PyTorch模型定义和训练技巧
-
模型定义方式
nn.Sequential()
两种方式,直接定义和有序字典,但是如果有很多一样的层可能不方便
## Sequential: Direct list
import torch.nn as nn
net1 = nn.Sequential(
nn.Linear(784, 256),
nn.ReLU(),
nn.Linear(256, 10),
)
print(net1)
## Sequential: Ordered Dict
import collections
import torch.nn as nn
net2 = nn.Sequential(collections.OrderedDict([
('fc1', nn.Linear(784, 256)),
('relu1', nn.ReLU()),
('fc2', nn.Linear(256, 10))
]))
print(net2)nn.ModuleList()
nn.ModuleList()并没有定义一个网络,它只是将不同的模块储存在一起,要放到初始化函数中。
class Net3(nn.Module):
def __init__(self):
super().__init__()
self.modulelist = nn.ModuleList([nn.Linear(784, 256), nn.ReLU()])
self.modulelist.append(nn.Linear(256, 10))
def forward(self, x):
for layer in self.modulelist:
x = layer(x)
return x
net3_ = Net3()
out3_ = net3_(a)
print(out3_.shape)nn.ModuleDict()
class ModuleDict(nn.Module):
def __init__(self):
super(ModuleDict, self).__init__()
self.choices = nn.ModuleDict({
'conv': nn.Conv2d(10, 10, 3),
'pool': nn.MaxPool2d(3)
})
self.activations = nn.ModuleDict({
'relu': nn.ReLU(),
'prelu': nn.PReLU()
})
def forward(self, x, choice, act):
x = self.choices[choice](x)
x = self.activations[act](x)
return x
net = ModuleDict()
fake_img = torch.randn((4, 10, 32, 32))
output = net(fake_img, 'conv', 'relu')
print(output)
-
利用模块快速搭建网络
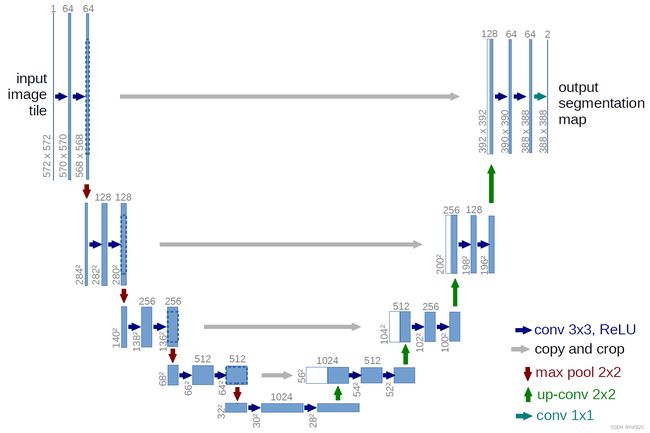
U-Net搭建
import os
import numpy as np
import collections
import torch
import torch.nn as nn
import torch.nn.functional as F
import torchvision
class DoubleConv(nn.Module):
"""(convolution => [BN] => ReLU) * 2"""
def __init__(self, in_channels, out_channels, mid_channels=None):
super().__init__()
if not mid_channels:
mid_channels = out_channels
self.double_conv = nn.Sequential(
nn.Conv2d(in_channels, mid_channels, kernel_size=3, padding=1, bias=False),
nn.BatchNorm2d(mid_channels),
nn.ReLU(inplace=True),
nn.Conv2d(mid_channels, out_channels, kernel_size=3, padding=1, bias=False),
nn.BatchNorm2d(out_channels),
nn.ReLU(inplace=True)
)
def forward(self, x):
return self.double_conv(x)
class Down(nn.Module):
"""Downscaling with maxpool then double conv"""
def __init__(self, in_channels, out_channels):
super().__init__()
self.maxpool_conv = nn.Sequential(
nn.MaxPool2d(2),
DoubleConv(in_channels, out_channels)
)
def forward(self, x):
return self.maxpool_conv(x)
class Up(nn.Module):
"""Upscaling then double conv"""
def __init__(self, in_channels, out_channels, bilinear=True):
super().__init__()
# if bilinear, use the normal convolutions to reduce the number of channels
if bilinear:
self.up = nn.Upsample(scale_factor=2, mode='bilinear', align_corners=True)
self.conv = DoubleConv(in_channels, out_channels, in_channels // 2)
else:
self.up = nn.ConvTranspose2d(in_channels, in_channels // 2, kernel_size=2, stride=2)
self.conv = DoubleConv(in_channels, out_channels)
def forward(self, x1, x2):
x1 = self.up(x1)
