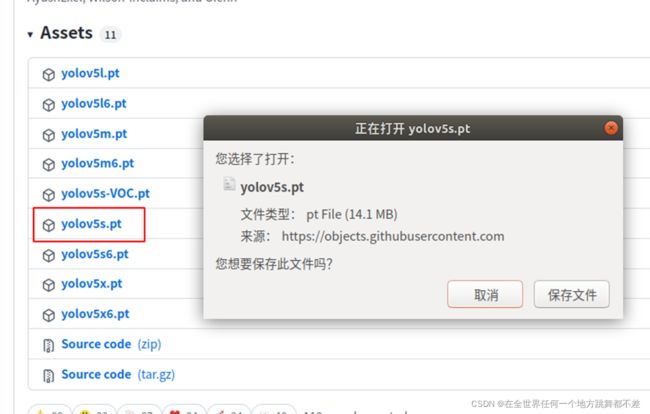
3. 下载预训练权重
3.1 下载 .pt : https://github.com/ultralytics/yolov5/releases/tag/v5.0 放在yolov5-5.0目录下
4 准备自己的数据集
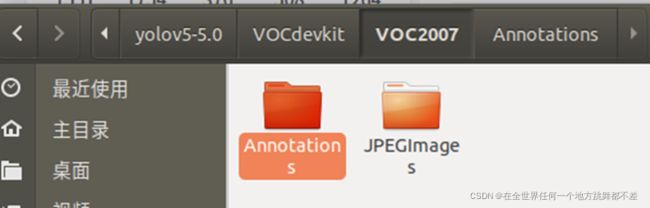
准备文件夹
yolov5-5.0/VOCdevkit/voc2007/Annotations里面存放着.xml格式的标签文件,
yolov5-5.0/VOCdevkit/voc2007JPEGImages里面存放着照片数据文件
yolov5-5.0/prepare.py将VOC标签格式.xml转yolo格式.txt并划分训练集和测试集:
prepare.py
import xml.etree.ElementTree as ET
import pickle
import os
from os import listdir, getcwd
from os.path import join
import random
from shutil import copyfile
classes = ["white","blue","red","yellow","orange","none"]
TRAIN_RATIO = 80
def clear_hidden_files(path):
dir_list = os.listdir(path)
for i in dir_list:
abspath = os.path.join(os.path.abspath(path), i)
if os.path.isfile(abspath):
if i.startswith("._"):
os.remove(abspath)
else:
clear_hidden_files(abspath)
def convert(size, box):
dw = 1./size[0]
dh = 1./size[1]
x = (box[0] + box[1])/2.0
y = (box[2] + box[3])/2.0
w = box[1] - box[0]
h = box[3] - box[2]
x = x*dw
w = w*dw
y = y*dh
h = h*dh
return (x,y,w,h)
def convert_annotation(image_id):
in_file = open('VOCdevkit/VOC2007/Annotations/%s.xml' %image_id)
out_file = open('VOCdevkit/VOC2007/YOLOLabels/%s.txt' %image_id, 'w')
tree=ET.parse(in_file)
root = tree.getroot()
size = root.find('size')
w = int(size.find('width').text)
h = int(size.find('height').text)
for obj in root.iter('object'):
difficult = obj.find('difficult').text
cls = obj.find('name').text
if cls not in classes or int(difficult) == 1:
continue
cls_id = classes.index(cls)
xmlbox = obj.find('bndbox')
b = (float(xmlbox.find('xmin').text), float(xmlbox.find('xmax').text), float(xmlbox.find('ymin').text), float(xmlbox.find('ymax').text))
bb = convert((w,h), b)
out_file.write(str(cls_id) + " " + " ".join([str(a) for a in bb]) + '\n')
in_file.close()
out_file.close()
wd = os.getcwd()
wd = os.getcwd()
data_base_dir = os.path.join(wd, "VOCdevkit/")
if not os.path.isdir(data_base_dir):
os.mkdir(data_base_dir)
work_sapce_dir = os.path.join(data_base_dir, "VOC2007/")
if not os.path.isdir(work_sapce_dir):
os.mkdir(work_sapce_dir)
annotation_dir = os.path.join(work_sapce_dir, "Annotations/")
if not os.path.isdir(annotation_dir):
os.mkdir(annotation_dir)
clear_hidden_files(annotation_dir)
image_dir = os.path.join(work_sapce_dir, "JPEGImages/")
if not os.path.isdir(image_dir):
os.mkdir(image_dir)
clear_hidden_files(image_dir)
yolo_labels_dir = os.path.join(work_sapce_dir, "YOLOLabels/")
if not os.path.isdir(yolo_labels_dir):
os.mkdir(yolo_labels_dir)
clear_hidden_files(yolo_labels_dir)
yolov5_images_dir = os.path.join(data_base_dir, "images/")
if not os.path.isdir(yolov5_images_dir):
os.mkdir(yolov5_images_dir)
clear_hidden_files(yolov5_images_dir)
yolov5_labels_dir = os.path.join(data_base_dir, "labels/")
if not os.path.isdir(yolov5_labels_dir):
os.mkdir(yolov5_labels_dir)
clear_hidden_files(yolov5_labels_dir)
yolov5_images_train_dir = os.path.join(yolov5_images_dir, "train/")
if not os.path.isdir(yolov5_images_train_dir):
os.mkdir(yolov5_images_train_dir)
clear_hidden_files(yolov5_images_train_dir)
yolov5_images_test_dir = os.path.join(yolov5_images_dir, "val/")
if not os.path.isdir(yolov5_images_test_dir):
os.mkdir(yolov5_images_test_dir)
clear_hidden_files(yolov5_images_test_dir)
