十二月组队学习之——目标检测Task02:练死劲儿-网络设计
有幸参加了DataWhale举办的目标检测组队学习。收获颇多。
每天记录一些自己之前的知识盲点,需经常温习。
目录
一、锚框 or 先验框
1、关于先验框
二、模型结构
1、VGG16作为backbone
2、分类头和回归头
2.1、边界框的编解码
2.2、分类头与回归头预测
一、锚框 or 先验框
1、关于先验框
在此之前,我们先来捋一捋三个目标检测中常用的“框”:Bounding Box(边界框)、Ground Truth(真值)和Anchor(锚框)。
Bounding Box为一个最为宽泛的概念,从广义上讲凡是边界框都可以认为是Bounding Box。从狭义上讲,Bounding Box特指目标检测算法中所生成的边界框,用于框柱目标物作为预测值;
Ground Truth是人为使用标注工具手动标记出来的矩形框,作为监督学习的真值存在。常用的标注工具有LabelImg、LabelMe等。如图1和图2所示;
Anchor为目标检测算法中人为定义的锚框,又称先验框。说到“先验”二字,会不会联想到机器学习中的贝叶斯算法中的先验概率?事实上二者是有一些相似之处。含有Anchor的目标检测算法如Faster RCNN、SSD和YOLO v2/v3等,利用了预先设定的不同Scale和Ratio的先验框(如Faster RCNN中为9个先验框,YOLO v2为5个先验框,YOLO v3为9个先验框)。与不含有Anchor(RCNN、Fast RCNN和YOLO v1等)直接计算物体中心点坐标(xc, yc)、宽w和高h的算法相比,含有Anchor的目标检测算法可以预测真实的边框相对于Anchor的偏移量,在检测精度上更为准确。由于目标物体的长宽大小各不一样,所以设置了不同尺寸的Anchor,认为所有这些尺寸的Anchor基本上可以满足目标检测的需求。这样就比RCNN中通过Selective Search(选择性搜索)来生成建议区域(Region Proposal)要快很多。

图1 LabelImg示意图

图2 LabelMe示意图
在众多经典的目标检测模型中,均有先验框的说法,有的paper(如Faster RCNN)中称之为anchor(锚点),有的paper(如SSD)称之为prior bounding box(先验框),实际上是一个概念。
那么,为什么要有先验框这个概念呢?按理说我们的图片输入模型,模型给出检测结果就好了,为什么还要有先验框?那么关于它的作用,我们不妨回顾一下前面在2.1节所说的那个目标检测最初的解决方案,我们说,我们要遍历图片上每一个可能的目标框,再对这些框进行分类和微调,就可以完成目标检测任务。
你脑中目前很可能没有清晰的概念,因为这个描述很模糊,本节介绍的先验框就是在解决如何定义哪些位置是候选目标框的问题。
接下来需要介绍3个概念:
- 设置不同尺度的先验框
- 先验框与特征图的对应
- 先验框类别信息的确定
设置不同尺度的先验框
通常,为了覆盖更多可能的情况,在图中的同一个位置,我们会设置几个不同尺度的先验框。这里所说的不同尺度,不单单指大小,还有长宽比,如下面的示意图所示:

图 3 同一位置设置多个不同尺度先验框的可视化
可以看到,通过设置不同的尺度的先验框,就有更高的概率出现对于目标物体有良好匹配度的先验框(体现为高IoU)。
先验框与特征图的对应
除了不同尺度,我们肯定要将先验框铺洒在图片中不同位置上面。
但是遍历原图每个像素,设置的先验框就太多了,完全没必要。如图4所示。一个224x224的图片,假设每个位置设置3个不同尺寸的先验框,那么就有224x224x3=150528个,但是如果我们不去遍历原图,而是去遍历原图下采样得到的feature map呢?以vgg16的backbone为例,下采样了5次,得到7x7的feature map,那就只需要得到7x7x3=147个先验,这样的设置大大减少了先验框的数量,同时也能覆盖大多数情况。

