【PyTorch教程】P25 pytorch中现有模型
P25 pytorch中现有模型
-
位置:
-
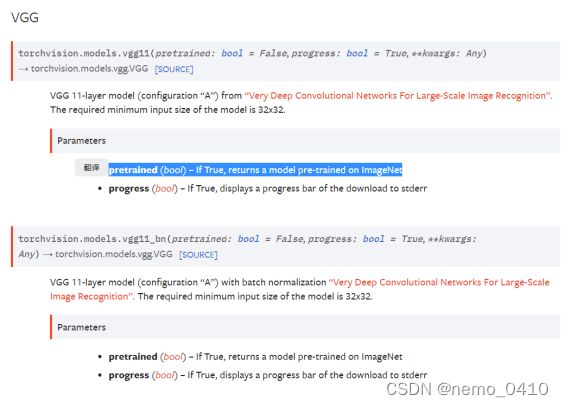
预训练的意思pretrain,是已经在ImageNet数据集上训练好的:progress是对下载的管理:
-
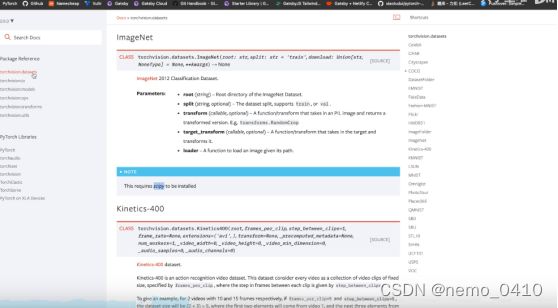
使用的dataset,ImageNet:需要安装scipy库:
-
点开这个ImageNet看里面的信息:
-
里面的重要信息:

-
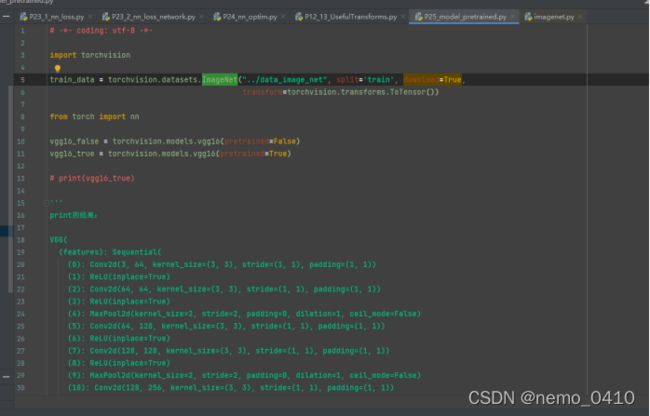
转而使用已经训练好的model:

-
上图:false意思是不下载已经在ImageNet里面训练好的模型,即conv、pooling layers里面的那些参数,而true就要下载他们。
对比二者的参数:
-
使用vgg16,用在CIFAR数据集上,进行分类:
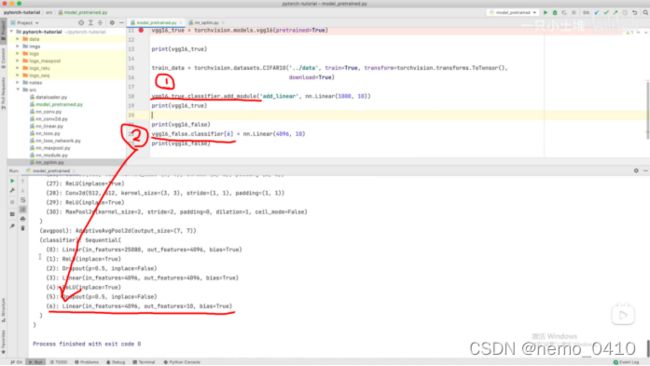
Vgg16训练时,用的是ImageNet数据集,它把数据分为1000个类,而CIFAR把数据分为10类,那么就有两种做法,来利用vgg16来处理 CIFAR数据集:1、vgg16后面加一个新的线性层,使1000映射到10;2、直接把vgg16最后的输出层改为10类:这里的add_module是集成 - 在pytorch当中的方法了,直接用:
下图是第一种方法:

-
还有下面这种写法,可以把新添加的层,放在classifier的框架底子,变成classifier的子集,原来是在大的框架vgg的直属下面:

-
下面是第二个方法:替换原来的输出类型数:图中圈2:
可以运行的代码
# -*- coding: utf-8 -*-
import torchvision
train_data = torchvision.datasets.ImageNet("../data_image_net", split='train', download=True,
transform=torchvision.transforms.ToTensor())
from torch import nn
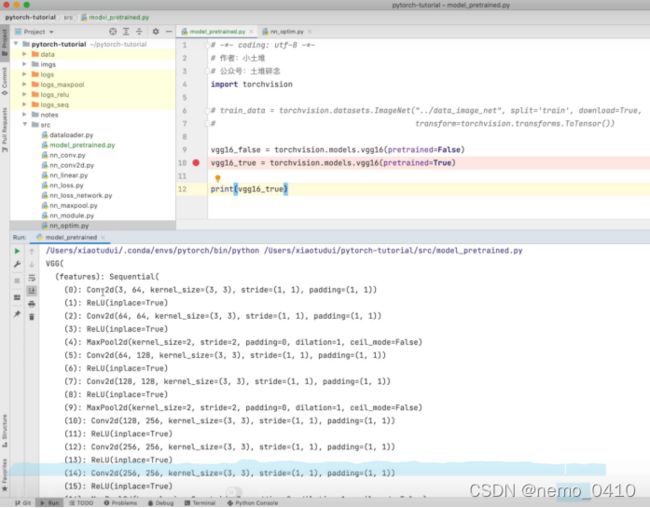
vgg16_false = torchvision.models.vgg16(pretrained=False)
vgg16_true = torchvision.models.vgg16(pretrained=True)
# print(vgg16_true)
'''
print的结果:
VGG(
(features): Sequential(
(0): Conv2d(3, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace=True)
(2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(3): ReLU(inplace=True)
(4): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(5): Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(6): ReLU(inplace=True)
(7): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(8): ReLU(inplace=True)
(9): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(10): Conv2d(128, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(11): ReLU(inplace=True)
(12): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(13): ReLU(inplace=True)
(14): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(15): ReLU(inplace=True)
(16): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(17): Conv2d(256, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(18): ReLU(inplace=True)
(19): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(20): ReLU(inplace=True)
(21): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(22): ReLU(inplace=True)
(23): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(24): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(25): ReLU(inplace=True)
(26): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(27): ReLU(inplace=True)
(28): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(29): ReLU(inplace=True)
(30): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(avgpool): AdaptiveAvgPool2d(output_size=(7, 7))
(classifier): Sequential(
(0): Linear(in_features=25088, out_features=4096, bias=True)
(1): ReLU(inplace=True)
(2): Dropout(p=0.5, inplace=False)
(3): Linear(in_features=4096, out_features=4096, bias=True)
(4): ReLU(inplace=True)
(5): Dropout(p=0.5, inplace=False)
(6): Linear(in_features=4096, out_features=1000, bias=True) # 由于 imagenet 数据集,他的分类结果是 1000,所以这里out_features 值为1000
) # 要想用于 CIFAR10 数据集, 可以在网络下面多加一行,转成10分类的输出
)
'''
train_data = torchvision.datasets.CIFAR10('../dataset', train=True, transform=torchvision.transforms.ToTensor(),
download=True)
# vgg16_true.add_module('add_linear',nn.Linear(1000, 10))
# 要想用于 CIFAR10 数据集, 可以在网络下面多加一行,转成10分类的输出,这样输出的结果,跟下面的不一样,位置不一样
vgg16_true.classifier.add_module('add_linear', nn.Linear(1000, 10))
# 层级不同
# 如何利用现有的网络,改变结构
print(vgg16_true)
# 上面是添加层,下面是如何修改VGG里面的层内容
print(vgg16_false)
vgg16_false.classifier[6] = nn.Linear(4096, 10) # 中括号里的内容,是网络输出结果自带的索引,套进这种格式,就可以直接修改那一层的内容
print(vgg16_false)
'''
这个教程,可以自己修改别人已经写好了的模型,或者在里面添加自己的需求
'''
完整目录
- P6-P7 数据加载
- P8-9 Tensorboard使用
- P10-11 Transform的用法
- P12-13 常用的tranforms
- P14 torchvision中的数据集的使用
- P15 dataloader的使用
- P16 nn.Module
- P17 卷积
- P18 卷积层使用
- P19 池化
- P20 ReLU
- P21线性层和其它层
- P22 squential和小实战
- P23 loss function
- P24 优化器
- P25 pytorch中现有模型
- P26 网络模型的保存和加载
- P27、28、29 完整的模型套路
- P30 GPU加速
- P31 GPU加速_2
- P32 完整的模型验证套路
- P33 github的使用