Jetson nano 安装 openpose实现肢体识别,姿态预估
Jetson nano 安装 openpose步骤(全程需连接自带源,请准备工具,内存卡要大于16G,MobaXterm)
一、准备
1、下载原版系统镜像https://developer.nvidia.com/embedded/downloads
2、烧写镜像balenaEtcher到内存卡
3、这个步骤其实很纠结,源修改问题,国内连接速度慢,404,我是先备份原版系统源,修改为清华源,为了安装全局访问连接工具,具体如何安装访问工具请通过搜索引擎搜索
4.先备份原本的source.list文件
sudo cp /etc/apt/sources.list /etc/apt/sources.list.bak
5.修改source
进入source.list
sudo vim /etc/apt/sources.list
复制内容到sources.list
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic main multiverse restricted universe
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-security main multiverse restricted universe
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-updates main multiverse restricted universe
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-backports main multiverse restricted universe
deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic main multiverse restricted universe
deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-security main multiverse restricted universe
deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-updates main multiverse restricted universe
deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-backports main multiverse restricted universe
“Esc”结束输入,“:wq!”保存退出
6.更新软件列表,保存到本地
sudo apt-get update
7-8为安装全局访问工具,具体通过搜索引擎搜索
9.切换回自带的源
mv /etc/apt/sources.list.bak sources.list
10.更新软件列表,保存在本地
sudo apt-get update
11.更新软件
sudo apt-get upgrade
过程漫长
二、检查自带软件是否正常工作
1. 检查CUDA
Jetson-nano原版镜像安装了CUDA10.0版本,如果运行
nvcc -V
不成功,需要你把CUDA的路径写入环境变量
sudo vim ~/.bashrc
在.bashrc文件最后添加
export CUDA_HOME=/usr/local/cuda-10.0
export LD_LIBRARY_PATH=/usr/local/cuda-10.0/lib64:$LD_LIBRARY_PATH
export PATH=/usr/local/cuda-10.0/bin:$PATH
保存退出
重载文件
source ~/.bashrc
source后,此时再执行nvcc -V执行结果如下
zmm@Jetson:~$ nvcc -V
nvcc: NVIDIA (R) Cuda compiler driver
Copyright (c) 2005-2018 NVIDIA Corporation
Built on Sun_Sep_30_21:09:22_CDT_2018
Cuda compilation tools, release 10.0, V10.0.166
zmm@Jetson:~$
2.检查OpenCV
Jetson-nano原版镜像安装OpenCV版本,可以使用命令检查OpenCV是否安装就绪
pkg-config opencv4 --modversion
如果OpenCV安装就绪,会显示版本号,我的版本是4.1.1
3.检查cuDNN
Jetson-nano原版镜像安装cuDNN,并有例子可供运行,我们运行一下例子,也正好验证上面的CUDA
cd /usr/src/cudnn_samples_v7/mnistCUDNN #进入例子目录
sudo make #编译例子
sudo chmod a+x mnistCUDNN # 为可执行文件添加执行权限
./mnistCUDNN # 执行
成功会显示Test passed!
zmm@Jetson:/usr/src/cudnn_samples_v7/mnistCUDNN$ ./mnistCUDNN
/************************************/
Test passed!