# input is CHW
diffY = x2.size()[2] - x1.size()[2]
diffX = x2.size()[3] - x1.size()[3]
x1 = F.pad(x1, [diffX // 2, diffX - diffX // 2,
diffY // 2, diffY - diffY // 2])
x = torch.cat([x2, x1], dim=1)
return self.conv(x)
class OutConv(nn.Module):
def __init__(self, in_channels, out_channels):
super(OutConv, self).__init__()
self.conv = nn.Conv2d(in_channels, out_channels, kernel_size=1)
def forward(self, x):
return self.conv(x)
## 组装
class UNet(nn.Module):
def __init__(self, n_channels, n_classes, bilinear=True):
super(UNet, self).__init__()
self.n_channels = n_channels
self.n_classes = n_classes
self.bilinear = bilinear
self.inc = DoubleConv(n_channels, 64)
self.down1 = Down(64, 128)
self.down2 = Down(128, 256)
self.down3 = Down(256, 512)
factor = 2 if bilinear else 1
self.down4 = Down(512, 1024 // factor)
self.up1 = Up(1024, 512 // factor, bilinear)
self.up2 = Up(512, 256 // factor, bilinear)
self.up3 = Up(256, 128 // factor, bilinear)
self.up4 = Up(128, 64, bilinear)
self.outc = OutConv(64, n_classes)
def forward(self, x):
x1 = self.inc(x)
x2 = self.down1(x1)
x3 = self.down2(x2)
x4 = self.down3(x3)
x5 = self.down4(x4)
x = self.up1(x5, x4)
x = self.up2(x, x3)
x = self.up3(x, x2)
x = self.up4(x, x1)
logits = self.outc(x)
return logits-
模型修改
对特定层的修改,可以对该层重新实例化
## 修改特定层
import copy
unet1 = copy.deepcopy(unet)
unet1.outc
b = torch.rand(1,3,224,224)
out_unet1 = unet1(b)
print(out_unet1.shape)
unet1.outc = OutConv(64, 5)
unet1.outc
out_unet1 = unet1(b)
print(out_unet1.shape)添加额外的输入,在forward函数中加上参数和使用参数的方法
## 添加额外输入
class UNet2(nn.Module):
def __init__(self, n_channels, n_classes, bilinear=True):
super(UNet2, self).__init__()
self.n_channels = n_channels
self.n_classes = n_classes
self.bilinear = bilinear
self.inc = DoubleConv(n_channels, 64)
self.down1 = Down(64, 128)
self.down2 = Down(128, 256)
self.down3 = Down(256, 512)
factor = 2 if bilinear else 1
self.down4 = Down(512, 1024 // factor)
self.up1 = Up(1024, 512 // factor, bilinear)
self.up2 = Up(512, 256 // factor, bilinear)
self.up3 = Up(256, 128 // factor, bilinear)
self.up4 = Up(128, 64, bilinear)
self.outc = OutConv(64, n_classes)
def forward(self, x, add_variable):
x1 = self.inc(x)
x2 = self.down1(x1)
x3 = self.down2(x2)
x4 = self.down3(x3)
x5 = self.down4(x4)
x = self.up1(x5, x4)
x = self.up2(x, x3)
x = self.up3(x, x2)
x = self.up4(x, x1)
x = x + add_variable #修改点
logits = self.outc(x)
return logits
unet2 = UNet2(3,1)
c = torch.rand(1,1,224,224)
out_unet2 = unet2(b, c)
print(out_unet2.shape)添加额外输出就是在return中加上输出的东西
## 添加额外输出
class UNet3(nn.Module):
def __init__(self, n_channels, n_classes, bilinear=True):
super(UNet3, self).__init__()
self.n_channels = n_channels
self.n_classes = n_classes
self.bilinear = bilinear
self.inc = DoubleConv(n_channels, 64)
self.down1 = Down(64, 128)
self.down2 = Down(128, 256)
self.down3 = Down(256, 512)