图4 先验框数量对比
因此,我们就将先验框的设置位置与特征图建立一一对应的关系。而且,通过建立这种映射关系,我们可以通过特征图,直接一次性的输出所有先验框的类别信息以及坐标信息,而不是想前面一直描述的那样,每个候选框都去独立的进行一次分类的预测,这样太慢了(阅读后面的章节后,你将会深刻理解这段话的含义,以及建立这种一一映射的重要意义)。
先验框类别信息的确定
我们铺设了很多的先验框,我们先要给出这些先验框的类别信息,才能让模型学着去预测每个先验框是否对应着一个目标物体。
这些先验框中有很多是和图片中我们要检测的目标完全没有交集或者有很小的交集,
我们的做法是,设定一个IoU阈值,例如iou=0.5,与图片中目标的iou<0.5的先验框,这些框我们将其划分为背景,Iou>=0.5的被归到目标先验框,通过这样划分,得到供模型学习的ground truth信息,如图5所示:
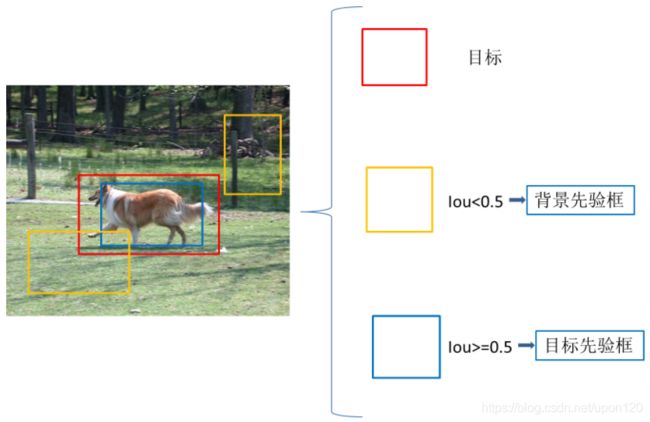
图5 先验框划分
2、先验框的生成
这里,我们来结合代码介绍先验框是如何生成的,更加具体的先验框的使用以及一些训练技巧如先验框的筛选在后面的章节会进一步的介绍。
model.py 脚本下有一个 tiny_detector 类,是本章节介绍的目标检测网络的定义函数,其内部实现了一个 create_prior_boxes 函数,该函数便是用来生成先验框的。
"""
设置细节介绍:
1. 离散程度 fmap_dims = 7: VGG16最后的特征图尺寸为 7*7
2. 在上面的举例中我们是假设了三种尺寸的先验框,然后遍历坐标。在先验框生成过程中,先验框的尺寸是提前设置好的,
本教程为特征图上每一个cell定义了共9种不同大小和形状的候选框(3种尺度*3种长宽比=9)
生成过程:
0. cx, cy表示中心点坐标
1. 遍历特征图上每一个cell,i+0.5是为了从坐标点移动至cell中心,/fmap_dims目的是将坐标在特征图上归一化
2. 这个时候我们已经可以在每个cell上各生成一个框了,但是这个不是我们需要的,我们称之为base_prior_bbox基准框。
3. 根据我们在每个cell上得到的长宽比1:1的基准框,结合我们设置的3种尺度obj_scales和3种长宽比aspect_ratios就得到了每个cell的9个先验框。
4. 最终结果保存在prior_boxes中并返回。
需要注意的是,这个时候我们的到的先验框是针对特征图的尺寸并归一化的,因此要映射到原图计算IOU或者展示,需要:
img_prior_boxes = prior_boxes * 图像尺寸
"""
def create_prior_boxes():
"""
Create the 441 prior (default) boxes for the network, as described in the tutorial.
VGG16最后的特征图尺寸为 7*7
我们为特征图上每一个cell定义了共9种不同大小和形状的候选框(3种尺度*3种长宽比=9)
因此总的候选框个数 = 7 * 7 * 9 = 441
:return: prior boxes in center-size coordinates, a tensor of dimensions (441, 4)
"""
fmap_dims = 7
obj_scales = [0.2, 0.4, 0.6]
aspect_ratios = [1., 2., 0.5]
prior_boxes = []
for i in range(fmap_dims):
for j in range(fmap_dims):
cx = (j + 0.5) / fmap_dims
cy = (i + 0.5) / fmap_dims
for obj_scale in obj_scales:
for ratio in aspect_ratios:
prior_boxes.append([cx, cy, obj_scale * sqrt(ratio), obj_scale / sqrt(ratio)])
prior_boxes = torch.FloatTensor(prior_boxes).to(device) # (441, 4)
prior_boxes.clamp_(0, 1) # (441, 4)
return prior_boxes根据上面的代码,我们得到了先验框,那么接下来进行一下可视化吧,为了便于观看,仅展示特征图中间那个cell对应的先验框。
这里为了对比,我们设置两组obj_scales尺度参数。
1.obj_scales = [0.1, 0.2, 0.3]
这里的参数是归一化的,0.1代表anchor的基准大小为原图长/宽的0.1那么大。

