ROS Noetic入门笔记(一)在ubuntu20.04中安装ROS Noetic并简单测试
ROS Noetic入门笔记(一)在ubuntu20.04中安装ROS Noetic并简单测试
ROS Noetic入门笔记(二)ROS Noetic创建工作空间和功能包
ROS Noetic入门笔记(三)ROS Noetic中的常用命令及工具
ROS Noetic入门笔记(四)使用rqt_console和roslaunch
ROS Noetic入门笔记(五)创建ROS话题消息(msg)和服务数据(srv
ROS Noetic入门笔记(六)使用C++编写简单的Publisher与Suscriber
ROS Noetic入门笔记(七)使用Python编写简单的Publisher与Suscriber
ROS Noetic入门笔记(八)运行Publisher与Suscriber
ROS Noetic入门笔记(九)使用C++编写简单的Server与Client
ROS Noetic入门笔记(十)使用Python编写简单的Server与Client
ROS Noetic入门笔记(十一)使用rosbag实现数据记录与回放
前提
已安装ubuntu20.04系统,这里我是在win10的基础上安装的ubuntu双系统,使用虚拟机也是可以的。
参考
官方教程链接:wiki.ros.org
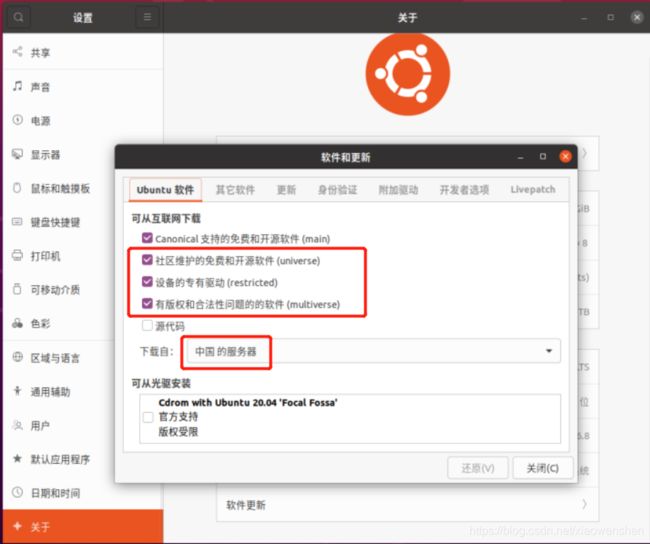
1.配置系统软件源
桌面上点击右键-设置-关于-软件更新
勾选universe,restricted,multiverse这三项,系统安装好后这三项应该是默认勾选的,服务器默认选择中国的服务器即可,如果是在国外的小伙伴或者有代理可用也可以选择ubuntu官方的服务器可以避免后边一系列的错误。
2.添加ROS软件源
打开终端,输入以下命令添加ROS官方软件源镜像:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'

3.添加密钥
官方教程中是使用curl下载官方ROS密钥并添加到本地,但由于网络问题应该会失败,可以尝试使用手机热点但不一定会成功,我这里使用手机热点失败了,国外的小伙伴或者有代理可用的可以尽量参照官方教程来。
首先在终端中输入如下命令安装curl,如果你之前没装过的话:
sudo apt install curl
然后输入以下命令下载官方ROS密钥并添加到本地:
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -
由于网络问题,参照官方教程添加密钥失败的可以使用以下命令添加密钥:
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654