factor = 2 if bilinear else 1
self.down4 = Down(512, 1024 // factor)
self.up1 = Up(1024, 512 // factor, bilinear)
self.up2 = Up(512, 256 // factor, bilinear)
self.up3 = Up(256, 128 // factor, bilinear)
self.up4 = Up(128, 64, bilinear)
self.outc = OutConv(64, n_classes)
def forward(self, x):
x1 = self.inc(x)
x2 = self.down1(x1)
x3 = self.down2(x2)
x4 = self.down3(x3)
x5 = self.down4(x4)
x = self.up1(x5, x4)
x = self.up2(x, x3)
x = self.up3(x, x2)
x = self.up4(x, x1)
logits = self.outc(x)
return logits, x5 # 修改点
unet3 = UNet3(3,1)
c = torch.rand(1,1,224,224)
out_unet3, mid_out = unet3(b)
print(out_unet3.shape, mid_out.shape)更改resnet50的例子
import torchvision.models as models
net = models.resnet50()
print(net)
#修改特定层
from collections import OrderedDict
classifier = nn.Sequential(OrderedDict([('fc1', nn.Linear(2048, 128)),
('relu1', nn.ReLU()),
('dropout1',nn.Dropout(0.5)),
('fc2', nn.Linear(128, 10)),
('output', nn.Softmax(dim=1))
]))
net.fc = classifier
#添加外部输入
#这里对外部输入变量"add_variable"进行unsqueeze操作是为了和net输出的tensor保持维度一致
class Model(nn.Module):
def __init__(self, net):
super(Model, self).__init__()
self.net = net
self.relu = nn.ReLU()
self.dropout = nn.Dropout(0.5)
self.fc_add = nn.Linear(1001, 10, bias=True)
self.output = nn.Softmax(dim=1)
def forward(self, x, add_variable):
x = self.net(x)
x = torch.cat((self.dropout(self.relu(x)), add_variable.unsqueeze(1)),1)
x = self.fc_add(x)
x = self.output(x)
return x
#对我们修改好的模型结构进行实例化
import torchvision.models as models
net = models.resnet50()
model = Model(net).cuda()
outputs = model(inputs, add_var)
#添加额外输出
class Model(nn.Module):
def __init__(self, net):
super(Model, self).__init__()
self.net = net
self.relu = nn.ReLU()
self.dropout = nn.Dropout(0.5)
self.fc1 = nn.Linear(1000, 10, bias=True)
self.output = nn.Softmax(dim=1)
def forward(self, x, add_variable):
x1000 = self.net(x)
x10 = self.dropout(self.relu(x1000))
x10 = self.fc1(x10)
x10 = self.output(x10)
return x10, x1000
import torchvision.models as models
net = models.resnet50()
out10, out1000 = model(inputs, add_var)
model = Model(net).cuda()-
模型保存与读取
模型保存的格式有三种:pt,pth,pkl
一个PyTorch模型主要包含两个部分:模型结构和权重。其中模型是继承nn.Module的类,权重的数据结构是一个字典(key是层名,value是权重向量)。存储也由此分为两种形式:存储整个模型(包括结构和权重),和只存储模型权重。
# 保存整个模型
torch.save(model, save_dir)
# 保存模型权重
torch.save(model.state_dict, save_dir)
from torchvision import models
model = models.resnet152(pretrained=True)
# 保存整个模型
torch.save(model, save_dir)
# 保存模型权重
torch.save(model.state_dict, save_dir)
# PyTorch中将模型和数据放到GPU上有两种方式——.cuda()和.to(device),本节后续内容针对前一种方式进
# 行讨论。如果要使用多卡训练的话,需要对模型使用torch.nn.DataParallel。
os.environ['CUDA_VISIBLE_DEVICES'] = '0' # 如果是多卡改成类似0,1,2
model = model.cuda() # 单卡
model = torch.nn.DataParallel(model).cuda() # 多卡-
单卡保存+单卡加载
在使用os.envision命令指定使用的GPU后,即可进行模型保存和读取操作。注意这里即便保存和读取时使用的GPU不同也无妨。
import os
import torch
from torchvision import models