yolov5_labels_train_dir = os.path.join(yolov5_labels_dir, "train/")
if not os.path.isdir(yolov5_labels_train_dir):
os.mkdir(yolov5_labels_train_dir)
clear_hidden_files(yolov5_labels_train_dir)
yolov5_labels_test_dir = os.path.join(yolov5_labels_dir, "val/")
if not os.path.isdir(yolov5_labels_test_dir):
os.mkdir(yolov5_labels_test_dir)
clear_hidden_files(yolov5_labels_test_dir)
train_file = open(os.path.join(wd, "yolov5_train.txt"), 'w')
test_file = open(os.path.join(wd, "yolov5_val.txt"), 'w')
train_file.close()
test_file.close()
train_file = open(os.path.join(wd, "yolov5_train.txt"), 'a')
test_file = open(os.path.join(wd, "yolov5_val.txt"), 'a')
list_imgs = os.listdir(image_dir) # list image files
prob = random.randint(1, 100)
print("Probability: %d" % prob)
for i in range(0,len(list_imgs)):
path = os.path.join(image_dir,list_imgs[i])
if os.path.isfile(path):
image_path = image_dir + list_imgs[i]
voc_path = list_imgs[i]
(nameWithoutExtention, extention) = os.path.splitext(os.path.basename(image_path))
(voc_nameWithoutExtention, voc_extention) = os.path.splitext(os.path.basename(voc_path))
annotation_name = nameWithoutExtention + '.xml'
annotation_path = os.path.join(annotation_dir, annotation_name)
label_name = nameWithoutExtention + '.txt'
label_path = os.path.join(yolo_labels_dir, label_name)
prob = random.randint(1, 100)
print("Probability: %d" % prob)
if(prob < TRAIN_RATIO): # train dataset
if os.path.exists(annotation_path):
train_file.write(image_path + '\n')
convert_annotation(nameWithoutExtention) # convert label
copyfile(image_path, yolov5_images_train_dir + voc_path)
copyfile(label_path, yolov5_labels_train_dir + label_name)
else: # test dataset
if os.path.exists(annotation_path):
test_file.write(image_path + '\n')
convert_annotation(nameWithoutExtention) # convert label
copyfile(image_path, yolov5_images_test_dir + voc_path)
copyfile(label_path, yolov5_labels_test_dir + label_name)
train_file.close()
test_file.close()
运行后产生文件夹:
yolov5-5.0/VOCdevkit/images: 分为train和val两个文件夹,存放图片
yolov5-5.0/VOCdevkit/labels: 分为train和val两个文件夹,存放.txt label
5 写自己的配置文件
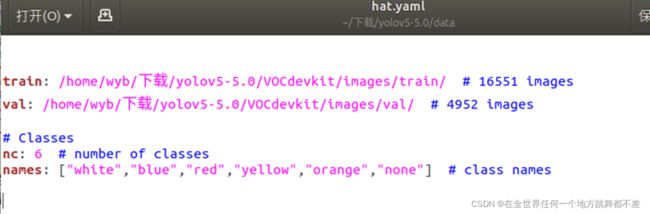
5.1 写自己的数据配置文件data/hat.yaml
train: /home/wyb/下载/yolov5-5.0/VOCdevkit/images/train/ # 16551 images
val: /home/wyb/下载/yolov5-5.0/VOCdevkit/images/val/ # 4952 images
# Classes
nc: 6 # number of classes
names: ["white","blue","red","yellow","orange","none"] # class names
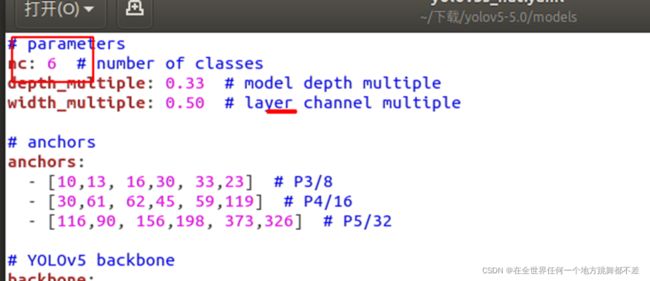
5.2 写自己的模型配置文件models/yolov5s_hat.yaml
只需要修改nc :
6 训练自己的模型
运行yolov5-5.0/train.py 修改这些就可以跑自己的模型了:
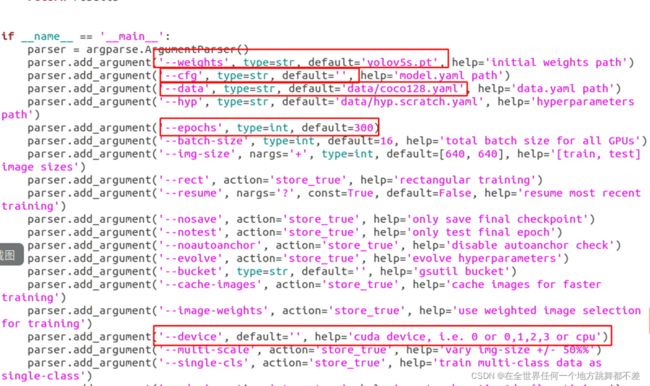
python train.py --weights yolov5s.pt --cfg models/yolov5s_hat.yaml --data data/hat.yaml --epochs 185 --device 0
会先显示一些配置信息:
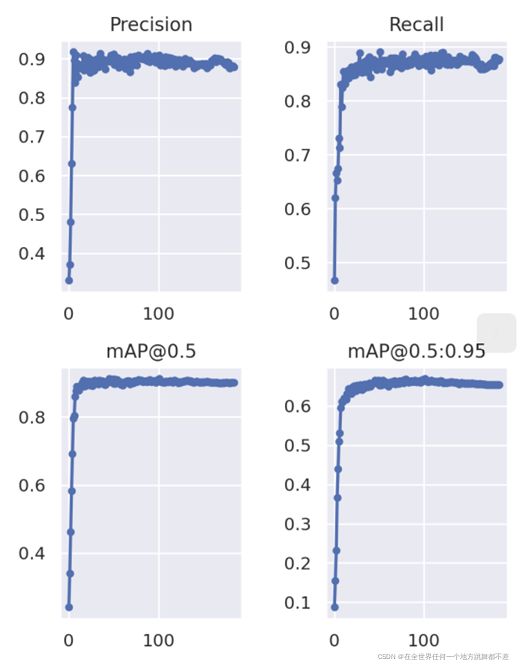
然后开始训练:
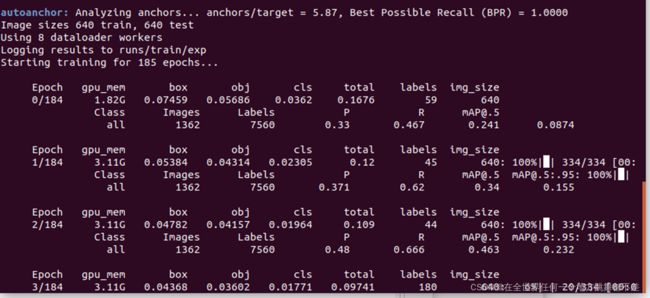
6696张图片,185 epoch, 训练时间是2h+,训练好的模型是runs/train/exp/best.pt,

7 利用训练好的模型检测图片
查看修改detect.py接口 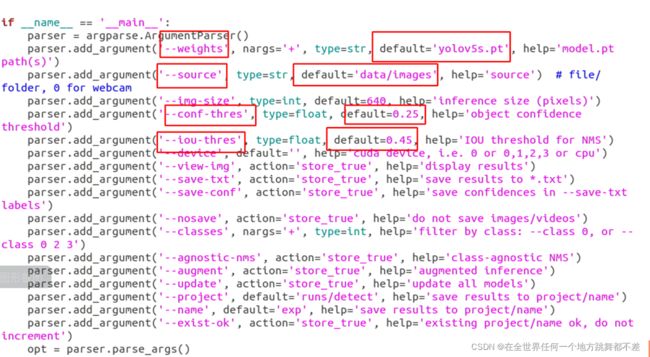
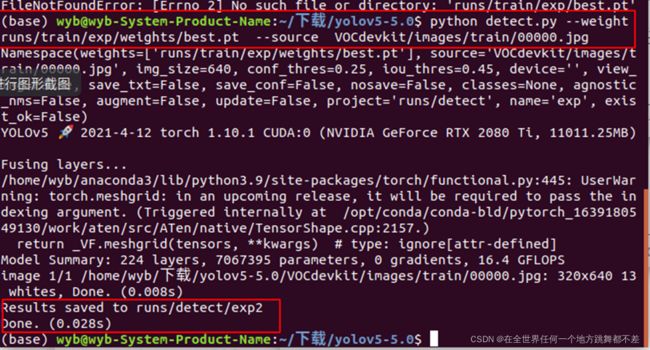
运行detect.py:
python detect.py
--weight runs/train/exp/weights/best.pt
--source VOCdevkit/images/train/00000.jpg
检测结果保存在runs/detect文件夹下:
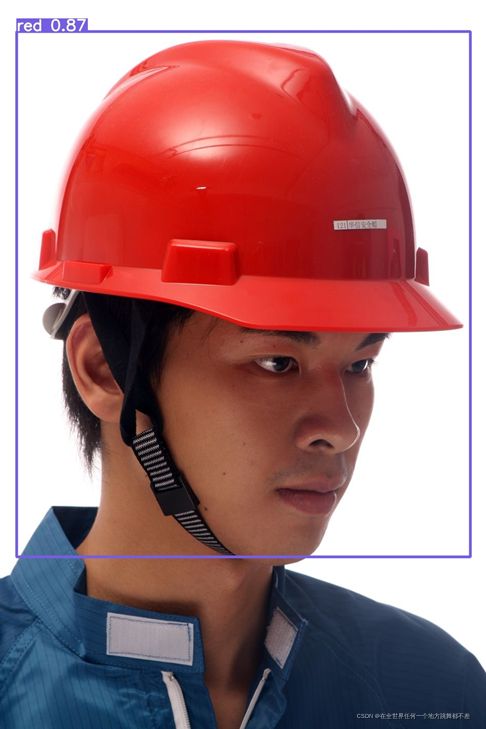
一些检测结果:

yolov5+TNN推理框架部署到windows上
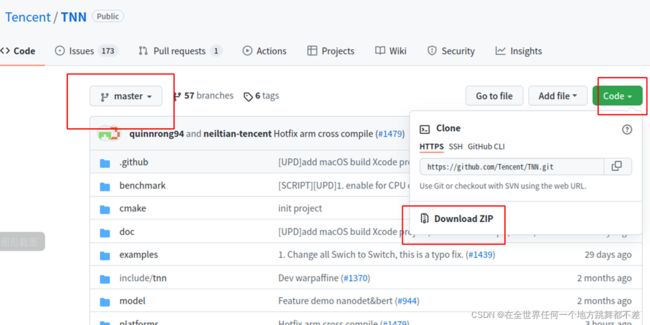
1.下载tnn-master项目
TNN-master : https://github.com/Tencent/TNN
2.将.pt转换成tnn模型(在ubuntu18.04系统完成)