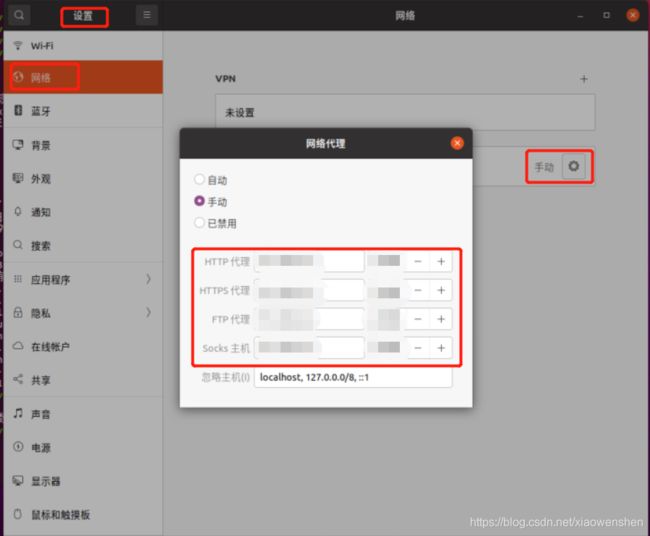
如果需要使用代理在设置-网络-网络代理-手动 设置

4.安装ROS Noetic桌面完整版
输入以下命令确保package索引是最新的
sudo apt update
安装桌面完整版,推荐的安装版本,功能比较全
sudo apt install ros-noetic-desktop-full
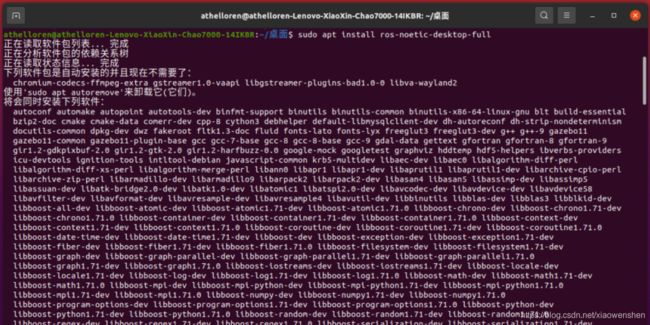
我这里在安装的时候下载失败了,不用理他
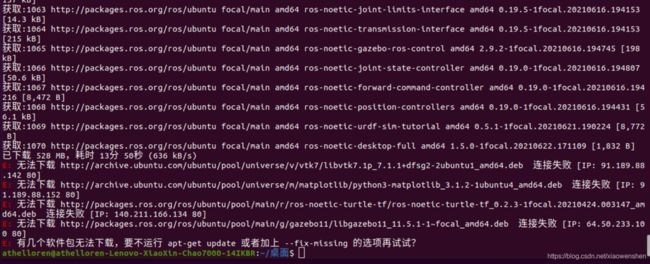
换个网络,重新输入sudo apt install ros-noetic-desktop-full继续安装即可,可见刚才没下载成功的会自动下载
安装过程耗时比较长,请耐心等待,安装完成如下图:
5.设置环境变量
Ubuntu默认使用的终端是bash,在终端中输入如下命令设置ROS环境变量:
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
![]()
6.安装rosinstall工具和其他用于构建 ROS 包的依赖项
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential

输入y继续安装,安装完成如下图
7.初始化rosdep
sudo rosdep init
rosdep update
这里我执行sudo rosdep init时失败了,提示cannot download default sources list from:https://raw.githubusercontent.com…20-default.list website may be down.

设置了网络代理仍然失败
采用了如下办法:
sudo gedit /etc/hosts
添加如下:
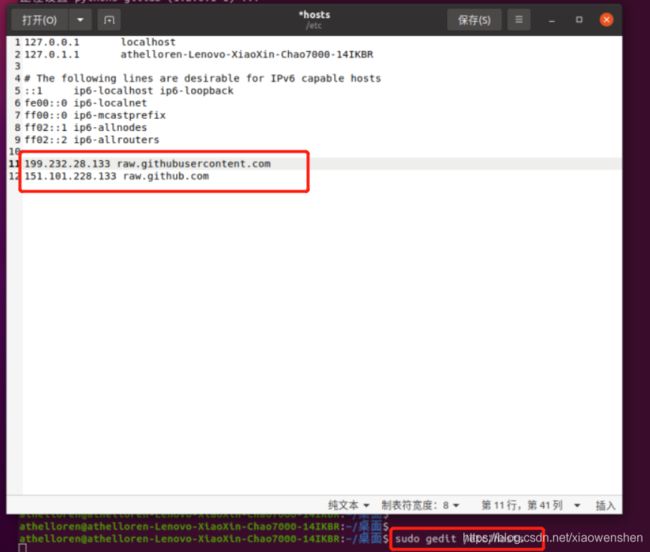
保存后重试成功