图6 obj_scales = [0.1, 0.2, 0.3]的先验框可视化
可以看到,我们在图片中心得到了各个尺度和宽高比的先验框。
2.obj_scales = [0.2, 0.4, 0.6]

图7 obj_scales = [0.2, 0.4, 0.6]的先验框可视化
这里对比两组不同的尺度设置,是想展示一个需要注意的小问题,那就是越界,可以看到第二组可视化部分蓝色和绿色的先验框都超出图片界限了,这种情况其实是非常容易出现的,越靠近四周的位置的先验框越容易越界,那么这个问题怎么处理呢?这里我们一般用图片尺寸将越界的先验框进行截断,比如某个先验框左上角坐标是(-5, -9),那么就截断为(0,0),某个先验框右下角坐标是(324,134),当我们的图片大小为(224,224)时,就将其截断为(224,134)。
对应于代码中是这行,prior_boxes.clamp_(0, 1),由于进行了归一化,所以使用0-1进行截断。
二、模型结构
本章教程所介绍的网络,后面我们称其为Tiny_Detector,是为了本教程特意设计的网络,而并不是某个经典的目标检测网络。如果一定要溯源的话,由于代码是由一个外国的开源SSD教程改编而来,因此很多细节上也更接近SSD网络,可以认为是一个简化后的版本,目的是帮助大家更好的入门。
那么下面,我们就开始介绍Tiny_Detector的模型结构。
1、VGG16作为backbone
先来说下backbone是个啥子玩意儿。
目标检测算法,无论是一阶段还是二阶段,都可以大致上分为input、backbone、neck和head四个部分。之前说过,人工智能在计算机视觉中的应用流程可以概括为feature extraction + classification(or other algorithms)。这里的backbone,就是卷积神经网络(CNN),其主要作用主要就是进行特征提取(feature extraction)。所以,backbone选的好坏对于整个目标检测算法最终的性能至关重要。
何为VGG16?先说下VGG吧。VGG是牛津大学Visual Geometry Group的简称,其团队发明的VGGNet是2014年ILSVRC竞赛分类任务的第二名,定位任务的第一名。VGGNet有众多版本,其中最常用的为VGG16和VGG19。详见图8所示。

图8 VGG的几个不同版本
注意,VGG16这里的16特指(卷积层+全连接层),池化层、激活层和Dropout层不算在内。
VGGNet具有较好的性能,是很多目标检测算法常用的backbone之一。
为了使结构简单易懂,我们使用VGG16作为backbone,即完全采用vgg16的结构作为特征提取模块,只是去掉fc6和fc7两个全连接层,即可以当做我们自定义的VGG14。如图9所示:

图9 Tiny Detector的backbone
对于网络的输入尺寸的确定,由于vgg16的ImageNet预训练模型是使用224x224尺寸训练的,因此我们的网络输入也固定为224x224,和预训练模型尺度保持一致可以更好的发挥其作用。通常来说,这样的网络输入大小,对于检测网络来说还是偏小,在完整的进行完本章的学习后,不妨尝试下将输入尺度扩大,看看会不会带来更好的效果。
特征提取模块对应代码模块在model.py中的VGGBase类进行了定义:
class VGGBase(nn.Module):
"""
VGG base convolutions to produce feature maps.
完全采用vgg16的结构作为特征提取模块,丢掉fc6和fc7两个全连接层。
因为vgg16的ImageNet预训练模型是使用224×224尺寸训练的,因此我们的网络输入也固定为224×224
"""
def __init__(self):
super(VGGBase, self).__init__()
# Standard convolutional layers in VGG16
self.conv1_1 = nn.Conv2d(3, 64, kernel_size=3, padding=1) # stride = 1, by default
self.conv1_2 = nn.Conv2d(64, 64, kernel_size=3, padding=1)
self.pool1 = nn.MaxPool2d(kernel_size=2, stride=2) # 224->112
self.conv2_1 = nn.Conv2d(64, 128, kernel_size=3, padding=1)
self.conv2_2 = nn.Conv2d(128, 128, kernel_size=3, padding=1)
self.pool2 = nn.MaxPool2d(kernel_size=2, stride=2) # 112->56
self.conv3_1 = nn.Conv2d(128, 256, kernel_size=3, padding=1)
self.conv3_2 = nn.Conv2d(256, 256, kernel_size=3, padding=1)
self.conv3_3 = nn.Conv2d(256, 256, kernel_size=3, padding=1)
self.pool3 = nn.MaxPool2d(kernel_size=2, stride=2) # 56->28
self.conv4_1 = nn.Conv2d(256, 512, kernel_size=3, padding=1)
self.conv4_2 = nn.Conv2d(512, 512, kernel_size=3, padding=1)
self.conv4_3 = nn.Conv2d(512, 512, kernel_size=3, padding=1)
self.pool4 = nn.MaxPool2d(kernel_size=2, stride=2) # 28->14
self.conv5_1 = nn.Conv2d(512, 512, kernel_size=3, padding=1)
self.conv5_2 = nn.Conv2d(512, 512, kernel_size=3, padding=1)
self.conv5_3 = nn.Conv2d(512, 512, kernel_size=3, padding=1)
self.pool5 = nn.MaxPool2d(kernel_size=2, stride=2) # 14->7
# Load pretrained weights on ImageNet
self.load_pretrained_layers()
def forward(self, image):
"""
Forward propagation.
:param image: images, a tensor of dimensions (N, 3, 224, 224)
:return: feature maps pool5
"""
out = F.relu(self.conv1_1(image)) # (N, 64, 224, 224)
out = F.relu(self.conv1_2(out)) # (N, 64, 224, 224)
out = self.pool1(out) # (N, 64, 112, 112)
out = F.relu(self.conv2_1(out)) # (N, 128, 112, 112)
out = F.relu(self.conv2_2(out)) # (N, 128, 112, 112)
out = self.pool2(out) # (N, 128, 56, 56)
out = F.relu(self.conv3_1(out)) # (N, 256, 56, 56)
out = F.relu(self.conv3_2(out)) # (N, 256, 56, 56)
out = F.relu(self.conv3_3(out)) # (N, 256, 56, 56)
out = self.pool3(out) # (N, 256, 28, 28)
out = F.relu(self.conv4_1(out)) # (N, 512, 28, 28)
out = F.relu(self.conv4_2(out)) # (N, 512, 28, 28)
out = F.relu(self.conv4_3(out)) # (N, 512, 28, 28)
out = self.pool4(out) # (N, 512, 14, 14)
out = F.relu(self.conv5_1(out)) # (N, 512, 14, 14)
out = F.relu(self.conv5_2(out)) # (N, 512, 14, 14)
out = F.relu(self.conv5_3(out)) # (N, 512, 14, 14)
out = self.pool5(out) # (N, 512, 7, 7)
# return 7*7 feature map
return out
def load_pretrained_layers(self):
"""
we use a VGG-16 pretrained on the ImageNet task as the base network.
There's one available in PyTorch, see https://pytorch.org/docs/stable/torchvision/models.html#torchvision.models.vgg16
We copy these parameters into our network. It's straightforward for conv1 to conv5.
"""
# Current state of base
state_dict = self.state_dict()
param_names = list(state_dict.keys())
# Pretrained VGG base
pretrained_state_dict = torchvision.models.vgg16(pretrained=True).state_dict()
pretrained_param_names = list(pretrained_state_dict.keys())
# Transfer conv. parameters from pretrained model to current model
for i, param in enumerate(param_names):
state_dict[param] = pretrained_state_dict[pretrained_param_names[i]]
self.load_state_dict(state_dict)
print("\nLoaded base model.\n") 因此,我们的Tiny_Detector特征提取层输出的是7x7的feature map,下面我们要在feature_map上设置对应的先验框,或者说anchor。
关于先验框的概念,上节已经做了介绍,在本实验中,anchor的配置如下:
- 将原图均匀分成7x7个cell
- 设置3种不同的尺度:0.2, 0.4, 0.6
- 设置3种不同的长宽比:1:1, 1:2, 2:1
因此,我们对这 7x7 的 feature map 设置了对应的7x7x9个anchor框,其中每一个cell有9个anchor框,如图10所示:

图10 (a)原图,(b)中的9种颜色框代表的是9个anchor框
对于每个anchor,我们需要预测两类信息,一个是这个anchor的类别信息,一个是物体的边界框信息。如图11所示。
在我们的实验中,类别信息由21类别的得分组成(VOC数据集的20个类别 + 一个背景类),模型最终会选择预测得分最高的类作为边界框对象的类别。
而边界框信息是指,我们大致知道了当前anchor中包含一个物体的情况下,如何对anchor进行微调,使得最终能够准确预测出物体的bbox。
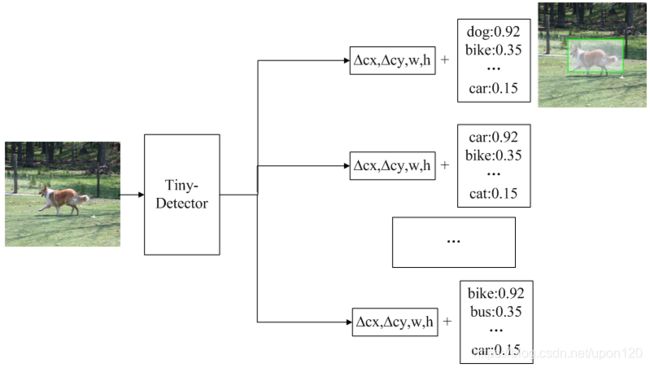
图11 Tiny-Detector的输出示例
这两种预测我们分别成为分类头和回归头,那么分类头预测和回归头预测是怎么得到的?
其实我们只需在7x7的feature map后,接上两个3x3的卷积层,即可分别完成分类和回归的预测。
下面我们就对分类头和回归头的更多细节进行介绍。
2、分类头和回归头
2.1、边界框的编解码
Tiny_Detector并不是直接预测目标框,而是回归对于anchor要进行多大程度的调整,才能更准确的预测出边界框的位置。那么我们的目标就是需要找一种方法来量化计算这个偏差。
对于一只狗的目标边界框和先验框的示例如下图12所示:

图12 目标框和预测框示例
我们的模型要预测anchor与目标框的偏移,并且这个偏移会进行某种形式的归一化,这个过程我们称为边界框的编码。
这里我们使用的是与SSD完全一致的编码方法,具体公示表达如下:

图13 编码公式
模型预测并输出的是这个编码后的偏移量(gcx, gcy, gw, gh),最终只要再依照公式反向进行解码,就可以得到预测的目标框的信息。
目标框编码与解码的实现位于utils.py中,代码如下:
def cxcy_to_gcxgcy(cxcy, priors_cxcy):
"""
Encode bounding boxes (that are in center-size form) w.r.t. the corresponding prior boxes (that are in center-size form).
For the center coordinates, find the offset with respect to the prior box, and scale by the size of the prior box.
For the size coordinates, scale by the size of the prior box, and convert to the log-space.
In the model, we are predicting bounding box coordinates in this encoded form.
:param cxcy: bounding boxes in center-size coordinates, a tensor of size (n_priors, 4)
:param priors_cxcy: prior boxes with respect to which the encoding must be performed, a tensor of size (n_priors, 4)
:return: encoded bounding boxes, a tensor of size (n_priors, 4)
"""
# The 10 and 5 below are referred to as 'variances' in the original SSD Caffe repo, completely empirical
# They are for some sort of numerical conditioning, for 'scaling the localization gradient'
# See https://github.com/weiliu89/caffe/issues/155
return torch.cat([(cxcy[:, :2] - priors_cxcy[:, :2]) / (priors_cxcy[:, 2:] / 10), # g_c_x, g_c_y
torch.log(cxcy[:, 2:] / priors_cxcy[:, 2:]) * 5], 1) # g_w, g_h
def gcxgcy_to_cxcy(gcxgcy, priors_cxcy):
"""
Decode bounding box coordinates predicted by the model, since they are encoded in the form mentioned above.
They are decoded into center-size coordinates.
This is the inverse of the function above.
:param gcxgcy: encoded bounding boxes, i.e. output of the model, a tensor of size (n_priors, 4)
:param priors_cxcy: prior boxes with respect to which the encoding is defined, a tensor of size (n_priors, 4)
:return: decoded bounding boxes in center-size form, a tensor of size (n_priors, 4)
"""
return torch.cat([gcxgcy[:, :2] * priors_cxcy[:, 2:] / 10 + priors_cxcy[:, :2], # c_x, c_y
torch.exp(gcxgcy[:, 2:] / 5) * priors_cxcy[:, 2:]], 1) # w, h2.2、分类头与回归头预测
按照前面的介绍,对于输出7x7的feature map上的每个先验框我们想预测:
1)边界框的一组21类分数,其中包括VOC的20类和一个背景类。
2)边界框编码后的偏移量(gcx, gcy, gw, gh)。
为了得到我们想预测的类别和偏移量,我们需要在feature map后分别接上两个卷积层:
1)一个分类预测的卷积层采用3x3卷积核padding和stride都为1,每个anchor需要分配21个卷积核,每个位置有9个anchor,因此需要21x9个卷积核。
2)一个定位预测卷积层,每个位置使用3x3卷积核padding和stride都为1,每个anchor需要分配4个卷积核,因此需要4x9个卷积核。
我们直观的看看这些卷积上的输出,见下图14:

图14 Tiny-Detector输出示例
这个回归头和分类头的输出分别用蓝色和黄色表示。其feature map的大小7x7保持不变。我们真正关心的是第三维度通道数,把其具体的展开可以看到如下图15所示:

图15 每个cell中9个anchor预测编码偏移量
也就是说,最终回归头的输出有36个通道,其中每4个值就对应了一个anchor的编码后偏移量的预测,这样的4个值的预测共有9组,因此通道数是36。
分类头可以用同样的方式理解,如下图16所示:
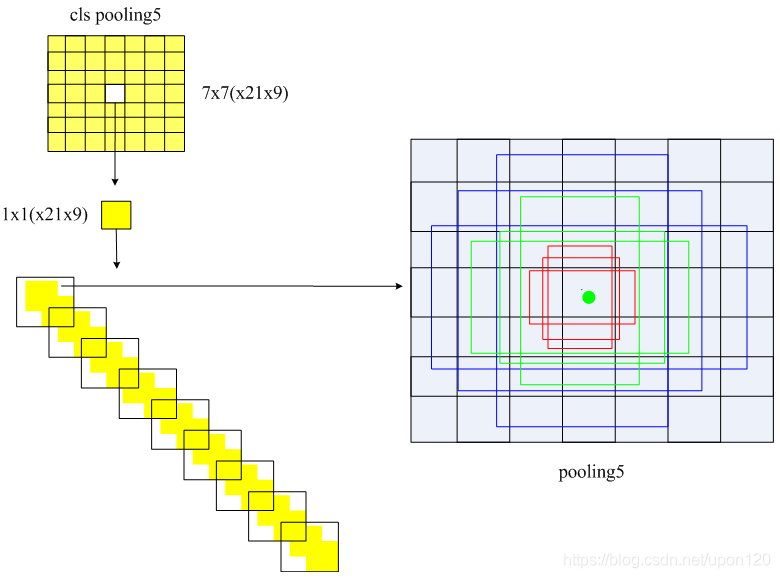
图16 每个cell中9个anchor预测分类得分
分类头和回归头结构的定义,由 model.py 中的 PredictionConvolutions 类实现,代码如下:
class PredictionConvolutions(nn.Module):
"""
Convolutions to predict class scores and bounding boxes using feature maps.
The bounding boxes (locations) are predicted as encoded offsets w.r.t each of the 441 prior (default) boxes.
See 'cxcy_to_gcxgcy' in utils.py for the encoding definition.
这里预测坐标的编码方式完全遵循的SSD的定义
The class scores represent the scores of each object class in each of the 441 bounding boxes located.
A high score for 'background' = no object.
"""
def __init__(self, n_classes):
"""
:param n_classes: number of different types of objects
"""
super(PredictionConvolutions, self).__init__()
self.n_classes = n_classes
# Number of prior-boxes we are considering per position in the feature map
# 9 prior-boxes implies we use 9 different aspect ratios, etc.
n_boxes = 9
# Localization prediction convolutions (predict offsets w.r.t prior-boxes)
self.loc_conv = nn.Conv2d(512, n_boxes * 4, kernel_size=3, padding=1)
# Class prediction convolutions (predict classes in localization boxes)
self.cl_conv = nn.Conv2d(512, n_boxes * n_classes, kernel_size=3, padding=1)
# Initialize convolutions' parameters
self.init_conv2d()
def init_conv2d(self):
"""
Initialize convolution parameters.
"""
for c in self.children():
if isinstance(c, nn.Conv2d):
nn.init.xavier_uniform_(c.weight)
nn.init.constant_(c.bias, 0.)
def forward(self, pool5_feats):
"""
Forward propagation.
:param pool5_feats: conv4_3 feature map, a tensor of dimensions (N, 512, 7, 7)
:return: 441 locations and class scores (i.e. w.r.t each prior box) for each image
"""
batch_size = pool5_feats.size(0)
# Predict localization boxes' bounds (as offsets w.r.t prior-boxes)
l_conv = self.loc_conv(pool5_feats) # (N, n_boxes * 4, 7, 7)
l_conv = l_conv.permute(0, 2, 3, 1).contiguous()
# (N, 7, 7, n_boxes * 4), to match prior-box order (after .view())
# (.contiguous() ensures it is stored in a contiguous chunk of memory, needed for .view() below)
locs = l_conv.view(batch_size, -1, 4) # (N, 441, 4), there are a total 441 boxes on this feature map
# Predict classes in localization boxes
c_conv = self.cl_conv(pool5_feats) # (N, n_boxes * n_classes, 7, 7)
c_conv = c_conv.permute(0, 2, 3, 1).contiguous() # (N, 7, 7, n_boxes * n_classes), to match prior-box order (after .view())
classes_scores = c_conv.view(batch_size, -1, self.n_classes) # (N, 441, n_classes), there are a total 441 boxes on this feature map
return locs, classes_scores按照上面的介绍,我们的模型输出的shape应该为:
- 分类头 batch_size x 7 x 7 x 189
- 回归头 batch_size x 7 x 7 x 36
但是为了方便后面的处理,我们肯定更希望每个anchor的预测独自成一维,也就是:
- 分类头 batch_size x 441 x 21
- 回归头 batch_size x 441 x 4
441是因为我们的模型定义了总共441=7x7x9个先验框,这个转换对应了这两行代码:
locs = l_conv.view(batch_size, -1, 4)
classes_scores = c_conv.view(batch_size, -1, self.n_classes)
这个过程的可视化如图17所示。

图17 pool5层输出分类和回归结果
学习真快乐啊~