2.1 将.pt转换成ONNX
安装ONNX:
pip3 install onnx
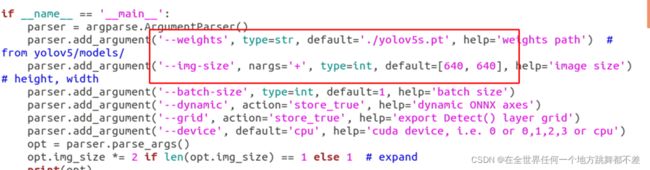
把yolov5-5.0/models/export.py中的export.py复制到yolov5-5.0下,查看接口:
运行:
python export.py --weight runs/train/exp/weights/best.pt
如下图说明转换成功:

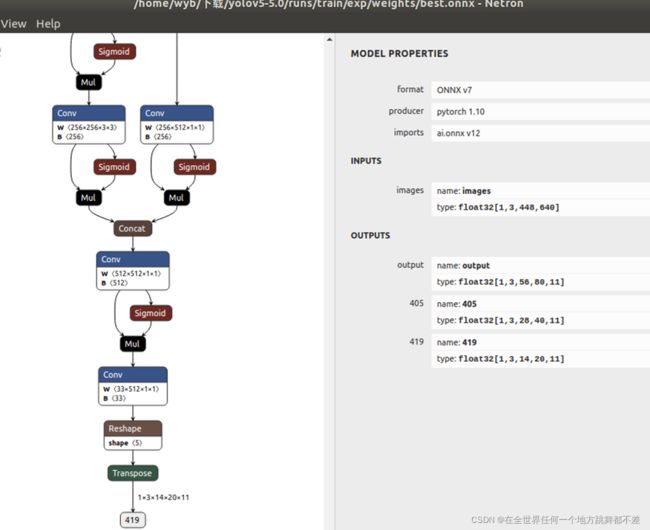
用netron可视化ONNX:
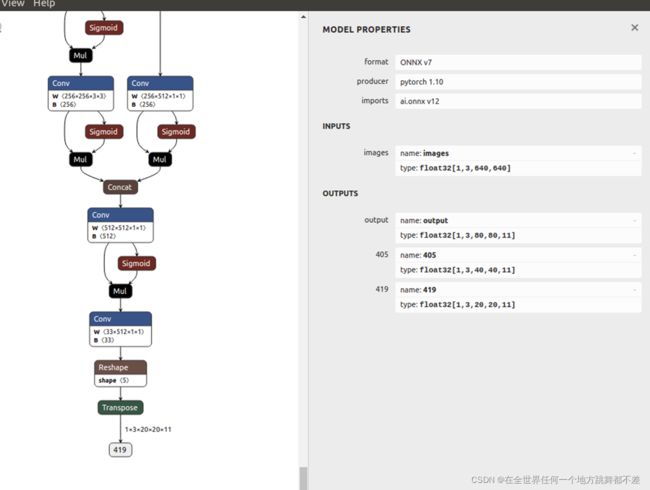
可以在export.py文件中修改img-size为[448,640],利用tnn部署到wndows上结果要好些:
3.将ONNX转换成tnn模型
按照官方文档,利用 Convert2tnn Docker。

安装docker:
sudo apt install docker.io
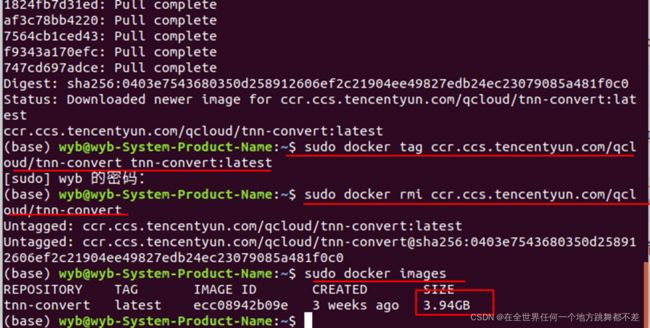
拉镜像并修改镜像名称:
sudo docker pull ccr.ccs.tencentyun.com/qcloud/tnn-convert
sudo docker tag ccr.ccs.tencentyun.com/qcloud/tnn-convert tnn-convert:latest
sudo docker rmi ccr.ccs.tencentyun.com/qcloud/tnn-convert
sudo docker images
把yolov5所在文件夹挂载到 docker 容器中的 "/workspace” 文件夹下面:
cd /home/wyb/下载
sudo docker run --volume=$(pwd):/workspace -it tnn-convert:latest
查看:
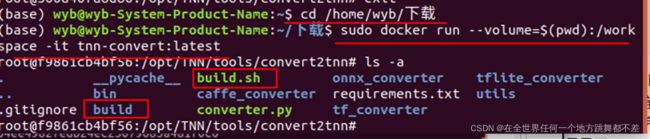
如果没有build文件夹,需要先./build.sh。
建议用自己下载的/home/wyb/下载/ TNN-master, 挂载后的地址是/workspace/TNN-master,
cd /workspace/TNN-master/tools/convert2tnn 成功build后:

将ONNX转换成tnnmodel:
python3 converter.py onnx2tnn /workspace/yolov5-5.0/runs/train/exp/weights/best640/best.onnx
会在best.onnx所在目录下生成best.tnnproto和best.tnnmodel两个文件,分别可以用TextPad查看和netron查看。
4 windows+cpu环境编译tnn
4.1 环境要求
依赖库
- Visual Studio (2017 及更高版本)
- cmake (把3.11及以上版本cmake加入环境变量或使用 Visual
Studio 自带cmake) - ninja (编译速度更快,可以使用choco安装)
4.2.编译步骤
打开 x64 Native Tools Command Prompt for VS 2017/2019,如果想要编译32位的库,打开 x86 Native Tools Command Prompt for VS 2017/2019
切换到脚本目录
cd <path_to_tnn>/scripts
执行编译脚本
编译不带openvino的版本
.\build_msvc_native.bat
编译带openvino的版本
.\build_msvc.bat
openvino只能编译成64位的库.
运行前要先设置opencv的路径
set OpenCV_DIR ='F:/opencv/build'
编译成功后:
生成文件夹scripts/build_win,包含TNN.lib和TNN.dll等文件。
5 在VS2019上运行推理程序
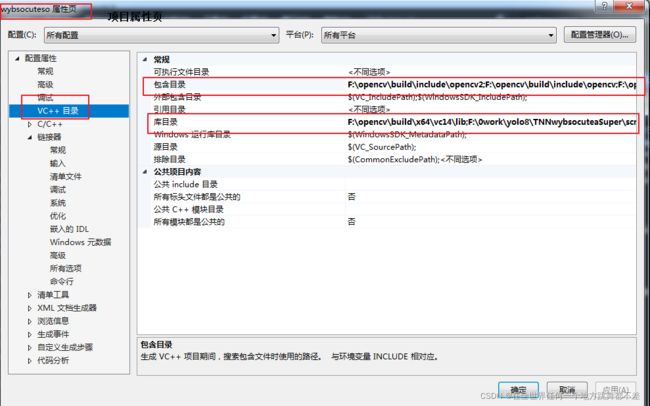
5.1 添加路径和库
添加包含路径:
<TNN_DIR>\include
<TNN_DIR>
<OpenCV_DIR>\include
<OpenCV_DIR>\include\opencv
<OpenCV_DIR>\include\opencv2
添加库路径:
<TNN_DIR>\scripts\build_win
<OpenCV_DIR>\x64\vc14\lib
TNN-master文件夹所在路径,opencv/build文件夹路径。
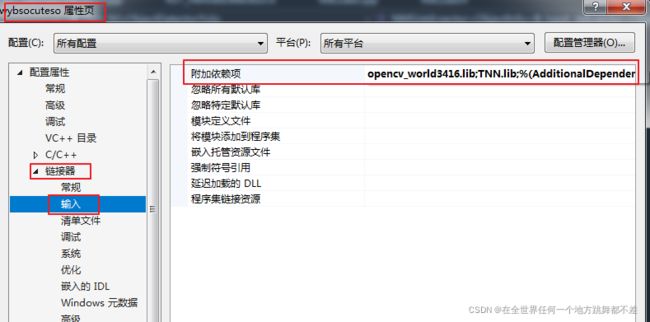
添加库:
opencv_world3416.lib
TNN.lib
5.2 代码
yolo.h
#pragma once
#include "tnn/core/tnn.h"
#include "tnn/utils/blob_converter.h"
#include "tnn/utils/mat_utils.h"
#include "tnn/utils/dims_vector_utils.h"
namespace TNN_NS
{
struct ObjectInfo {
int nImage_width = 0;
int nImage_height = 0;
float x1 = 0;
float y1 = 0;
float x2 = 0;
float y2 = 0;
float score = 0.;
int nClass_id = -1;
};
struct ImageInfo {
ImageInfo();
ImageInfo(std::shared_ptr<Mat>mat);
ImageInfo(const ImageInfo &info);
int nImage_width = 0;
int nImage_height = 0;
int nImage_channel = 0;
std::shared_ptr<char> data; // 4-channel image data
};
struct RGBA
{
RGBA(int nR = 0, int nG = 0, int nB = 0, int nA = 0) : m_r(nR), m_g(nG), m_b(nB),m_a(nA) {}
unsigned char m_r,m_g, m_b, m_a;
};
extern const std::string kTNNSDKDefaultName;
class ObjectDetectorYoloInput
{
public:
ObjectDetectorYoloInput(std::shared_ptr<TNN_NS::Mat> mat = nullptr);
virtual ~ObjectDetectorYoloInput();
bool IsEmpty();
std::shared_ptr<TNN_NS::Mat> GetMat(std::string strName = kTNNSDKDefaultName);
bool AddMat(std::shared_ptr<TNN_NS::Mat> mat, std::string strName);
protected:
std::map<std::string, std::shared_ptr<TNN_NS::Mat> > m_mat_map= {};
};
class ObjectDetectorYoloOutput : public ObjectDetectorYoloInput
{
public:
ObjectDetectorYoloOutput(std::shared_ptr<Mat> mat = nullptr) : ObjectDetectorYoloInput(mat) {};
virtual ~ObjectDetectorYoloOutput();
std::vector<ObjectInfo> m_vctObject_list;
};
class ObjectDetectorYoloOption
{
public:
ObjectDetectorYoloOption();
virtual ~ObjectDetectorYoloOption();
std::string m_strProto_content = "";
std::string m_strModel_content = "";
InputShapesMap m_input_shapes = {};
};
class ObjectDetectorYolo
{
public:
ObjectDetectorYolo();
virtual ~ObjectDetectorYolo();
virtual DimsVector GetInputShape(std::string strName= kTNNSDKDefaultName);
virtual MatType GetOutputMatType(std::string strName = "");
virtual Status Init(std::shared_ptr< ObjectDetectorYoloOption> option);
virtual Status Predict(std::shared_ptr<ObjectDetectorYoloInput> input, std::shared_ptr<ObjectDetectorYoloOutput> &output);
virtual MatConvertParam GetConvertParamForOutput(std::string strName = "");
virtual Status GetCommandQueue(void **command_queue);
Status Resize(std::shared_ptr<TNN_NS::Mat> src, std::shared_ptr<TNN_NS::Mat> dst);
virtual MatConvertParam GetConvertParamForInput(std::string strName = "");
virtual std::shared_ptr<ObjectDetectorYoloOutput> CreateSDKOutput();
virtual Status ProcessSDKOutput(std::shared_ptr<ObjectDetectorYoloOutput> output);
std::shared_ptr<Mat> ResizeToInputShape(std::shared_ptr<Mat> input_mat, std::string strName);
private:
std::vector<std::string> GetOutputNames();
void GenerateDetectResult(std::vector<std::shared_ptr<Mat> >outputs, std::vector<ObjectInfo> &detects,
int image_width, int image_height);
void NMS(std::vector<ObjectInfo> &objs, std::vector<ObjectInfo> &results);
void PostProcessMat(std::vector<std::shared_ptr<Mat> >outputs, std::vector<std::shared_ptr<Mat> > &post_mats);
private:
std::shared_ptr<TNN> m_net = nullptr;
std::shared_ptr<Instance> m_instance= nullptr;
std::shared_ptr< ObjectDetectorYoloOption> m_option = nullptr;
float conf_thres = 0.1;
float iou_thres = 0.25;
// yolov5s model configurations
std::vector<float> m_strides= { 32.f, 16.f, 8.f };
std::vector<float> m_anchor_grids= { 116.f, 90.f, 156.f, 188.f, 373.f, 326.f, \
30.f, 61.f, 62.f, 45.f, 59.f, 119.f, \
10.f, 13.f, 16.f, 30.f, 33.f, 23.f };
float m_iou_threshold= 0.25f;
int m_num_anchor = 3;
int m_detect_dim = 11;
int m_grid_per_input= 6;
};
} // namespace TNN_NS
yolo.cpp
#include "yolo.h"
namespace TNN_NS {
const std::string kTNNSDKDefaultName = "TNN.sdk.default.name";
ImageInfo::ImageInfo() : nImage_width(0), nImage_height(0), nImage_channel(0), data(nullptr)
{
NULL;
}
ImageInfo::ImageInfo(const ImageInfo &info)
{
nImage_width = info.nImage_width;
nImage_height = info.nImage_height;
nImage_channel = info.nImage_channel;
data = info.data;
}
ImageInfo::ImageInfo(std::shared_ptr<Mat>image)
{
if (image != nullptr) {
const auto &dims = image->GetDims();
nImage_channel = dims[1];
nImage_height = dims[2];
nImage_width = dims[3];
auto count = DimsVectorUtils::Count(dims);
data.reset(new char[count]);
memcpy(data.get(), image->GetData(), count);
}
}
#pragma mark - ObjectDetectorYoloInput
ObjectDetectorYoloInput::ObjectDetectorYoloInput(std::shared_ptr<TNN_NS::Mat> mat)
{
if (mat)
{
m_mat_map[kTNNSDKDefaultName] = mat;
}
}
ObjectDetectorYoloInput::~ObjectDetectorYoloInput() {}