三、准备文件
1.前往下面连接下载源代码,需要下载的有openpose,caffe,pybind11,将下载的caffe、pybind11复制到openpose/3rdparty/目录下,目录下存在的这两个名称的空文件夹,更改名称为文件夹下删除之前的名称;
https://github.com/CMU-Perceptual-Computing-Labmputing-Lab
2.前往下面链接下载protobuf2.6;
https://github.com/google/protobuf/releases/download/v2.6.1/protobuf-2.6.1.tar.gz
tar -zxvf protobuf-2.6.1.tar.gz
sudo apt-get install build-essential #安装依赖
cd protobuf-2.6.1/
./configure #配置安装文件
make #编译
make check #检测编译安装环境
sudo make install #安装
检查环境变量是否有protoc
protoc --version
若出现以下报错
protoc: error while loading shared libraries: libprotocbuf.so.9: cannot open shared
创建 bprotobuf.conf文件
sudo chmod 777 -R /etc/ld.so.conf.d
sudo vim /etc/ld.so.conf.d/bprotobuf.conf
#添加的内容
/usr/local/lib
创建好bprotobuf.conf文件后,在 /etc/ld.so.conf.d/目录下输入命令:
sudo ldconfig
检查环境变量是否有protoc
protoc --version
libprotoc 2.6.1
3.cmake-gui安装
jetson nano的原版系统镜像是Ubuntu 18,所以需要cmake>=3.12
#卸载低版本cmake
sudo apt purge cmake-qt-gui
#安装依赖
sudo apt-get install qtbase5-dev
到Cmake官网https://cmake.org/download/下载源代码,解压缩后进入文件夹执行命令
./configure --qt-gui
./bootstrap && make -j4 && sudo make install -j4
-j*为编译线程,视条件确定
执行cmake-gui 会有cmake的桌面版弹窗出现。
四、编译源码
sudo cmake-gui #打开桌面版cmake
mkdir openpose/build #创建build文件夹
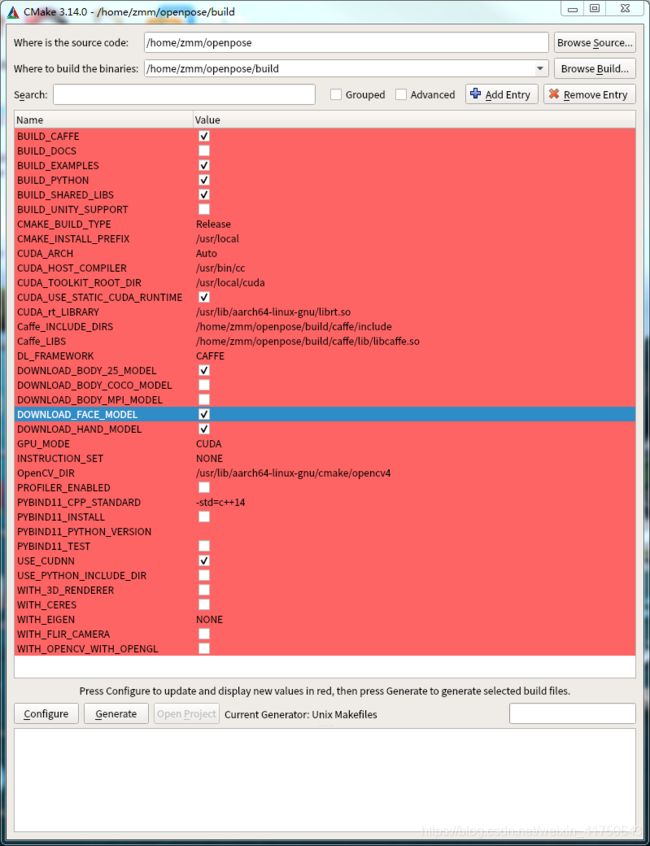
where is the source code :选择openpose源码文件夹
where to build the binaries:选择工程文件文件夹
点击下方Configure,等待配置,下载相关文件,直到Configure Done。会出现一些选项,使用openpose自带caffe需与图片相同。
点击下方Generate,直到Generate Done
编译,等待,没报error,编译成功。
cd openpose/build
sudo make -j4
-j*为编译线程,视条件确定
五、运行
1.使用USB摄像头
#所在目录为openpose
./build/examples/openpose/openpose.bin -camera_resolution 320x160 -net_resolution 64x32
数字部分为16的倍数。
2.使用本地视频
#所在目录为openpose
./build/examples/openpose/openpose.bin --video examples/media/video.avi --net_resolution 64x32
数字部分为16的倍数。
3.使用图片
#所在目录为openpose
./build/examples/openpose/openpose.bin --image_dir examples/media/ --net_resolution 64x32
数字部分为16的倍数。