语音控制机器人小车运动科大讯飞SDK
在前面文章小车实现语音识别的基础之上,对小车实现语音控制运动
修改CMakeLists.txt文件

在末尾加上以下代码:
add_executable(sub_word src/sub_word.cpp)
target_link_libraries(sub_word ${catkin_LIBRARIES} )
修改发布文件
打开xfei_asr/src目录下的int_publish_speak.cpp文件,然后将下面的代码覆盖进去,请将appid填写为你在讯飞那申请的appid 。修改后的发布文件,将是全程自动唤醒不再是每次唤醒都需要手动输入代码。
#include 添加指令文件
创建新的文件命名为sub_word.cpp 粘贴以下代码。具体识别控制指令执行请按需修改
#include测试
测试前记得编译啊
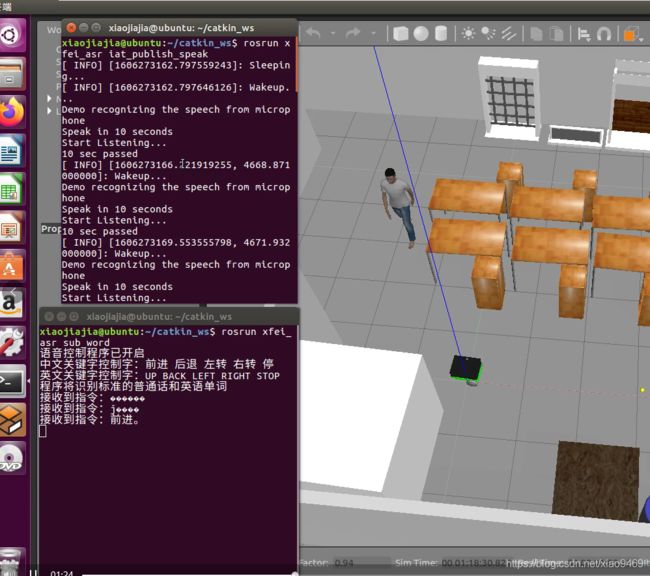
依次在终端执行以下命令,然后对麦克风说控制命令。建议打开翻译等软件说标准的普通话或英文,识别度更高
roslaunch e100_sim gazebo.launch
rosrun xfei_asr iat_publish_speak
rosrun xfei_asr sub_word
成功控制小车运动。