吴恩达《深度学习专项》笔记(十二):目标检测与语义分割简介 (YOLO, U-Net)
这节课中,我们要学习计算机视觉中最重要的任务之一——目标检测任务。我们会先认识目标定位和关键点检测这两个比较简单的任务,慢慢过度到目标检测任务。之后,我们会详细学习目标检测的经典算法YOLO。最后,我们会稍微认识一下语义分割任务及适用于此问题的U-Net架构。
课堂笔记
目标定位
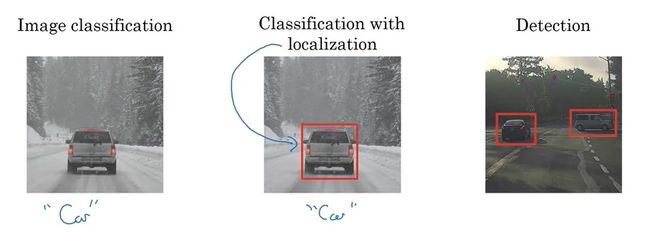
在图像分类问题中,给定一幅图片,我们只要说出图片里的物体是什么就行了。在这堂课要讨论的任务中,我们还要多做一件事——定位。我们要先用边框圈出图中的物体,再说出框里的物体是什么。这叫做带定位(localization)的分类问题。更进一步,如果我们不再是只讨论一个物体,而是要把图片中所有物体都框出来,并标出每一个物体的类别,这就是目标检测问题,
我们对分类任务的神经网络结构已经很熟悉了。那么,带定位的分类该使用怎样的网络呢?实际上,一个边框可以用边框中心和边框宽高这四个量表示。除了softmax出来的分类结果外,我们只要让网络再多输出四个数就行了。如下图所示:
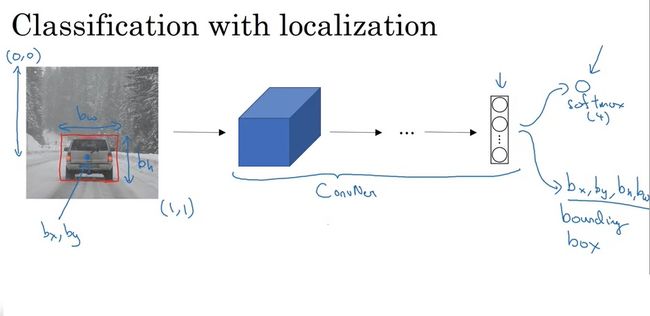
这里,要统一一下对于边框的定义。我们用 b x , b y b_x, b_y bx,by表示边框的中心坐标, b h , b w b_h, b_w bh,bw表示边框的高、宽。
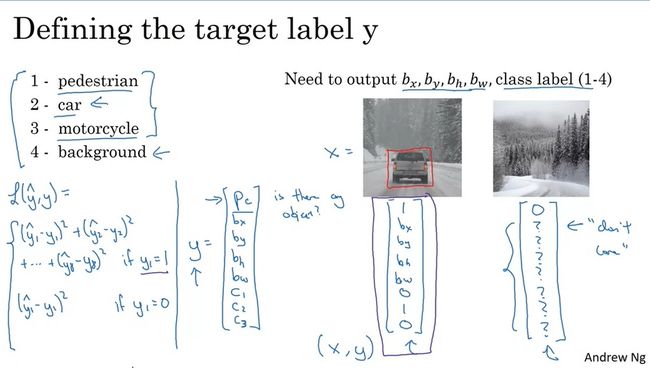
来看一下标签 y y y的具体写法。假设一共有四类物体:行人、汽车、摩托车、背景(没有物体)。那么,标签 y y y应该用 y = [ p c , b x , b y , b h , b w , c 1 , c 2 , c 3 ] T y=[p_c, b_x, b_y, b_h, b_w, c_1, c_2, c_3]^T y=[pc,bx,by,bh,bw,c1,c2,c3]T表示。其中, p c p_c pc表示图中有没有物体。若 p c = 1 p_c=1 pc=1,则 c 1 , c 2 , c 3 c_1, c_2, c_3 c1,c2,c3分别表示物体属于除背景外的哪一类;若 p c = 0 p_c=0 pc=0,则其他值无意义。
这样,在算误差时,也需要分类讨论。若 p c = 1 p_c=1 pc=1,则算估计值与标签8个分量两两之间的均方误差;若 p c = 0 p_c=0 pc=0,只算 p c p_c pc的均方误差,不用管其他量。
只要更换一下神经网络的输出格式,我们就能得到一个完成目标定位问题的网络。
关键点检测
我们刚刚学了用2个点表示一个边框。其实,拓展一下边框检测,就是一个关键点(英文有时叫做"landmark",是“地标”的意思)检测问题。
比如,在人脸关键点检测中,我们可以定义一堆关键点,分别表示眼睛、鼻子、嘴巴……的位置。我们还是让网络先输出一个数,表示图中有没有人脸;再输出2n个数,表示n个人脸关键点。这样,网络就能学习怎么标出人脸关键点了。

很多应用都基于人脸关键点检测技术。比如我们检测到了眼睛周围的关键点后,就可以给人“戴上”墨镜。
总之,通过这一节的学习,我们要知道,目标定位中输出2个坐标只是关键点检测的一个特例。只要训练数据按照某种规律标出了关键点,不管这些关键点是表示一个框,还是人脸上各器官的位置,网络都能学习这种规律。
目标检测
有了之前的知识储备,现在我们来正式学习目标检测。目标检测可以用一种叫做“滑动窗口”的技术实现。
假设我们要构建一个汽车的目标检测系统。我们可以先构造一个汽车分类数据集——数据集的x是一些等大的图片,y表示图片里是不是有汽车。如果图片里有汽车,汽车应该占据图片的大部分位置。
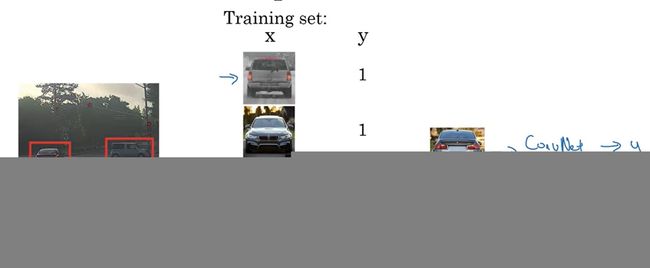
通过学习,网络就能够判断一个框里的物体是不是汽车了。这样,我们可以用一个边框框出图片的一部分,裁剪下来,让网络看看图片的这一部分是不是汽车。只要我们尝试的次数够多,总能找出图中的汽车。
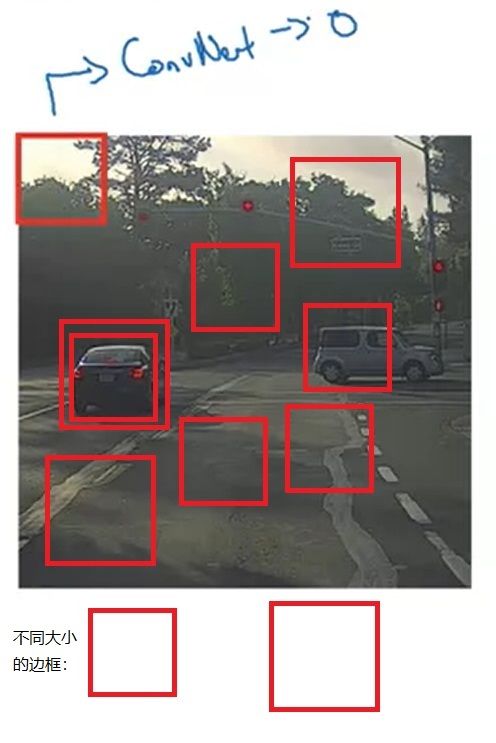
在遍历边框时,我们是通过“滑动”的方法:遍历边框的大小,选择好大小后把框放到左上角,先往右移,再往下移。所以这种方法叫做“滑动窗口”。
滑动窗口算法有一个缺点:如果我们移动窗口的步伐过小,则运行分类器的次数会很多;如果移动窗口的步伐过大,则算法的精度会受到影响。在深度学习时代之前,分类器都是一些简单的线性函数,能够快速算完,多遍历一些滑动窗口没有问题。而使用了深度CNN后,遍历滑动窗口的代价就很大了。
幸好,滑动窗口也可以通过卷积来生成,而不一定要遍历出来。让我们看下去。
基于卷积的滑动窗口
滑动窗口其实可以通过执行巧妙的卷积来生成。在那之前,我们先学一门前置技能:怎么把全连接层变成卷积层。
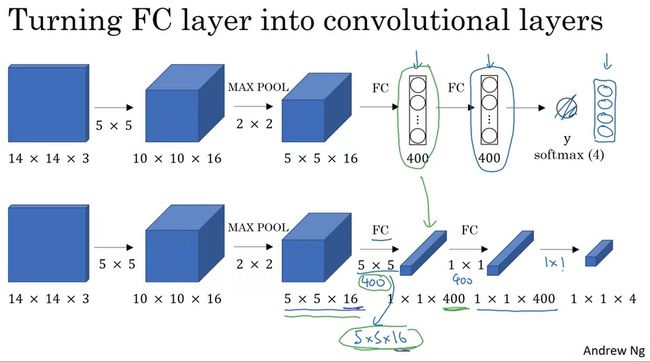
前两周学习CNN时,我们学过,卷积结束后,卷积的输出会被喂入全连接层中。实际上,我们可以用卷积来等价实现全连接层。比如下图中,一个 5 × 5 × 16 5 \times 5 \times 16 5×5×16的体积块想变成一个长度为400的向量,可以通过执行400个 5 × 5 5 \times 5 5×5的卷积来实现。
知道了这一点后,我们就可以利用卷积来快速实现滑动窗口了。
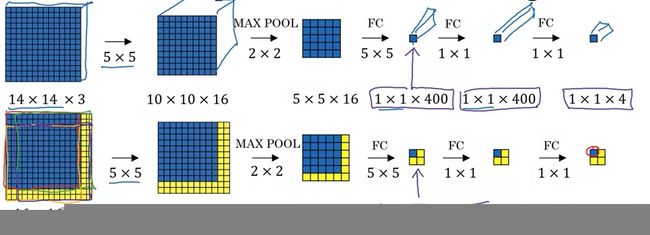
假设我们按照上一节的算法,先实现了对 14 × 14 14 \times 14 14×14的小图片进行分类的分类器。之后,我们输入了一张 16 × 16 16 \times 16 16×16的大图片。我们遍历滑动窗口,令步幅为2。这样,理论上,有4个合法的滑动窗口,应该执行4次分类器的运算,如下图所示:

可是,仔细一想,在执行4次分类器的过程中,有很多重复的运算。比如,对于4个滑动窗口中间那共有的 12 × 12 12 \times 12 12×12个像素,它们的卷积结果被算了4次。理想情况下,只需要对它们做一次卷积就行了。这该怎么优化呢?
其实,很简单,我们可以利用卷积本身的特性来优化。卷积层只定义了卷积核,而没有规定输入图像的大小。我们可以拿出之前在 14 × 14 14 \times 14 14×14的图像上训练好的卷积层,把它们用在 16 × 16 16 \times 16 16×16的图片的卷积上。经过相同的网络, 16 × 16 16 \times 16 16×16的图片会生成一个 2 × 2 2 \times 2 2×2大小的分类结果,而不是 1 × 1 1 \times 1 1×1的。这 2 × 2 2 \times 2 2×2个分类结果,恰好就是那4个滑动窗口的分类结果。通过这样巧妙地利用卷积操作,我们规避了遍历滑动窗口带来的重复计算。
不过,这个方法还是有一些缺陷的。在刚才那个例子中, 16 × 16 16 \times 16 16×16的图片其实可以放下9个 14 × 14 14 \times 14 14×14大小的边框。但是,由于分类网络中max pool的存在,我们只能生成4个分类结果,也就是步幅为2的滑动窗口的分类结果。同时,最准确的检测框也不一定是正方形的,而可能是长方形的。为了让生成的滑动窗口更准确一些,我们要用到其他方法。
预测边框
在这一节,我们要使用YOLO(You Only Look Once)算法解决上一节中碰到的问题。还记得这周课开头学的目标定位问题吗?我们可以把滑动窗口和目标定位结合一下。
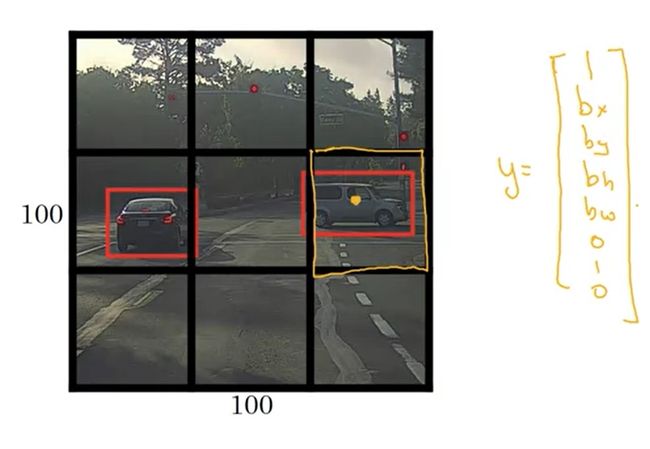
给定一幅图像,我们可以把图像分成 3 × 3 3 \times 3 3×3个格子。训练模型前,我们要对训练数据做预处理。根据每个训练样本中物体的中心点所在的格子,我们把物体分配到每一个格子中。也就是说,不管一个物体的边框跨越了几个格子,它的中心点在哪,它就属于哪个格子。比如对于下图的训练样本,右边那辆车就属于橙色的格子。之后,我们给每个格子标上标签 y y y。这个标签 y y y就是目标定位中那个表示图片中是否有物体、物体的边框、物体的类别的标签向量。对于这个 3 × 3 3 \times 3 3×3的格子,有9个标签向量,整个标签张量的形状是 3 × 3 × 8 3 \times 3 \times 8 3×3×8。
这样,每一幅图像的输出和标签一样,也是一个 3 × 3 × 8 3 \times 3 \times 8 3×3×8的张量了。输入一幅图片后,我们利用上一节学的卷积滑动窗口,同时预测出每个格子里的物体边框。
另外,这里要详细讨论一下 b x , b y , b h , b w b_x, b_y, b_h, b_w bx,by,bh,bw的表示方法。由于我们只关心框相对于格子的位置,因此我们可以把规定一个格子的边长为1。这样,就满足 0 ≤ b x , b y ≤ 1 0 \leq b_x, b_y \leq 1 0≤bx,by≤1了。不过,由于物体的边框可以超出小框, b h , b w > 1 b_h, b_w > 1 bh,bw>1是很有可能的。
看到这,大家可能会有一些疑问:如果一个格子里有多个物体呢?的确,这个算法无法输出一个格子里的多个物体。一种解决方法是,我们可以把格子分得更细一点,比如 19 × 19 19 \times 19 19×19个格子。这样,可以被检测到物体会多一些。但是,增加格子数又会引入一个新的问题——多个格子检测到了同一个物体。下面的两节里我们会尝试解决这个新的问题。
吴恩达老师说,YOLO这篇论文很难读懂,他和其他几个资深研究者都花了很大的功夫才读懂这篇论文。
IoU(交并比)
在目标检测中,有一个微妙的问题:框出一个物体的边框有无数个,想精确框出标签的边框是不可能的。怎么判定一个输出结果和标签里的边框“差不多”呢?这就要用到IoU(Intersection over Union,交并比) 这个概念。
IoU,顾名思义,二者的交集比上二者的并集,很好理解。比如下图中,网络的输出是紫框,真值是红框。二者的并集是绿色区域,交集是橙色区域。则IoU就是橙色比绿色。

依照惯例,如果IoU ≥ 0.5 \geq 0.5 ≥0.5,我们就认为网络的输出是正确的。当然,想更严格一点,0.6,0.7也是可以的。
IOU 也是 "I owe you(我欠了你的钱)"的缩写,哈哈哈。
NMS(非极大值抑制)
假设在YOLO中,我们用 19 × 19 19 \times 19 19×19个小格来检测物体。可是,由于小格子太多了,算法得到了多个重复的检测框(以及每个框中有物体的概率)。这该怎么办呢?
NMS(Non-Maximum Suppresion,非极大值抑制)就是解决这个问题的算法。这个算法的名字听起来很奇怪,但大家理解了这个算法的实现后,就知道这个“抑制”是什么意思了。
讲起算法我就不困了。我会抛弃视频中的讲解思路,用我自己的逻辑讲一遍。讲算法,千万不能一上来就讲算法的步骤,一定要先讲清楚算法的思路。
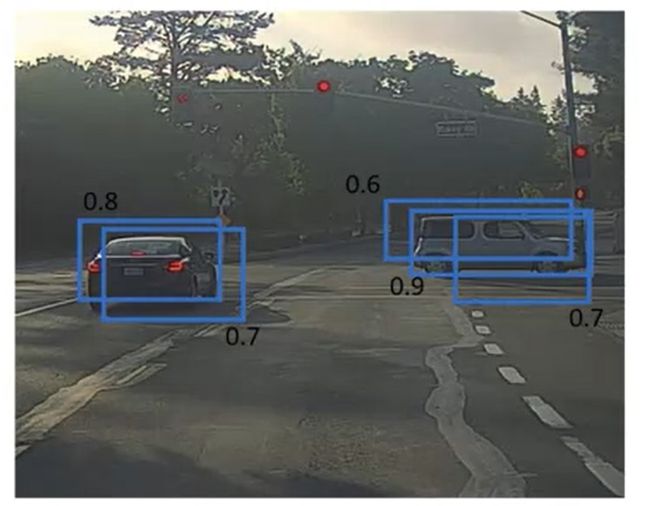
在学NMS之前,我们先动动脑,看看在去掉重复的框时,我们期望得到怎样的去重输出结果。
首先,既然是去重,那么就不能出现两个框过度重合的情况。其次,我们希望留下来的框的预测概率尽可能大。
在这两个要求下,我们来看看上面那幅图的输出应该是怎样的。
我们一眼就能看出,对于左边那辆车,我们应该保留0.8的框;对于右边那辆车,我们应该保留0.9的框。
为什么我们能“一眼看出”呢?这是因为左边两个框、右边三个框恰好都分别表示了一辆车。我们能够快速地把这些框分成两类。但是,在情况比较复杂时,我们就难以快速找出最好的框了。比如下面这种情况中,两辆车很近,有些框甚至同时标出了两辆车:
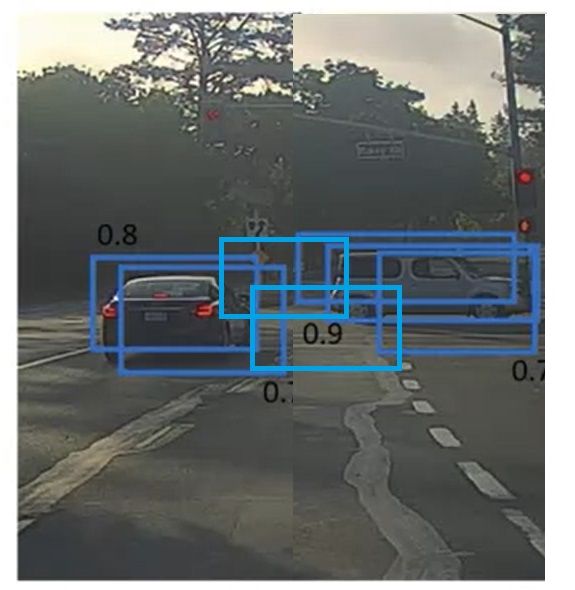
为了处理这种复杂的情况,我们必须想出一种万全的算法,以筛选出那些概率比较大的框。
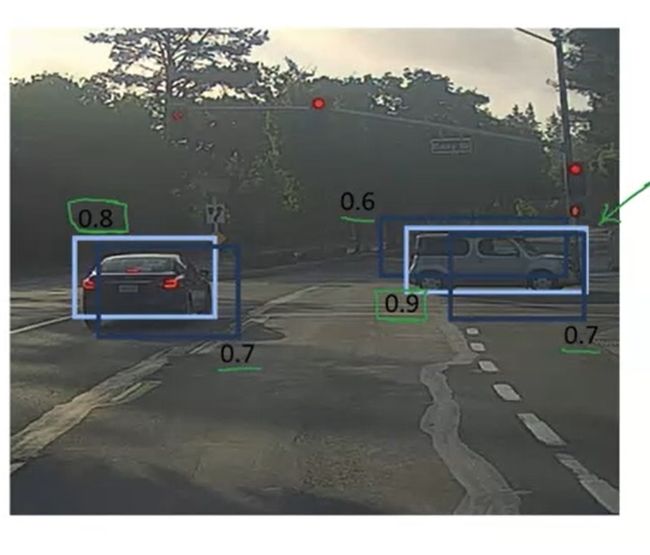
稍微思考一下,其实这样的算法非常简单:找出最大的框,去掉所有和它过度重合的框;在剩下的框中,找出最大的框,去掉所有和它过度重合的框;……。一直重复直到没有未处理的框为止。这就是NMS算法。
还是让我们来看看刚刚那个例子。使用NMS时,我们会先找到0.9这个框,“抑制”掉右边0.6和0.7的框。在剩下的框中,最大的是0.8这个框,它会“抑制”掉左边那个0.7的框。
接下来,让我们来严格描述一下这个算法。假设我们有 19 × 19 = 361 19 \times 19=361 19×19=361个输出结果,每个输出结果是一个长度为5的向量 [ p c , b x , b y , b h , b w ] [p_c, b_x, b_y, b_h, b_w] [pc,bx,by,bh,bw],分别表示有物体的概率、边框的中心和高宽(我们先不管检测多个物体的情况。事实上,当推广到多个物体时,只要往这个输出结果里多加几个概率就行了)。我们要用NMS输出应该保留的检测结果。“过度重合”,就是两个框的IoU大于0.5。
首先,先做一步初筛,扔掉概率 p c p_c pc小于0.6的结果。
之后,对于没有遍历的框,重复执行:找出概率最大的框,把它加入输出结果;去掉所有和它IoU大于0.5的框。
这个过程用伪代码表示如下:
# Input and preprocessing
input predicts of size [19, 19, 5]
resize predicts to [361, 5]
# Filter predicts with low probability
filtered_predicts = []
for predict in predicts:
# drop p_c < 0.6
if predict[0] >= 0.6:
filtered_predicts.append(predict)
# NMS
n_remainder = len(filtered_predicts)
vis = [False] * n_remainder # False for unvisited item
output_predicts = []
while n_remainder > 0:
max_pro = -1
max_index = 0
# Find argmax
for i, p in enumerate(filtered_predicts):
if not vis[i]:
if max_pro < p[0]:
max_index = i
max_pro = p[0]
# Append output
max_p = filtered_predicts[max_index]
output_predicts.append(max_p)
# Suppress
for i, p in enumerate(filtered_predicts):
if not vis[i] and i != max_index:
if get_IoU(p[1:5], max_p[1:5]) > 0.5:
vis[i] = True
n_remainder -= 1
vis[max_index] = True
n_remainder -= 1
假设进NMS的框有 N N N个。算法里求当前最大框那一步可以用优先队列来优化,这一步复杂度是 O ( l o g N ) O(logN) O(logN)。但是“抑制”那一步必须要遍历一遍剩下的框,还是有一个 O ( N ) O(N) O(N)复杂度(我暂时想不出朴素的低复杂度的算法)。因此,不用优先队列优化也差不多。算上外层的循环,整个算法的复杂度是 O ( N 2 ) O(N^2) O(N2)。在实际的应用中,送入NMS的结果没那么多,不会超过10000个。而且,随着框被不断过滤,外层循环的次数会减少不少。这个算法的性能瓶颈不在输入数 N N N上,而在于求IoU实现的细节上。
锚框(Anchor Boxes)
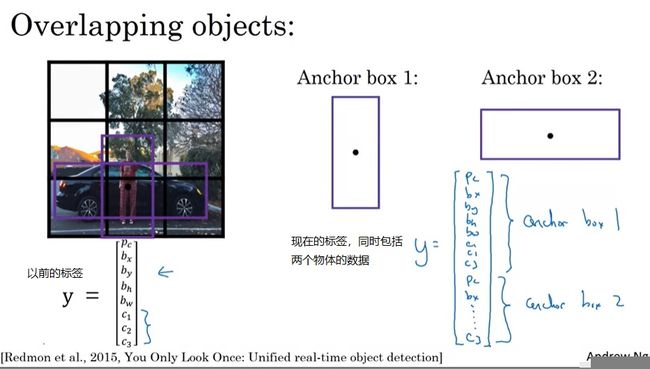
为了让一个格子能够检测到多个物体,YOLO论文还提出了一种叫做锚框(Anchor Boxes)的技术。
假设一个格子里同时包含了两个物体:一个“竖着”的人和一个“横着”的车。那么,我们可以以这个格子的中心点为“锚”,画一个竖的框和横的框,让每个格子可以检测到两个物体。这样,人和车都能被检测了。
严谨地描述,锚框技术是这样做改进的:
- 之前,每一个格子只能包含一个样本。训练数据中每一个标签框会被分配到它中点所在的格子。
- 现在,每一个格子能包含多个样本。每个格子都会预定义几个不同形状的锚框,有几个锚框,就最多能检测到几个物体。训练数据的每一个标签框会被分配到和它交并比最大的的锚框。
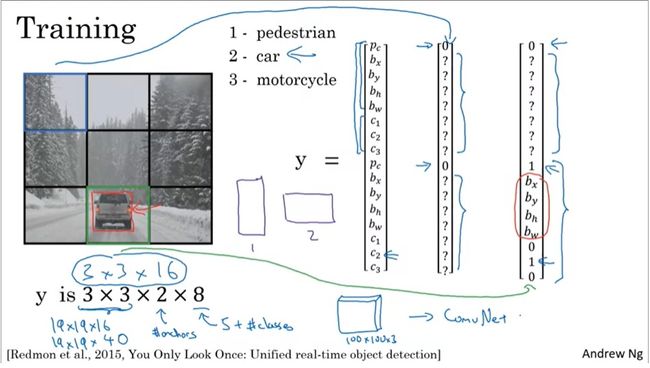
注意,之前的最小单元是格子,现在是锚框,所以说现在每个样本被分配到锚框上而不是格子上。可以看下面这两个样本的例子,第一个例子是两个物体都检测到了,第二个是只有锚框2里有物体。和之前一样,如果有某个锚框里没有物体,则除了 p c p_c pc外全填问号即可。
锚框技术实际上只是对训练数据做了一个约束,改变了训练数据的格式。检测算法本身没有什么改变。
YOLO 算法总结
让我们把前几节的内容总结一下,看一下YOLO算法的全貌。
在训练前,我们要对数据做预处理。首先,我们要指定以下超参数:图片切分成多大的格子、每个格子里有多少个锚框。之后,根据这些信息,我们可以得到每一个训练标签张量的形状。比如 3 × 3 × 2 × 8 3 \times 3 \times 2 \times 8 3×3×2×8的一个训练标签,表示图片被切成了 3 × 3 3 \times 3 3×3的格子,每个格子有两个锚框。这是一个三分类问题,对于每一个检测出来的物体,都可以用一个长度为 8 8 8的向量表示。其中, p c p_c pc表示这个锚框里有没有物体, ( b x , b y ) , ( b h , b w ) (b_x, b_y), (b_h, b_w) (bx,by),(bh,bw)分别表示中心点坐标、框的高宽, c 1 , c 2 , c 3 c_1, c_2, c_3 c1,c2,c3分别表示是否该类物体。
有了预处理好的训练数据,就可以训练一个CNN了。
在网络给出了输出后,由于输出的框往往多于标签中的框,还要对输出结果进行筛选。筛选的过程如前文所述,先去掉概率过小的框,再分别对每一类物体的框做NMS。
区域提案
YOLO算法是在一堆固定的框里找物体。实际上,我们还可以用神经网络来找出候选框,再在这些框里详细检测。这种技术就叫做区域提案(region proposal),相关的网络叫做R-CNN(Region with CNN)。
R-CNN 系列网络有多个改进版本:
- R-CNN: 使用区域提案,但是每次只对一个区域里的物体做分类。
- Fast R-CNN: 使用区域提案,并使用基于卷积的滑动窗口加速各区域里物体的分类。
- Faster R-CNN: 前两个算法都是用传统方法提案区域,Faster R-CNN用CNN来提案区域,进一步令算法加速。
吴恩达老师认为,虽然区域提案的方法很酷,但把目标检测分两步来完成还是太麻烦了,一步到位的YOLO系列算法已经挺方便了。
基于U-Net的语义分割
最早这门课是没有这一节的,估计U-Net的架构太常用了,吴恩达老师把基于U-Net的语义分割加入了这周的课中。
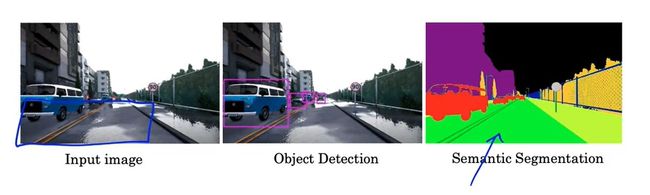
语义分割也是应用非常广泛的一项CV任务。相较于只把物体框出来的目标检测,语义分割会把每一类物体的每个像素都精确地标出来。如下图的示例所示,输入一张图片,语义分割会把每一类物体准确地用同一种颜色表示。
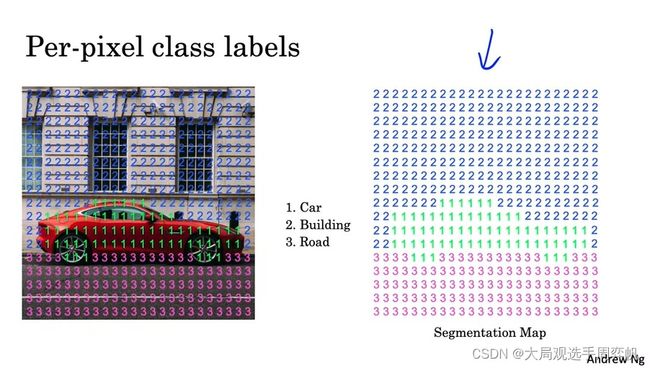
具体来说,语义分割的输出是一个单通道图片。图片的数字表示此处像素的类别。
