基于SLAM的无人机LiDAR观察演进的沿海沙丘地貌变化
沙丘管理被认为是主要的沿海管理工具,虽然先前捕获精细尺度特征的监测工作需要在相对有限的空间尺度上进行费力的实地调查,但过去二十年在描述和量化影响沿海海滩和河口系统的动态过程方面取得了显着进展。随着机载LiDAR成本的下降,使用量有所增加。无人机LiDAR不仅限于DSM的开发,而是能够“穿透”沙丘植被以开发精确的DTM,并促进相对于推动地貌变化的局部过程更直接地测量沙丘结构。传统的点云方法适用于监测海滩地形的变化,这里将介绍一种在昆士兰州布里比岛北部沿海沙丘的现有井喷特征上部署无人机LiDAR的新方法。
布里比岛是澳大利亚昆士兰州摩顿湾海洋公园最北端和最小的主要沙岛(图1(A)),是国际公认的拉姆萨尔湿地和迁徙水鸟栖息地的一部分。布里比岛(图1(B))位于澳大利亚东部布里斯班以北约70公里处,通过浮石通道与大陆隔开,其特征是潮间带红树林和盐沼栖息地,而沿珊瑚海(西南太平洋)的34公里西部海岸线由沙滩和沿海沙丘形成。

图1 研究区域(A)位于澳大利亚昆士兰太平洋海岸,沿(B)布里比岛北部海滩。(C) 研究区域插图(MGA投影,GDA 94基准)
研究区(南纬26°50.5′,东经153°7.7′)对应于布里比岛北部的一段沿海沙丘,其中冲刷过程破坏了沙丘结构和前沙丘植被,现有的井喷和过冲扇形成证明了这一点(图1(C)和图2)。随着监测重点的增加,该位置是评估无人机激光雷达等微尺度新监测技术效用的理想测试平台。

图2 研究区域的北面地面视角以井喷和过冲扇形成为中心,将布里比岛北部相对狭窄的部分一分为二
鉴于布里比岛上的沿海沙丘是一个动态环境,在这项研究期间建立固定地面控制点(GCP)是不切实际的。因此,在每次扫描事件之前,都会在整个研究区域中放置六个(7.5 cm)激光配准目标。徕卡 Viva GS16 GNSS “智能天线”,带CS20 控制器与Geoconnect SmartnetAUS RTK网络的连接结合使用,以对MGA投影中的每个目标进行地理配准,GDA 94基准面与<20-mm 3D解决方案(图3)。

图3 a激光配准目标和b徕卡GS16 GNSS天线的示例图像
所有飞行均使用大疆“经纬M600 Pro”无人机平台进行,能够在20到25分钟之间使用Hovermap飞行时间。作为一个独立的单元,Hovermap很容易集成到任何合适的无人机平台上,并在这项研究中使用简单的防振支架固定在M600上,以尽量减少高频振动的潜在影响(图4)。

图4 安装在DJIM600无人机平台上的a气垫图激光雷达b在研究区域起飞后不久
每次飞行都是使用研究区域的地理参考Esri世界影像航拍照片和全球制图仪软件进行规划的。为了最大限度地提高点云密度和冠层“穿透力”,使用网格工具以20 m的间隔绘制飞行线以创建“交叉飞行”模式(图 5)。

图5(a)在Global Mapper(MGA Projection,GDA 94 Datum中进行自主“交叉飞行”计划的屏幕截图(b)在机库自动驾驶软件中加载的相应航迹规划
随后对点云进行过滤和裁剪,如图6所示。记录每次飞行的描述性统计数据,包括高度(m),速度(m·s−1)和面积(m2)以及由此产生的点云密度(pts.·m−2)、地面采样距离(GSD、m)和“采样工作量变量”(SEV、s·m−2).

图6 航迹1的示例输出说明(a)原始点云和(b)使用所述Python脚本进行后处理后保留的点
在这里,使用55°的坡度设置“局部陡坡”策略创建DTM,并使用从Hovermap点云的观测平均GSD得出的平均点距离0.020 m进行优化(图7)。

图7 使用航迹2中的Hovermap点云数据创建网格示例,说明(a)原始点云,(b)分类为“地面”的点,以及(c)生成的网格对象(DTM)
网格模型之间的体积差异令人感兴趣,因此还沿z轴使用3DR的容积函数来量化每个航迹间隔内去除和/或沉积(即参考表面以下/上方)的沙子的近似体积(图8)。
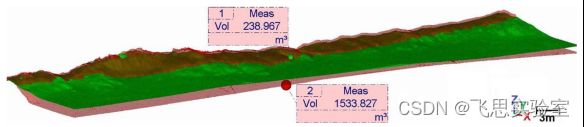
图8 航迹3(绿色)和航迹4(红色)之间观察到的体积差异的体积分析输出示例
在这里,航迹3-HM(图9a)和航迹4-HM(图9b)网格之间的变化清晰可见,包括微尺度楔块失效等细节。网格数据的这些观测结果得到了调查沙丘的照片的支持(图9c,d)。
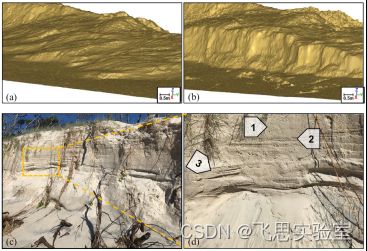
图9(a)航迹3 HM和(b)航迹4 HM的相同路段时,在间隔3期间,风暴波对前沙丘的下切和陡坎示例。航迹4期间拍摄的这部分前沙丘的照片显示了(c)微尺度后陡坎楔形破坏和根茎破坏/暴露,以及(d)早期沙丘层理特征
与在整个分析区域观察到的情况类似,在现有井喷处也观察到时间变化。如图10所示,在大多数研究中都检测到相对较小的高程和坡度变化,但航迹4-HM除外,其中前沙丘的疤痕和海滩的下降很明显(图10d)。
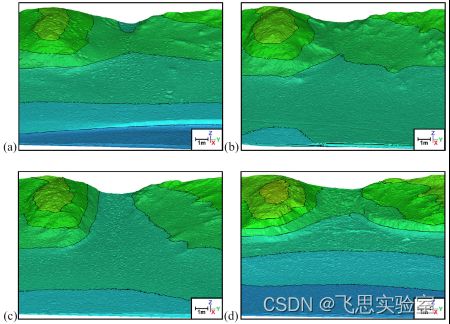
图10 地形变化,在(a)航迹1-HM、(b)航迹2-HM、(c)航迹3-HM和(d)航迹4-HM(0.5米等值线间隔)中观察到的现有井喷处的海拔
无人机LiDAR是一种强大的工具,在目前可用的各种方法中作为新工具具有很大的前景。我们相信,这里描述的评估方法可以应用于其他无人机LiDAR系统,为未来的沿海地貌研究选择仪器时提供成本/效益决策。
源自:Remote Sensing in Earth Systems Sciences (2019) 2:273–291 https://doi.org/10.1007/s41976-019-00021-x