os.environ['CUDA_VISIBLE_DEVICES'] = '0' #这里替换成希望使用的GPU编号
model = models.resnet152(pretrained=True)
model.cuda()
# 保存+读取整个模型
torch.save(model, save_dir)
loaded_model = torch.load(save_dir)
loaded_model.cuda()
# 保存+读取模型权重
torch.save(model.state_dict(), save_dir)
loaded_dict = torch.load(save_dir)
loaded_model = models.resnet152() #注意这里需要对模型结构有定义
loaded_model.state_dict = loaded_dict
loaded_model.cuda()-
单卡保存+多卡加载
这种情况的处理比较简单,读取单卡保存的模型后,使用nn.DataParallel函数进行分布式训练设置即可
import os
import torch
from torchvision import models
os.environ['CUDA_VISIBLE_DEVICES'] = '0' #这里替换成希望使用的GPU编号
model = models.resnet152(pretrained=True)
model.cuda()
# 保存+读取整个模型
torch.save(model, save_dir)
os.environ['CUDA_VISIBLE_DEVICES'] = '1,2' #这里替换成希望使用的GPU编号
loaded_model = torch.load(save_dir)
loaded_model = nn.DataParallel(loaded_model).cuda()
# 保存+读取模型权重
torch.save(model.state_dict(), save_dir)
os.environ['CUDA_VISIBLE_DEVICES'] = '1,2' #这里替换成希望使用的GPU编号
loaded_dict = torch.load(save_dir)
loaded_model = models.resnet152() #注意这里需要对模型结构有定义
loaded_model.state_dict = loaded_dict
loaded_model = nn.DataParallel(loaded_model).cuda()-
多卡保存+单卡加载
这种情况下的核心问题是:如何去掉权重字典键名中的"module",以保证模型的统一性。
对于加载整个模型,直接提取模型的module属性即可:
import os
import torch
from torchvision import models
os.environ['CUDA_VISIBLE_DEVICES'] = '1,2' #这里替换成希望使用的GPU编号
model = models.resnet152(pretrained=True)
model = nn.DataParallel(model).cuda()
# 保存+读取整个模型
torch.save(model, save_dir)
os.environ['CUDA_VISIBLE_DEVICES'] = '0' #这里替换成希望使用的GPU编号
loaded_model = torch.load(save_dir)
loaded_model = loaded_model.moduleimport os
import torch
from torchvision import models
os.environ['CUDA_VISIBLE_DEVICES'] = '0,1,2' #这里替换成希望使用的GPU编号
model = models.resnet152(pretrained=True)
model = nn.DataParallel(model).cuda()
# 保存+读取模型权重
torch.save(model.state_dict(), save_dir)
os.environ['CUDA_VISIBLE_DEVICES'] = '0' #这里替换成希望使用的GPU编号
loaded_dict = torch.load(save_dir)
loaded_model = models.resnet152() #注意这里需要对模型结构有定义
loaded_model = nn.DataParallel(loaded_model).cuda()
loaded_model.state_dict = loaded_dict遍历字典去除module
from collections import OrderedDict
os.environ['CUDA_VISIBLE_DEVICES'] = '0' #这里替换成希望使用的GPU编号
loaded_dict = torch.load(save_dir)
new_state_dict = OrderedDict()
for k, v in loaded_dict.items():
name = k[7:] # module字段在最前面,从第7个字符开始就可以去掉module
new_state_dict[name] = v #新字典的key值对应的value一一对应
loaded_model = models.resnet152() #注意这里需要对模型结构有定义
loaded_model.state_dict = new_state_dict
loaded_model = loaded_model.cuda()-
多卡保存+多卡加载
由于是模型保存和加载都使用的是多卡,因此不存在模型层名前缀不同的问题。但多卡状态下存在一个device(使用的GPU)匹配的问题,即保存整个模型时会同时保存所使用的GPU id等信息,读取时若这些信息和当前使用的GPU信息不符则可能会报错或者程序不按预定状态运行。多卡模式下建议使用权重的方式存储和读取模型:
import os
import torch
from torchvision import models
os.environ['CUDA_VISIBLE_DEVICES'] = '0,1,2' #这里替换成希望使用的GPU编号
model = models.resnet152(pretrained=True)
model = nn.DataParallel(model).cuda()
# 保存+读取模型权重,强烈建议!!
torch.save(model.state_dict(), save_dir)
loaded_dict = torch.load(save_dir)
loaded_model = models.resnet152() #注意这里需要对模型结构有定义
loaded_model = nn.DataParallel(loaded_model).cuda()
loaded_model.state_dict = loaded_dict-
自定义损失函数
读取数据集,如果读入的是data和label都是图片的话,要在__init__函数中初始化data和label的地址,如果label是txt的话,就逐行读入。__len__则是数据的总行数。__getitem__是和迭代器有关的,要得到索引为index的data和label,Image.open()函数可能还要加convert('RGB'),防止RGBA格式的图片,另外PIL.Image.open()打开图片,然后用np.array转化成矩阵,是(H,W,C)维度,用plt.imshow()展示也是如此。打开图片之后,transpose中有reshape函数变成(C,H,W)
from torch.utils.data import Dataset, DataLoader
from torchvision import transforms
import torch.optim as optim
import matplotlib.pyplot as plt
import PIL
from sklearn.model_selection import train_test_split
os.environ['CUDA_VISIBLE_DEVICES'] = '2,3'
class CarvanaDataset(Dataset):
def __init__(self, base_dir, idx_list, mode="train", transform=None):
self.base_dir = base_dir
self.idx_list = idx_list
# os.listdir返回指定路径下的文件和文件夹列表。
self.images = os.listdir(base_dir+"train")
self.masks = os.listdir(base_dir+"train_masks")
self.mode = mode
self.transform = transform
def __len__(self):
return len(self.idx_list)
def __getitem__(self, index):
image_file = self.images[self.idx_list[index]]
mask_file = image_file[:-4]+"_mask.gif"
image = PIL.Image.open(os.path.join(base_dir, "train", image_file))
if self.mode=="train":
mask = PIL.Image.open(os.path.join(base_dir, "train_masks", mask_file))
if self.transform is not None:
image = self.transform(image)
mask = self.transform(mask)
mask[mask!=0] = 1.0
return image, mask.float()
else:
if self.transform is not None:
image = self.transform(image)
return image
base_dir = "./"
transform = transforms.Compose([transforms.Resize((256,256)), transforms.ToTensor()])
train_idxs, val_idxs = train_test_split(range(len(os.listdir(base_dir+"train_masks"))), test_size=0.3)
train_data = CarvanaDataset(base_dir, train_idxs, transform=transform)
val_data = CarvanaDataset(base_dir, val_idxs, transform=transform)
train_loader = DataLoader(train_data, batch_size=32, num_workers=4, shuffle=True)
val_loader = DataLoader(train_data, batch_size=32, num_workers=4, shuffle=False)image, mask = next(iter(train_loader))
plt.subplot(121)
plt.imshow(image[0,0])
plt.subplot(122)
plt.imshow(mask[0,0], cmap="gray")# 使用Binary Cross Entropy Loss,之后我们会尝试替换为自定义的loss
criterion = nn.BCEWithLogitsLoss()
optimizer = optim.Adam(unet.parameters(), lr=1e-3, weight_decay=1e-8)
unet = nn.DataParallel(unet).cuda()def dice_coeff(pred, target):
eps = 0.0001
num = pred.size(0)
m1 = pred.view(num, -1) # Flatten
m2 = target.view(num, -1) # Flatten
intersection = (m1 * m2).sum()
return (2. * intersection + eps) / (m1.sum() + m2.sum() + eps)
def train(epoch):
unet.train()
train_loss = 0
for data, mask in train_loader:
data, mask = data.cuda(), mask.cuda()
optimizer.zero_grad()
output = unet(data)
loss = criterion(output,mask)
loss.backward()
optimizer.step()
train_loss += loss.item()*data.size(0)
train_loss = train_loss/len(train_loader.dataset)
print('Epoch: {} \tTraining Loss: {:.6f}'.format(epoch, train_loss))
def val(epoch):
print("current learning rate: ", optimizer.state_dict()["param_groups"][0]["lr"])
unet.eval()
val_loss = 0
dice_score = 0
with torch.no_grad():
for data, mask in val_loader:
data, mask = data.cuda(), mask.cuda()
output = unet(data)
loss = criterion(output, mask)
val_loss += loss.item()*data.size(0)
dice_score += dice_coeff(torch.sigmoid(output).cpu(), mask.cpu())*data.size(0)
val_loss = val_loss/len(val_loader.dataset)
dice_score = dice_score/len(val_loader.dataset)
print('Epoch: {} \tValidation Loss: {:.6f}, Dice score: {:.6f}'.format(epoch, val_loss, dice_score))epochs = 100
for epoch in range(1, epochs+1):
train(epoch)
val(epoch)!nvidia-smi
自定义损失函数
如果我们不想使用交叉熵函数,而是想针对分割模型常用的Dice系数设计专门的loss,即DiceLoss,这时就需要我们自定义PyTorch的损失函数
class DiceLoss(nn.Module):
def __init__(self, weight=None, size_average=True):
super(DiceLoss, self).__init__()
def forward(self,inputs,targets,smooth=1):
inputs = torch.sigmoid(inputs)
inputs = inputs.view(-1)
targets = targets.view(-1)
intersection = (inputs * targets).sum()
dice = (2.*intersection + smooth)/(inputs.sum() + targets.sum() + smooth)
return 1 - dice迭代一张图片,计算自定义的损失
newcriterion = DiceLoss()
unet.eval()
image, mask = next(iter(val_loader))
out_unet = unet(image.cuda())
loss = newcriterion(out_unet, mask.cuda())
print(loss)-
动态调整学习率
随着优化的进行,固定的学习率可能无法满足优化的需求,这时需要调整学习率,降低优化的速度。PyTorch自带的StepLR scheduler可以动态调整学习率。step_size=1, gamma=0.8的意思是每一个Epoch都会变成原来学习率的0.8倍。
-
lr_scheduler.LambdaLR
-
lr_scheduler.MultiplicativeLR
-
lr_scheduler.StepLR
-
lr_scheduler.MultiStepLR
-
lr_scheduler.ExponentialLR
-
lr_scheduler.CosineAnnealingLR
-
lr_scheduler.ReduceLROnPlateau
-
lr_scheduler.CyclicLR
-
lr_scheduler.OneCycleLR
-
lr_scheduler.CosineAnnealingWarmRestarts
scheduler = optim.lr_scheduler.StepLR(optimizer, step_size=1, gamma=0.8)
epochs = 100
for epoch in range(1, epochs+1):
train(epoch)
val(epoch)
scheduler.step()
#自定义scheduler
def adjust_learning_rate(optimizer, epoch):
lr = args.lr * (0.1 ** (epoch // 30))
for param_group in optimizer.param_groups:
param_group['lr'] = lr
optimizer = torch.optim.SGD(model.parameters(),lr = args.lr,momentum = 0.9)
for epoch in range(10):
train(...)
validate(...)
adjust_learning_rate(optimizer,epoch)-
模型微调
使用已有的网络结构
- 实例化网络
import torchvision.models as models
resnet18 = models.resnet18()
# resnet18 = models.resnet18(pretrained=False) 等价于与上面的表达式
alexnet = models.alexnet()
vgg16 = models.vgg16()
squeezenet = models.squeezenet1_0()
densenet = models.densenet161()
inception = models.inception_v3()
googlenet = models.googlenet()
shufflenet = models.shufflenet_v2_x1_0()
mobilenet_v2 = models.mobilenet_v2()
mobilenet_v3_large = models.mobilenet_v3_large()
mobilenet_v3_small = models.mobilenet_v3_small()
resnext50_32x4d = models.resnext50_32x4d()
wide_resnet50_2 = models.wide_resnet50_2()
mnasnet = models.mnasnet1_0()-
传递
pretrained参数
通过True或者False来决定是否使用预训练好的权重,在默认状态下pretrained = False,意味着我们不使用预训练得到的权重,当pretrained = True,意味着我们将使用在一些数据集上预训练得到的权重。
