OpenCV学习—基于OpenCV的区域分割、轮廓检测和阈值处理(python)
文章来源基于OpenCV的区域分割、轮廓检测和阈值处理
介绍
OpenCV是一个用于图像处理、分析、机器视觉方面的开源函数库。该库的所有代码都经过优化,计算效率很高,因为,它更专注于设计成为一种用于实时系统的开源库。opencv采用C语言进行优化,而且,在多核机器上面,其运行速度会更快。它的一个目标是提供友好的机器视觉接口函数,从而使得复杂的机器视觉产品可以加速面世。该库包含了横跨工业产品检测、医学图像处理、安防、用户界面、摄像头标定、三维成像、机器视觉等领域的超过500个接口函数。同时,由于计算机视觉与机器学习密不可分,该库也包含了比较常用的一些机器学习算法。或许,很多人知道,图像识别、机器视觉在安防领域有所应用。但,很少有人知道,在航拍图片、街道图片(例如google street view)中,要严重依赖于机器视觉的摄像头标定、图像融合等技术。
近年来,在入侵检测、特定目标跟踪、目标检测、人脸检测、人脸识别、人脸跟踪等领域,opencv可谓大显身手,而这些,仅仅是其应用的冰山一角。
假设我们需要从输入帧中检测到一个目标。我们可以在框架中 定义一个子区域作为整个检测区域,一般有下面三个步骤:
- 定义感兴趣的区域
- 在ROI区域中检测轮廓
- 阈值检测轮廓轮廓线
ROI定义
我们感兴趣的对象所在的帧内的子区域称为感兴趣区域(ROI)。
在输入整个帧中定义ROI的过程称为ROI分割。
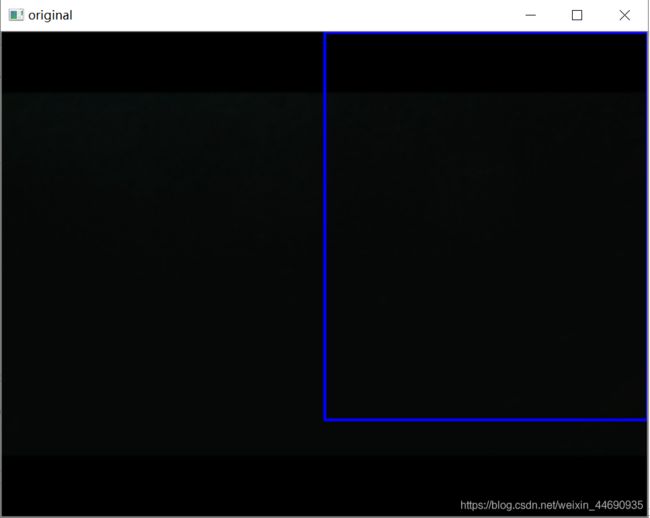
图1 ROI区域
我们选择框架中的特定区域,并以矩形方法提供其尺寸,以便它将在框架上绘制矩形的ROI,如图1所示。
轮廓定义:轮廓表示用来限制对象形状的轮廓。
在将ROI框架设为阈值后,找到轮廓效果最佳。
阈值定义::阈值分割时图像分割的一种简单形式,这是将RGB图像或者灰度图像转化为二进制图像的过程。
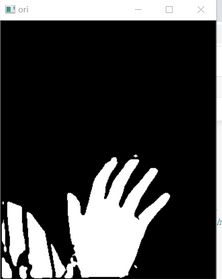
图2二进制阈值图像
通过对RGB图像进行阈值处理,程序较容易找到轮廓,因为由于ROI中感兴趣对象的颜色将成为黑色或者白色,因此图像分割可以较容易实现 。
对框架进行阈值处理并检测到轮廓之后,我们应用凸包技术对围绕对象点的紧密拟合凸边界进行设置。如图3所示。

