基于Matlab多平台雷达网络生成雷达检测仿真(附源码)
目录
一、带旋转雷达阵列的机载平台
二、带有两个雷达阵列的机载平台
三、带有矩形雷达阵列的地面平台
四、机载目标
五、雷达探测的生成
六、总结
七、程序
此示例演示如何从多平台雷达网络生成雷达检测。该网络包括三个远程平台:两个机载平台和一个地面平台。此类合成数据可用于测试不同目标类型和机动的跟踪架构的性能。雷达平台和目标在场景中建模。
一、带旋转雷达阵列的机载平台
在以 650 公里/小时的速度向北行驶、巡航高度为 10 公里的场景中添加一个机载平台。使用从航点生成平台轨迹。
将平面阵列雷达添加到平台。将雷达安装在平台上方 5 米的天线罩中。将雷达建模为机械旋转相控阵。雷达以电子方式沿阵列的瞄准镜在仰角上堆叠光束。建模雷达的规格如下表所示:
-
灵敏度:0 dBsm @ 375 km
-
机械扫描:仅方位角
-
机械扫描限制:0 至 360 度
-
电子扫描:仅仰角
-
电子扫描限值:-2 至 45 度
-
视野:1度方位角,47度仰角
-
测量:方位角、仰角、范围
-
方位角分辨率:1度
-
海拔分辨率:5度
-
范围分辨率:30米
使用对机械旋转雷达进行建模。请注意,要对不执行某个角度维度扫描的雷达系统进行建模,该维度中的视场应设置为略大于相应机械扫描限制所跨越的值的值。因此,在本例中,fusionRadarSensor对象的高程视场设置为47.1度,而根据规范,建模系统的仰角视场设置为47度。
二、带有两个雷达阵列的机载平台
在以 550 公里/小时的速度向南行驶、巡航高度为 8 公里的场景中添加第二个机载平台。
一个平台上可以安装多个传感器。添加一个由安装在平台上方 5 米处的两个线性相控阵组成的雷达。安装阵列,使一个阵列查看机身右侧,另一个阵列查看机身左侧。两个阵列在平台两侧提供超过150度方位角扇区的覆盖范围。高程不是由线性阵列测量的。该雷达的规格如下表所示:
-
灵敏度:0 dBsm @ 350 km
-
机械扫描:否
-
电子扫描:仅方位角
-
电子扫描限值:-75 至 75 度
-
视野:1度方位角,60度仰角
-
测量:方位角,量程
-
方位角分辨率:1度
-
范围分辨率:30米
使用线性相控阵雷达进行建模。
三、带有矩形雷达阵列的地面平台
使用安装在拖车上方 5 米处的矩形相控阵添加地面雷达。雷达使用电子光栅扫描模式以电子方式测量60度的方位角跨度和20度的地面仰角。
-
灵敏度:0 dBsm @ 350 km
-
机械扫描:否
-
电子扫描:方位角和仰角
-
电子扫描限制:-30 至 30 度方位角,-20 至 0 度仰角
-
视野:1度方位角,5度仰角
-
测量:方位角、仰角、范围
-
方位角分辨率:1度
-
海拔分辨率:5度
-
范围分辨率:30米
使用矩形相控阵雷达建模。
四、机载目标
在监视区域内增加四个空中目标。
-
在3,000米高度以700公里/小时的速度向东北方向行驶的客机
-
在4,000米高度以900公里/小时的速度向东南行驶的客机
-
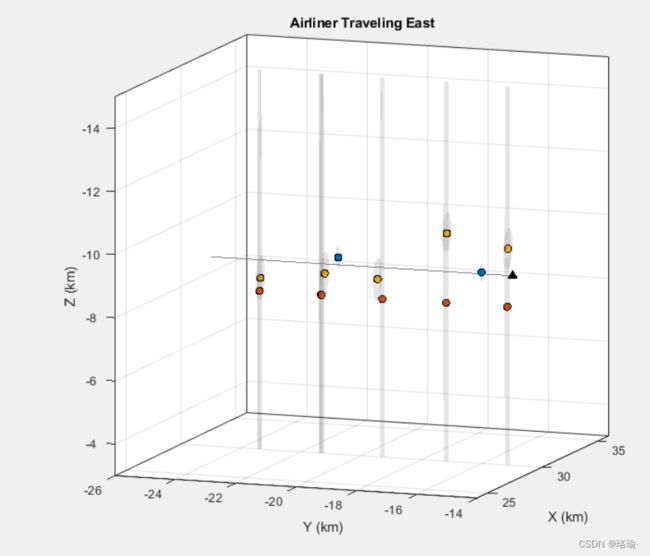
客机在9,000米高度以600公里/小时的速度向东行驶
-
喷气式飞机以 300 公里/小时的速度行驶并在 3,000 米的高度执行 90 度转弯
五、雷达探测的生成
以下循环将平台和目标位置推进,直到方案结束。对于方案中的每一步,都会从每个平台生成检测。可以以固定的时间间隔前进,也可以自动确定下一次更新时间。设置thetoto让我们确定下一次更新时间。

请注意来自机载平台的宽波束和来自执行光栅扫描的地面雷达的窄波束。您可以在下面的 2D 视图中可视化地面实况轨迹。四个目标由三角形表示。x轴上约30公里是向东行驶的客机(从左到右)。在x轴上大约2公里处是顺时针转弯的喷气式飞机。再往南是两架过境客机。

绘制记录的检测及其测量不确定度。每种颜色对应于生成检测的平台。上一个显示中的图例适用于以下所有图。请注意,雷达会生成误报,这些警报是远离目标轨迹的检测。

以下 3D 视图显示了这些检测在高程中的分布方式。对于具有3D传感器的平台(蓝色和黄色平台),检测紧密遵循目标轨迹。2D 视图平台的检测(红色平台)的高程偏离目标轨迹,因为其雷达无法测量高程。每次检测的 1-sigma 测量不确定度显示为以测量目标位置为中心的灰色椭球体(显示为实心圆圈)。

放大执行 90 度水平转弯的喷气式飞机。雷达根据雷达的分辨率和每次检测的信噪比(SNR)报告1西格玛测量不确定度。较远距离或信噪比较小的目标比较近距离或信噪比较大的目标具有更大的测量不确定性。请注意,蓝色检测的测量不确定度小于黄色检测。这是因为蓝色探测来自机载平台(平台 1),该平台比生成黄色检测的地面平台(平台 3)更接近目标。
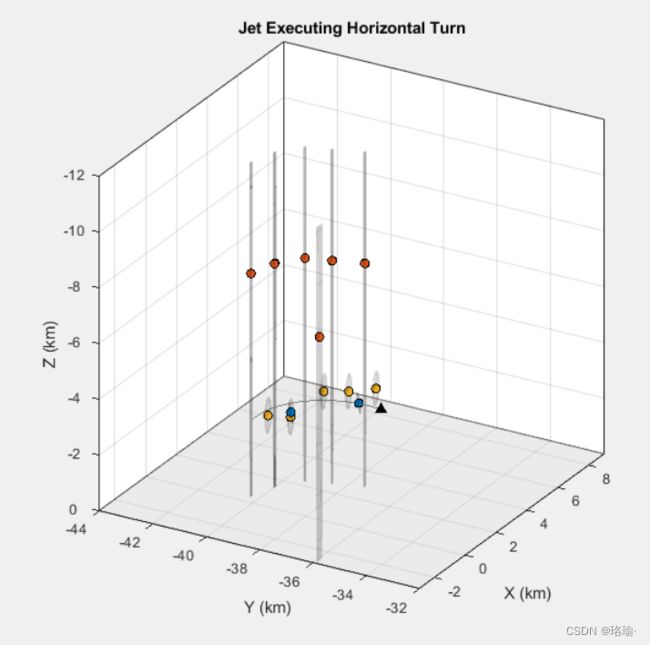
请注意,使用两个线性阵列的机载平台(平台 2)生成的红色检测的高程不确定性很大。椭球体在范围和方位方向上具有小轴,但沿仰角方向具有非常大的轴。这是因为此平台上的线性阵列无法提供高程估计值。在这种情况下,平台的雷达报告0度的检测,与仰角视野相对应的高程不确定性。
放大两架交叉客机。带有旋转阵列的蓝色机载雷达产生的检测次数最少(这两个目标只有 4 次检测),但这些检测是最精确的(最小的椭圆)。该平台的探测数量很少,这是由于其雷达的360机械扫描,这限制了其光束在场景中重新访问目标的频率。其他平台的雷达扫描区域较小,允许它们以更高的速率重新访问目标。

放大向东行驶的客机。对不同雷达平台的探测次数和准确性的相同观察结果适用。
六、总结
此示例演示如何对雷达监视网络进行建模,并模拟由多个机载和地面雷达平台生成的检测。在此示例中,学习了如何定义方案,包括可以是静止或运动的目标和平台。学习了如何可视化地面实测 轨迹、 传感器波束、 检测和相关测量不确定度。可以通过跟踪和融合算法处理此合成数据,以评估其在此方案中的性能。还可以修改此示例以针对不同的目标类型和机动练习多目标跟踪器。
七、程序
使用Matlab R2022b版本,点击打开。

打开下面的“MultiplatformRadarDetectionGenerationExample.mlx”文件,点击运行,就可以看到上述效果。

关注下面公众号,后台回复关键词:多平台雷达网络生成雷达检测仿真,发送源码链接。