import torchvision.models as models
resnet18 = models.resnet18(pretrained=True)
alexnet = models.alexnet(pretrained=True)
squeezenet = models.squeezenet1_0(pretrained=True)
vgg16 = models.vgg16(pretrained=True)
densenet = models.densenet161(pretrained=True)
inception = models.inception_v3(pretrained=True)
googlenet = models.googlenet(pretrained=True)
shufflenet = models.shufflenet_v2_x1_0(pretrained=True)
mobilenet_v2 = models.mobilenet_v2(pretrained=True)
mobilenet_v3_large = models.mobilenet_v3_large(pretrained=True)
mobilenet_v3_small = models.mobilenet_v3_small(pretrained=True)
resnext50_32x4d = models.resnext50_32x4d(pretrained=True)
wide_resnet50_2 = models.wide_resnet50_2(pretrained=True)
mnasnet = models.mnasnet1_0(pretrained=True)
注意事项:
-
通常PyTorch模型的扩展为
.pt或.pth,程序运行时会首先检查默认路径中是否有已经下载的模型权重,一旦权重被下载,下次加载就不需要下载了。 -
一般情况下预训练模型的下载会比较慢,我们可以直接通过迅雷或者其他方式去 这里 查看自己的模型里面
model_urls,然后手动下载,预训练模型的权重在Linux和Mac的默认下载路径是用户根目录下的.cache文件夹。在Windows下就是C:\Users\。我们可以通过使用 torch.utils.model_zoo.load_url()设置权重的下载地址。\.cache\torch\hub\checkpoint -
如果觉得麻烦,还可以将自己的权重下载下来放到同文件夹下,然后再将参数加载网络。
self.model = models.resnet50(pretrained=False)
self.model.load_state_dict(torch.load('./model/resnet50-19c8e357.pth')) 通过设置requires_grad = False来冻结部分层。
def set_parameter_requires_grad(model, feature_extracting):
if feature_extracting:
for param in model.parameters():
param.requires_grad = Falseimport torchvision.models as models
# 冻结参数的梯度
feature_extract = True
model = models.resnet18(pretrained=True)
set_parameter_requires_grad(model, feature_extract)
# 修改模型
num_ftrs = model.fc.in_features
model.fc = nn.Linear(in_features=num_ftrs, out_features=4, bias=True) 除了使用torchvision.models进行预训练以外,还有一个常见的预训练模型库,叫做timm,timm提供的预训练模型已经达到了592个
import timm
avail_pretrained_models = timm.list_models(pretrained=True)
len(avail_pretrained_models)
#模糊搜索,如此会返回densenet系列的所有模型
all_densnet_models = timm.list_models("*densenet*")
all_densnet_models
#查看下模型的具体参数
model = timm.create_model('resnet34',num_classes=10,pretrained=True)
model.default_cfg
#使用
import timm
import torch
model = timm.create_model('resnet34',pretrained=True)
x = torch.randn(1,3,224,224)
output = model(x)
output.shape
#查看某一层模型参数(以第一层卷积为例)
model = timm.create_model('resnet34',pretrained=True)
list(dict(model.named_children())['conv1'].parameters())
#修改模型(将1000类改为10类输出)
model = timm.create_model('resnet34',num_classes=10,pretrained=True)
x = torch.randn(1,3,224,224)
output = model(x)
output.shape
#改变输入通道数(比如我们传入的图片是单通道的,但是模型需要的是三通道图片)
#我们可以通过添加in_chans=1来改变
model = timm.create_model('resnet34',num_classes=10,pretrained=True,in_chans=1)
x = torch.randn(1,1,224,224)
output = model(x)
#模型保存
torch.save(model.state_dict(),'./checkpoint/timm_model.pth')
model.load_state_dict(torch.load('./checkpoint/timm_model.pth'))
-
半精度训练
PyTorch默认的浮点数存储方式用的是torch.float32,但绝大多数场景其实并不需要这么精确,只保留一半的信息也不会影响结果,也就是使用torch.float16格式。由于数位减了一半,因此被称为“半精度”。
在PyTorch中使用autocast配置半精度训练,同时需要在下面三处加以设置:
from torch.cuda.amp import autocast
#在模型定义的forward前面加上修饰器
@autocast()
def forward(self, x):
...