图3凸包技术检测的图像
可以遮盖ROI以仅显示被检测到的轮廓本身覆盖的目标。
Mask定义
首先我们从物理的角度来看看mask到底是什么过程。
在半导体制造中,许多芯片工艺步骤采用光刻技术,用于这些步骤的图形“底片”称为掩膜(也称作“掩模”),其作用是:在硅片上选定的区域中对一个不透明的图形模板遮盖,继而下面的腐蚀或扩散将只影响选定的区域以外的区域。
图像掩膜与其类似,用选定的图像、图形或物体,对处理的图像(全部或局部)进行遮挡,来控制图像处理的区域或处理过程。

因此,基本上在这里我们将掩盖ROI的背景。为此,首先我们将修复ROI的背景。然后,在固定背景之后,我们将从框架中减去背景,并用wewant背景(这里是一个简单的黑色框架)替换它。
mask的结果如图4所示

图4 Mask图像
code:
Code运行:通过python运行,选择合适的背景条件,按b键,电脑相机开始捕捉目标,进行拟合,按r键获取当前的目标可以保存图像。
import cv2
import numpy as np
import copy
import math
x=0.5 # start point/total width
y=0.8 # start point/total width
threshold = 60 # BINARY threshold
blurValue = 7 # GaussianBlur parameter
bgSubThreshold = 50
learningRate = 0
# variables
isBgCaptured = 0 # whether the background captured
def removeBG(frame): #Subtracting the background
fgmask = bgModel.apply(frame,learningRate=learningRate)
kernel = np.ones((3, 3), np.uint8)
fgmask = cv2.erode(fgmask, kernel, iterations=1)
res = cv2.bitwise_and(frame, frame, mask=fgmask)
return res
# Camera
camera = cv2.VideoCapture(0)
camera.set(10,200)
while camera.isOpened():
ret, frame = camera.read()
frame = cv2.bilateralFilter(frame, 5, 50, 100) # smoothening filter
frame = cv2.flip(frame, 1) # flip the frame horizontally
cv2.rectangle(frame, (int(x * frame.shape[1]), 0),
(frame.shape[1], int(y * frame.shape[0])), (255, 0, 0), 2) #drawing ROI
cv2.imshow('original', frame)
# Main operation
if isBgCaptured == 1: # this part wont run until background captured
img = removeBG(frame)
img = img[0:int(y * frame.shape[0]),
int(x * frame.shape[1]):frame.shape[1]] # clip the ROI
cv2.imshow('mask', img)
# convert the image into binary image
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
blur = cv2.GaussianBlur(gray, (blurValue, blurValue), 0)
cv2.imshow('blur', blur)
ret, thresh = cv2.threshold(blur, threshold, 255, cv2.THRESH_BINARY) #thresholding the frame
cv2.imshow('ori', thresh)
# get the coutours
thresh1 = copy.deepcopy(thresh)
contours, hierarchy = cv2.findContours(thresh1, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE) #detecting contours
length = len(contours)
maxArea = -1
if length > 0:
for i in range(length): # find the biggest contour (according to area)
temp = contours[i]
area = cv2.contourArea(temp)
if area > maxArea:
maxArea = area
ci = i
res = contours[ci]
hull = cv2.convexHull(res) #applying convex hull technique
drawing = np.zeros(img.shape, np.uint8)
cv2.drawContours(drawing, [res], 0, (0, 255, 0), 2) #drawing contours
cv2.drawContours(drawing, [hull], 0, (0, 0, 255), 3) #drawing convex hull
cv2.imshow('output', drawing)
# Keyboard OP
k = cv2.waitKey(10)
if k == 27:
camera.release()
cv2.destroyAllWindows()
break
elif k == ord('b'): # press 'b' to capture the background
bgModel = cv2.createBackgroundSubtractorMOG2(0, bgSubThreshold)
isBgCaptured = 1
print( 'Background Captured')
elif k == ord('r'): # press 'r' to reset the background
bgModel = None
isBgCaptured = 0
print ('Reset BackGround')
自己尝试的结果:
