3D视觉(六):PnP问题(pespective-n-point)
3D视觉(六):PnP问题(pespective-n-point)
PnP问题,是指已知3D点(x, y, z)及其在相机上的投影(u,v),求解相机位姿变换R、T。
投影方程可表示为:
 这里K为相机内参矩阵,是已知的。我们要做的就是,从n对这样的2D-3D对应关系中,恢复出相机姿态变换,即旋转矩阵R和平移向量t。
这里K为相机内参矩阵,是已知的。我们要做的就是,从n对这样的2D-3D对应关系中,恢复出相机姿态变换,即旋转矩阵R和平移向量t。
文章目录
- 3D视觉(六):PnP问题(pespective-n-point)
- 一、算法原理
- 二、实验过程
- 三、源码
- 四、项目链接
一、算法原理
典型的PnP问题求解方式有很多种,例如P3P、直接线性变换DLT、EPnP、UPnP,另外还有非线性的Bundle Adjustment。下面简单推导一下直接线性变换DLT的原理。
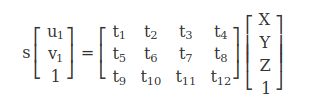
考虑某个空间点P,它的齐次坐标为P=(X, Y, Z, 1).T,投影到图像中得到特征点x1=(u1, v1, 1).T。我们定义增广矩阵 [R|t] 为一个3*4矩阵,模型的数学表达式为:
用最后一行把s消去,得到两个约束:

为简化表示,定义T的行向量:
![]()
则上面两个约束可以转化成矩阵形式:
![]()
可以看到,每个特征点能提供两个关于旋转平移矩阵T的线性约束。假设一共拥有N个特征点,则可列出如下线性方程组:

旋转平移矩阵T一共有12维,因此最少通过6对匹配点即可实现矩阵T的线性求解,这种方法称为DLT。当匹配点大于6对时,也可以使用SVD等方法对超定方程求最小二乘解。
二、实验过程
利用人脸关键点2D图像坐标,和3D人脸模板关键点坐标,求解头部姿态。
人脸2D关键点图像坐标如下:


3D人脸模板关键点的3D坐标如下:

利用cv::solvePnP函数,求解位姿变换结果:

头部姿态可视化效果如下:

三、源码
#include 四、项目链接
如果代码跑不通,或者想直接使用数据集,可以去下载项目链接:
https://blog.csdn.net/Twilight737