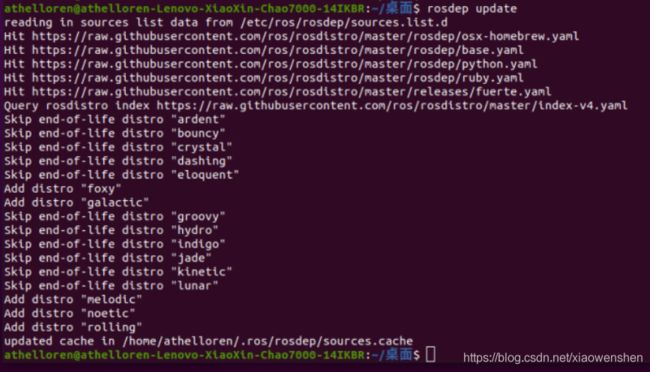
这步比较容易成功,但是接下来执行rosdep update也多会失败,基本上都是由于网络问题造成的,我试了使用手机热点还有网络上提供的一些其他办法仍然失败,后来使用了代理,执行rosdep update一次性成功,如下图:
至此,在ubuntu20.04上安装ROS Noetic已经完成,接下来跑个小乌龟试一下是否安装成功了。
8.运行小海龟看是否安装成功了
打开终端输入roscore命令可以看到ROS已经可以运行起来了
roscore
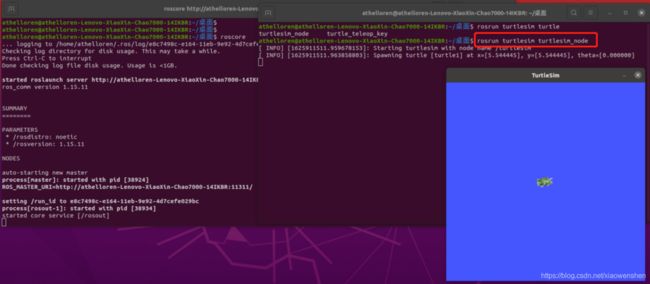
另打开一个终端输入如下指令启动小海龟节点,先前运行roscore的终端不要关掉
rosrun turtlesim turtlesim_node
这时可以看到小乌龟了,看到的小海龟样式可能不一样,因为是随机的
再打开一个终端输入如下指令,先前的终端不要关掉
rosrun turtlesim turtle_teleop_key
接下来再保证键盘控制终端激活的前提下就可以使用键盘上的导航键(方向键)来控制小海龟运动了,同时小海龟的尾部会显示出小海龟的移动轨迹。
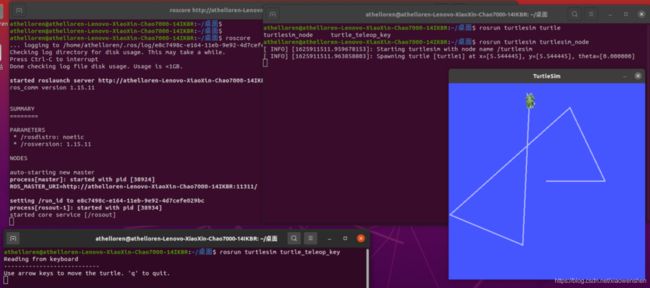
运行小海龟成功,至此ubuntu20.04上安装ROS Noetic成功完成。
下一篇:ROS Noetic入门笔记(二)ROS Noetic创建工作空间和功能包