bool ObjectDetectorYoloInput::IsEmpty()
{
if (m_mat_map.size() <= 0)
{
return true;
}
return false;
}
bool ObjectDetectorYoloInput::AddMat(std::shared_ptr<TNN_NS::Mat> mat, std::string name)
{
if (name.empty() || !mat)
{
return false;
}
m_mat_map[name] = mat;
return true;
}
std::shared_ptr<TNN_NS::Mat> ObjectDetectorYoloInput::GetMat(std::string name)
{
std::shared_ptr<TNN_NS::Mat> mat = nullptr;
if (name == kTNNSDKDefaultName && m_mat_map.size() > 0)
{
return m_mat_map.begin()->second;
}
if (m_mat_map.find(name) != m_mat_map.end()) {
mat = m_mat_map[name];
}
return mat;
}
#pragma mark - ObjectDetectorYoloOption
ObjectDetectorYoloOption::ObjectDetectorYoloOption() {}
ObjectDetectorYoloOption::~ObjectDetectorYoloOption() {}
#pragma mark - ObjectDetectorYolo
ObjectDetectorYolo::ObjectDetectorYolo() {}
ObjectDetectorYolo::~ObjectDetectorYolo() {}
Status ObjectDetectorYolo::GetCommandQueue(void **command_queue)
{
if (m_instance)
{
return m_instance->GetCommandQueue(command_queue);
}
return Status(TNNERR_INST_ERR, "instance_ GetCommandQueue return nil");
}
Status ObjectDetectorYolo::Resize(std::shared_ptr<TNN_NS::Mat> src, std::shared_ptr<TNN_NS::Mat> dst/*, TNNInterpType interp_type*/)
{
Status status = TNN_OK;
void *command_queue = nullptr;
status = GetCommandQueue(&command_queue);
if (status != TNN_NS::TNN_OK)
{
LOGE("getCommandQueue failed with:%s\n", status.description().c_str());
return status;
}
ResizeParam param;
param.type = TNN_NS::INTERP_TYPE_LINEAR;
auto dst_dims = dst->GetDims();
auto src_dims = src->GetDims();
param.scale_w = dst_dims[3] / static_cast<float>(src_dims[3]);
param.scale_h = dst_dims[2] / static_cast<float>(src_dims[2]);
status = MatUtils::Resize(*(src.get()), *(dst.get()), param, command_queue);
if (status != TNN_NS::TNN_OK) {
LOGE("resize failed with:%s\n", status.description().c_str());
}
return status;
}
TNN_NS::Status ObjectDetectorYolo::Init(std::shared_ptr< ObjectDetectorYoloOption> option)
{
m_option = option;
TNN_NS::Status status;
if (!m_net)
{
TNN_NS::ModelConfig config;
config.model_type = TNN_NS::MODEL_TYPE_TNN;
config.params = { option->m_strProto_content, option->m_strModel_content};
auto net = std::make_shared<TNN_NS::TNN>();
status = net->Init(config);
if (status != TNN_NS::TNN_OK) {
LOGE("instance.net init failed %d", (int)status);
return status;
}
m_net = net;
}
//创建实例instance
{
TNN_NS::NetworkConfig network_config;
network_config.device_type = TNN_NS::DEVICE_X86;
network_config.cache_path = "/sdcard/";
std::shared_ptr<TNN_NS::Instance> instance;
instance = m_net->CreateInst(network_config, status, option->m_input_shapes);
m_instance = instance;
}
return status;
}
DimsVector ObjectDetectorYolo::GetInputShape(std::string name)
{
DimsVector shape = {};
BlobMap blob_map = {};
if (m_instance)
{
m_instance->GetAllInputBlobs(blob_map);
}
if (kTNNSDKDefaultName == name && blob_map.size() > 0)
{
if (blob_map.begin()->second)
{
shape = blob_map.begin()->second->GetBlobDesc().dims;
}
}
if (blob_map.find(name) != blob_map.end() && blob_map[name])
{
shape = blob_map[name]->GetBlobDesc().dims;
}
return shape;
}
MatType ObjectDetectorYolo::GetOutputMatType(std::string name)
{
if (m_instance)
{
BlobMap output_blobs;
m_instance->GetAllOutputBlobs(output_blobs);
auto blob = name == "" ? output_blobs.begin()->second : output_blobs[name];
}
return NCHW_FLOAT;
}
std::vector<std::string> ObjectDetectorYolo::GetOutputNames()
{
std::vector<std::string> names;
if (m_instance)
{
BlobMap blob_map;
m_instance->GetAllOutputBlobs(blob_map);
for (const auto &item : blob_map)
{
names.push_back(item.first);
}
}
return names;
}
std::shared_ptr<Mat> ObjectDetectorYolo::ResizeToInputShape(std::shared_ptr<Mat> input_mat, std::string name)
{
auto target_dims =GetInputShape(name);
auto input_height = input_mat->GetHeight();
auto input_width = input_mat->GetWidth();
if (target_dims.size() >= 4 &&
(input_height != target_dims[2] || input_width != target_dims[3]))
{
auto target_mat = std::make_shared<TNN_NS::Mat>(input_mat->GetDeviceType(),
input_mat->GetMatType(), target_dims);
auto status = Resize(input_mat, target_mat);
if (status == TNN_OK)
{
return target_mat;
}
else
{
LOGE("%s\n", status.description().c_str());
return nullptr;
}
}
return input_mat;
}
TNN_NS::MatConvertParam ObjectDetectorYolo::GetConvertParamForOutput(std::string name)
{
return TNN_NS::MatConvertParam();
}
TNN_NS::Status ObjectDetectorYolo::Predict(std::shared_ptr<ObjectDetectorYoloInput> input, std::shared_ptr<ObjectDetectorYoloOutput> &output)
{
Status status = TNN_OK;
if (!input || input->IsEmpty())
{
status = Status(TNNERR_PARAM_ERR, "input image is empty ,please check!");
LOGE("input image is empty ,please check!\n");
return status;
}
// step 1. set input mat
auto input_mat = input->GetMat();
input_mat = ResizeToInputShape(input_mat, "");
auto input_convert_param = GetConvertParamForInput();
status = m_instance->SetInputMat(input_mat, input_convert_param);
RETURN_ON_NEQ(status, TNN_NS::TNN_OK);
// step 2. Forward
status = m_instance->ForwardAsync(nullptr);
if (status != TNN_NS::TNN_OK)
{
LOGE("instance.Forward Error: %s\n", status.description().c_str());
return status;
}
// step 3. get output mat
auto input_device_type = input->GetMat()->GetDeviceType();
output = CreateSDKOutput();
auto output_names = GetOutputNames();
if (output_names.size() == 1)
{
auto output_convert_param = GetConvertParamForOutput();
std::shared_ptr<TNN_NS::Mat> output_mat = nullptr;
status = m_instance->GetOutputMat(output_mat, output_convert_param, "",DEVICE_X86, GetOutputMatType());
RETURN_ON_NEQ(status, TNN_NS::TNN_OK);
output->AddMat(output_mat, output_names[0]);
}
else
{
for (auto name : output_names)
{
auto output_convert_param = GetConvertParamForOutput(name);
std::shared_ptr<TNN_NS::Mat> output_mat = nullptr;
status = m_instance->GetOutputMat(output_mat, output_convert_param, name, DEVICE_X86, GetOutputMatType(/*name*/));
RETURN_ON_NEQ(status, TNN_NS::TNN_OK);
output->AddMat(output_mat, name);
}
}
ProcessSDKOutput(output);
return status;
}
ObjectDetectorYoloOutput::~ObjectDetectorYoloOutput() {}
std::shared_ptr<ObjectDetectorYoloOutput> ObjectDetectorYolo::CreateSDKOutput()
{
return std::make_shared<ObjectDetectorYoloOutput>();
}
MatConvertParam ObjectDetectorYolo::GetConvertParamForInput(std::string name)
{
MatConvertParam input_convert_param;
input_convert_param.scale = { 1.0 / 255, 1.0 / 255, 1.0 / 255, 0 };
input_convert_param.bias = { 0.0, 0.0, 0.0, 0.0 };
return input_convert_param;
}
Status ObjectDetectorYolo::ProcessSDKOutput(std::shared_ptr<ObjectDetectorYoloOutput> output_)
{
Status status = TNN_OK;
auto output = dynamic_cast<ObjectDetectorYoloOutput *>(output_.get());
RETURN_VALUE_ON_NEQ(!output, false, Status(TNNERR_PARAM_ERR, "TNNSDKOutput is invalid"));
auto output_mat_0 = output->GetMat("419");
RETURN_VALUE_ON_NEQ(!output_mat_0, false, Status(TNNERR_PARAM_ERR, "GetMat is invalid"));
auto output_mat_1 = output->GetMat("405");
RETURN_VALUE_ON_NEQ(!output_mat_1, false, Status(TNNERR_PARAM_ERR, "GetMat is invalid"));
auto output_mat_2 = output->GetMat("output");
RETURN_VALUE_ON_NEQ(!output_mat_2, false, Status(TNNERR_PARAM_ERR, "GetMat is invalid"));
auto input_shape = GetInputShape();
RETURN_VALUE_ON_NEQ(input_shape.size() == 4, true,
Status(TNNERR_PARAM_ERR, "GetInputShape is invalid"));
std::vector<ObjectInfo> object_list;
GenerateDetectResult({ output_mat_0, output_mat_1, output_mat_2 }, object_list, input_shape[3], input_shape[2]);
output->m_vctObject_list = object_list;
return status;
}
void ObjectDetectorYolo::NMS(std::vector<ObjectInfo> &input, std::vector<ObjectInfo> &output)
{
std::sort(input.begin(), input.end(), [](const ObjectInfo &a, const ObjectInfo &b) { return a.score > b.score; });
output.clear();
int box_num = input.size();
std::vector<int> merged(box_num, 0);
for (int i = 0; i < box_num; i++)
{
if (merged[i])
{
continue;
}
std::vector<ObjectInfo> buf;
buf.push_back(input[i]);
merged[i] = 1;
float area0 = (input[i].y2 - input[i].y1 + 1) * (input[i].x2 - input[i].x1 + 1);
for (int j = i + 1; j < box_num; j++)
{
if (merged[j])
{
continue;
}
float inner_x0 = input[i].x1 > input[j].x1 ? input[i].x1 : input[j].x1;
float inner_y0 = input[i].y1 > input[j].y1 ? input[i].y1 : input[j].y1;
float inner_x1 = input[i].x2 < input[j].x2 ? input[i].x2 : input[j].x2;
float inner_y1 = input[i].y2 < input[j].y2 ? input[i].y2 : input[j].y2;
float inner_h = inner_y1 - inner_y0 + 1;
float inner_w = inner_x1 - inner_x0 + 1;
if (inner_h <= 0 || inner_w <= 0)
{
continue;
}
float inner_area = inner_h * inner_w;
float area1 =(input[j].y2 - input[j].y1 + 1) * (input[j].x2 - input[j].x1 + 1);
float score = inner_area / (area0 + area1 - inner_area);
if (score > m_iou_threshold)
{
merged[j] = 1;
buf.push_back(input[j]);
}
}
output.push_back(buf[0]);
}
}
void ObjectDetectorYolo::PostProcessMat(std::vector<std::shared_ptr<Mat> >outputs, std::vector<std::shared_ptr<Mat> > &post_mats)
{
for (auto &output : outputs) {
auto dims = output->GetDims();
auto h_stride = DimsVectorUtils::Count(dims, 2);
auto w_stride = DimsVectorUtils::Count(dims, 3);
DimsVector permute_dims = { dims[0], dims[2], dims[3], dims[1] * dims[4] }; // batch, height, width, anchor*detect_dim
auto mat = std::make_shared<Mat>(output->GetDeviceType(), output->GetMatType(), permute_dims);
float *src_data = reinterpret_cast<float *>(output->GetData());
float *dst_data = reinterpret_cast<float *>(mat->GetData());
int out_idx = 0;
for (int h = 0; h < permute_dims[1]; h++) {
for (int w = 0; w < permute_dims[2]; w++) {
for (int s = 0; s < permute_dims[3]; s++) {
int anchor_idx = s / dims[4];
int detect_idx = s % dims[4];
int in_idx = anchor_idx * h_stride + h * w_stride + w * dims[4] + detect_idx;
dst_data[out_idx++] = 1.0f / (1.0f + exp(-src_data[in_idx]));
}
}
}
post_mats.emplace_back(mat);
}
}
void ObjectDetectorYolo::GenerateDetectResult(std::vector<std::shared_ptr<Mat> >outputs,
std::vector<ObjectInfo> &detecs, int image_width, int image_height)
{
std::vector<ObjectInfo> extracted_objs;
int blob_index = 0;
std::vector<std::shared_ptr<Mat>> post_mats;
PostProcessMat(outputs, post_mats);
auto output_mats = post_mats;
for (auto &output : output_mats)
{
auto dim = output->GetDims();
if (dim[3] != m_num_anchor * m_detect_dim)
{
LOGE("Invalid detect output, the size of last dimension is: %d\n", dim[3]);
return;
}
float *data = static_cast<float *>(output->GetData());
int num_potential_detecs = dim[1] * dim[2] * m_num_anchor;
for (int i = 0; i < num_potential_detecs; ++i)
{
float x = data[i * m_detect_dim + 0];
float y = data[i * m_detect_dim + 1];
float width = data[i * m_detect_dim + 2];
float height = data[i * m_detect_dim + 3];
float objectness = data[i * m_detect_dim + 4];
if (objectness < conf_thres)
{
continue;
}
//center point coord
x = (x * 2 - 0.5 + ((i / m_num_anchor) % dim[2])) * m_strides[blob_index];
y = (y * 2 - 0.5 + ((i / m_num_anchor) / dim[2]) % dim[1]) * m_strides[blob_index];
width = pow((width * 2), 2) * m_anchor_grids[blob_index * m_grid_per_input + (i % m_num_anchor) * 2 + 0];
height = pow((height * 2), 2) * m_anchor_grids[blob_index * m_grid_per_input + (i % m_num_anchor) * 2 + 1];
// compute coords
float x1 = x - width / 2;
float y1 = y - height / 2;
float x2 = x + width / 2;
float y2 = y + height / 2;
// compute confidence
auto conf_start = data + i * m_detect_dim + 5;
auto conf_end = data + (i + 1) * m_detect_dim;
auto max_conf_iter = std::max_element(conf_start, conf_end);
int conf_idx = static_cast<int>(std::distance(conf_start, max_conf_iter));
float score = (*max_conf_iter) * objectness;
ObjectInfo obj_info;
obj_info.nImage_width = image_width;
obj_info.nImage_height = image_height;
obj_info.x1 = x1;
obj_info.y1 = y1;
obj_info.x2 = x2;
obj_info.y2 = y2;
obj_info.score = score;
obj_info.nClass_id = conf_idx;
extracted_objs.push_back(obj_info);
}
blob_index += 1;
}
NMS(extracted_objs, detecs);
}
}//TNN_NS
RST_HelmetDetection.h
#pragma once
#include RST_HelmetDetection.cpp
#define _CRT_SECURE_NO_WARNINGS
#include fileLoad.h
#pragma once
#include "yolo.h"
std::string fdLoadFile(std::string strPath);
void getAllFiles(std::string strPath, std::vector<std::string> &vecFilePaths, std::vector<std::string> &vecFileNames, std::string strFormat);
void retangle(int nxmin, int nxmax, int nymin, int nymax, int nimage_height, int nimage_width, TNN_NS::RGBA *image_rgba, int nr, int ng, int nb, int na);
void Rectangle(const std::string strLabel_list[], TNN_NS::ObjectInfo object, void *data_rgba, int nimage_height, int nimage_width,
int nx0, int ny0, int nx1, int ny1, float fscale_x, float fscale_y);
fileLoad.cpp
#define _CRT_SECURE_NO_WARNINGS
#include main.cpp
#define _CRT_SECURE_NO_WARNINGS
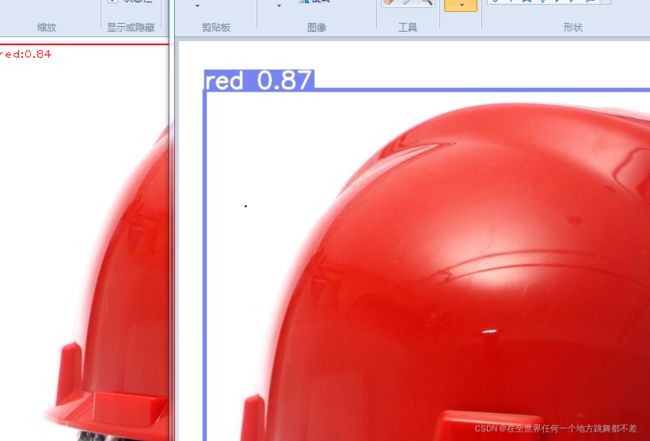
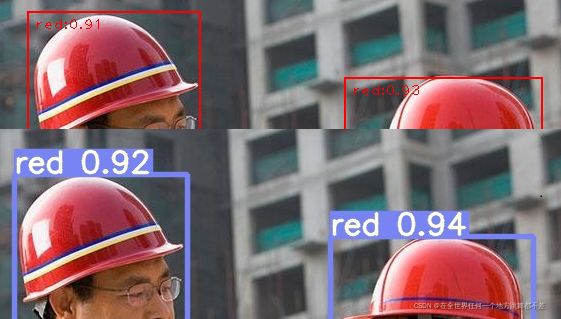
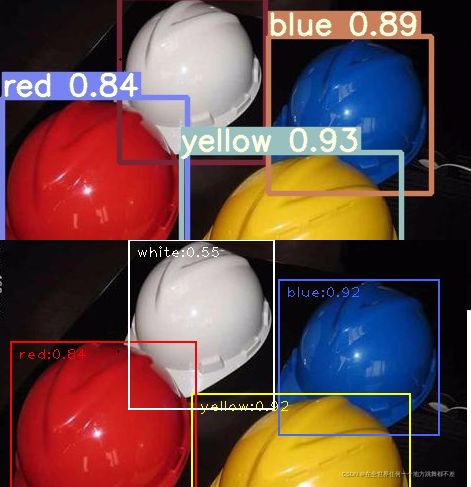
#include 5.3 一些比较和分析
1 模型部署到windows上后,测试结果和和yolov5 detetct.py运行结果大部分情况下是一致的(可信度的差异在0.1),通常是直接运行detetct.py的置信度更大。
00000.
000024.

00001
00000.

000002
000003

(网图)

(网图)
(网图)

(网图)

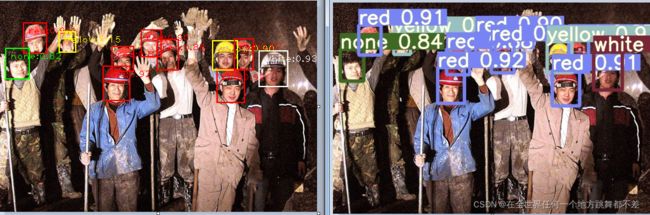
2 .模型存在错判,漏判的情况
(网图)
3.tnn推理结果与yolov5运行detect.py的结果没有完全一致

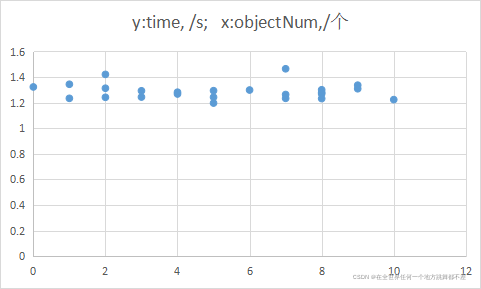
4 .检测时间与图片上的物体数量没有明显的关系