在分类模型中,图像会越卷越小,最后压平放进全连接层并输出多个类别的分类概率。而在语义分割模型中,由于模型的输出也是一幅图像,在输入图像被卷小了以后,应该还有一个放大的过程。
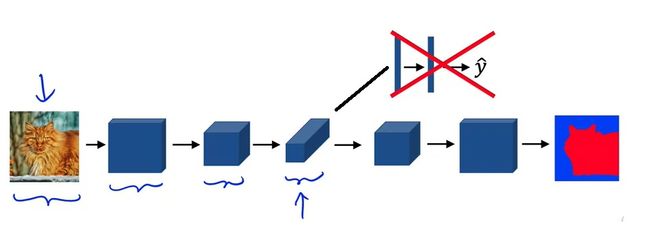
目前,我们还没有学过带学习参数的可以放大图像分辨率的结构。下一节介绍的反卷积能够完成这件事。
反卷积
反卷积和卷积的输入输出大小彻底相反。让我们看看反卷积的形状是怎么计算的。
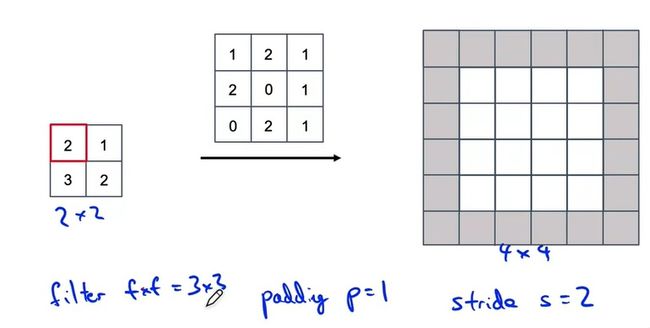
如上图所示,反卷积也有卷积核大小、步幅、填充这些参数。不过这些参数都是在输出图像上做的。也就是说,我们会在输出图像上做填充,并且每次在输出图像上一步一步移动。我们把正卷积的输出大小计算公式套到反卷积上的输出上,就能算出反卷积的输入的大小。
在卷积时,我们是把卷积核与图像对应位置的数字乘起来,再求和,算出一个输出值;反卷积则是反了过来,把一个输入值乘到卷积核的每个位置上,再把乘法结果放再输出的对应位置上。一趟反卷积计算如下图所示:
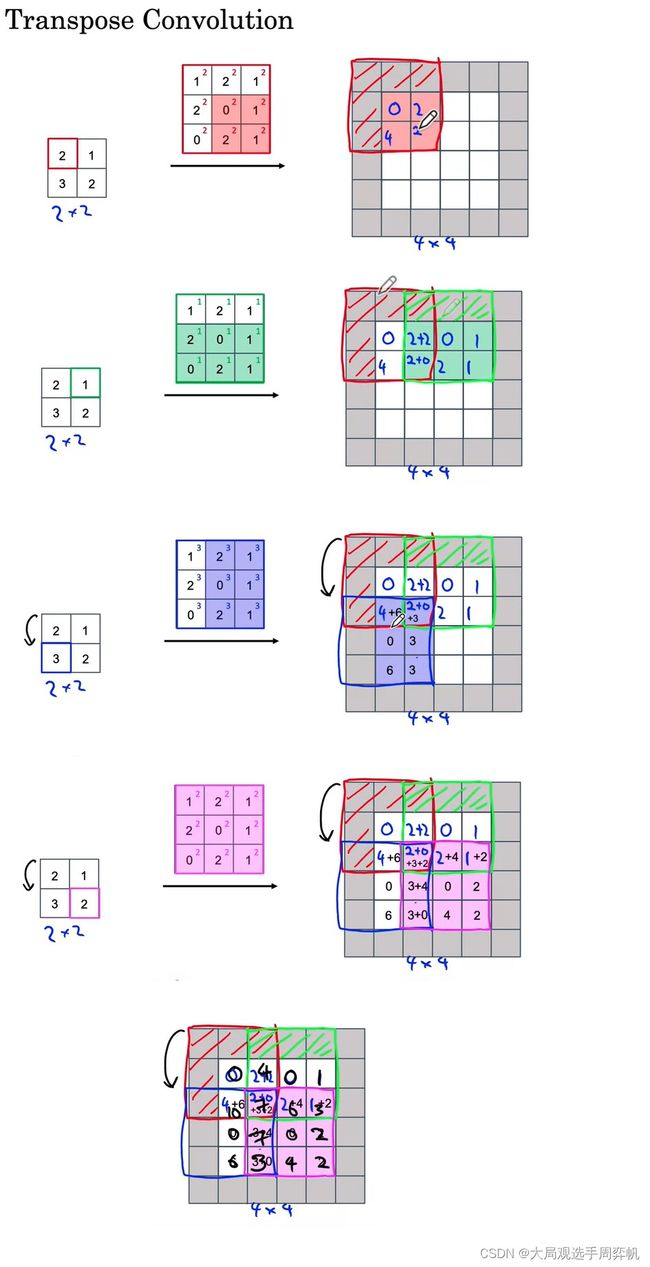
这里我们只需要知道反卷积可以做上采样就行了,不需要纠结底层实现细节。
本课对反卷积的介绍甚少。实际上,反卷积可以通过正卷积来实现。我扫了一圈没看到讲解得比较好的相关文章,有兴趣的可以自行查找资料。
U-Net 架构
学完了反卷积,可以来看U-Net的结构了。
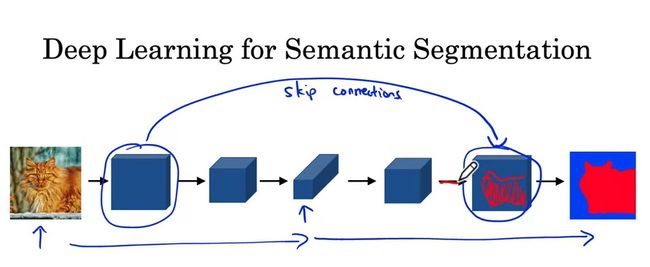
U-Net除了对图像使用了先缩小再放大的卷积外,还使用了一种跳连(不是ResNet中残差连接的跳连,而是把两份输入拼接在了一起)。这样,在反卷积层中,不仅有来自上一层的输入,还有来自前面相同大小的正卷积的结果。这样做的好处是,后半部分的网络既能获得前一个卷积的抽象、高级(比如类别)的输入,又能获得前半部分网络中具体,低级的特征(比如形状)。这样,后面的层能够更好地生成输出。
U-Net具体的结构如下:
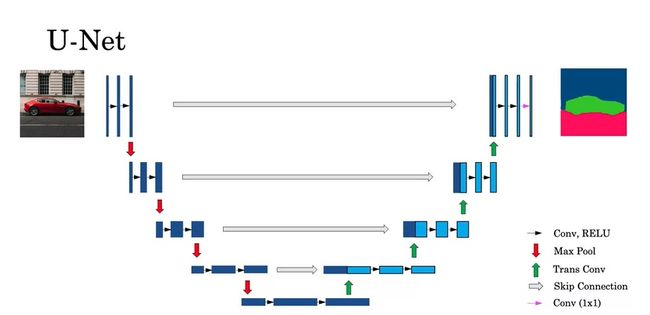
这幅图中,做运算的图像张量被表示成了一个二维矩形,矩形的高度是图像的宽高,矩形的宽度是通道数。U-Net的前半部分和常见的CNN一样,缩小图像大小,增大图像通道数。而在后半部分中,每次上采样时,一半的通道来自上一层的输出,另一半的通道来自于网络前半部分。
从图中能看出,U-Net的结构图是一个“U”型,因此它才被叫做U-Net。
总结
在这篇文章中,我们主要学习了以下内容:
- 任务定义与输出格式
- 目标定位
- 关键点检测
- 目标检测
- 语义分割
- YOLO
- 用卷积实现全连接
- 用卷积实现滑动窗口
- 锚框
- IoU
- NMS
- YOLO算法
- U-Net
- 反卷积
- U-Net架构