return x
在训练过程中,只需在将数据输入模型及其之后的部分放入“with autocast():“即可:
for x in train_loader:
x = x.cuda()
with autocast():
output = model(x)
...-
数据增强
imgaug是计算机视觉任务中常用的一个数据增强的包,相比于torchvision.transforms,它提供了更多的数据增强方法,因此在各种竞赛中,人们广泛使用imgaug来对数据进行增强操作。
imgaug仅仅提供了图像增强的一些方法,但是并未提供图像的IO操作,因此我们需要使用一些库来对图像进行导入,建议使用imageio进行读入,如果使用的是opencv进行文件读取的时候,需要进行手动改变通道,将读取的BGR图像转换为RGB图像。除此以外,当我们用PIL.Image进行读取时,因为读取的图片没有shape的属性,所以我们需要将读取到的img转换为np.array()的形式再进行处理。
import imageio
import imgaug as ia
%matplotlib inline
# 图片的读取
img = imageio.imread("./Lenna.jpg")
# 使用Image进行读取
# img = Image.open("./Lenna.jpg")
# image = np.array(img)
# ia.imshow(image)
# 可视化图片
ia.imshow(img) 现在我们已经得到了需要处理的图片,imgaug包含了许多从Augmenter继承的数据增强的操作。在这里我们以Affine为例子。
from imgaug import augmenters as iaa
# 设置随机数种子
ia.seed(4)
# 实例化方法
rotate = iaa.Affine(rotate=(-4,45))
img_aug = rotate(image=img)
ia.imshow(img_aug) 我们就需要利用imgaug.augmenters.Sequential()来构造我们数据增强的pipline,该方法与torchvison.transforms.Compose()相类似。
iaa.Sequential(children=None, # Augmenter集合
random_order=False, # 是否对每个batch使用不同顺序的Augmenter list
name=None,
deterministic=False,
random_state=None)
# 构建处理序列
aug_seq = iaa.Sequential([
iaa.Affine(rotate=(-25,25)),
iaa.AdditiveGaussianNoise(scale=(10,60)),
iaa.Crop(percent=(0,0.2))
])
# 对图片进行处理,image不可以省略,也不能写成images
image_aug = aug_seq(image=img)
ia.imshow(image_aug)对批次图片进行处理
在实际使用中,我们通常需要处理更多份的图像数据。此时,可以将图形数据按照NHWC的形式或者由列表组成的HWC的形式对批量的图像进行处理。主要分为以下两部分,对批次的图片以同一种方式处理和对批次的图片进行分部分处理。
images = [img,img,img,img,]
images_aug = rotate(images=images)
ia.imshow(np.hstack(images_aug))
aug_seq = iaa.Sequential([
iaa.Affine(rotate=(-25, 25)),
iaa.AdditiveGaussianNoise(scale=(10, 60)),
iaa.Crop(percent=(0, 0.2))
])
# 传入时需要指明是images参数
images_aug = aug_seq.augment_images(images = images)
#images_aug = aug_seq(images = images)
ia.imshow(np.hstack(images_aug))
#可以通过imgaug.augmenters.Sometimes()对batch中的一部分图片应用一部分Augmenters,
#剩下的图片应用另外的Augmenters。
iaa.Sometimes(p=0.5, # 代表划分比例
then_list=None, # Augmenter集合。p概率的图片进行变换的Augmenters。
else_list=None, #1-p概率的图片会被进行变换的Augmenters。注意变换的图片应用的Augmenter只能是then_list或者else_list中的一个。
name=None,
deterministic=False,
random_state=None)
#对不同大小的图片进行处理
# 构建pipline
seq = iaa.Sequential([
iaa.CropAndPad(percent=(-0.2, 0.2), pad_mode="edge"), # crop and pad images
iaa.AddToHueAndSaturation((-60, 60)), # change their color
iaa.ElasticTransformation(alpha=90, sigma=9), # water-like effect
iaa.Cutout() # replace one squared area within the image by a constant intensity value
], random_order=True)
# 加载不同大小的图片
images_different_sizes = [
imageio.imread("https://upload.wikimedia.org/wikipedia/commons/e/ed/BRACHYLAGUS_IDAHOENSIS.jpg"),
imageio.imread("https://upload.wikimedia.org/wikipedia/commons/c/c9/Southern_swamp_rabbit_baby.jpg"),
imageio.imread("https://upload.wikimedia.org/wikipedia/commons/9/9f/Lower_Keys_marsh_rabbit.jpg")
]
# 对图片进行增强
images_aug = seq(images=images_different_sizes)
# 可视化结果
print("Image 0 (input shape: %s, output shape: %s)" % (images_different_sizes[0].shape, images_aug[0].shape))
ia.imshow(np.hstack([images_different_sizes[0], images_aug[0]]))
print("Image 1 (input shape: %s, output shape: %s)" % (images_different_sizes[1].shape, images_aug[1].shape))
ia.imshow(np.hstack([images_different_sizes[1], images_aug[1]]))
print("Image 2 (input shape: %s, output shape: %s)" % (images_different_sizes[2].shape, images_aug[2].shape))
ia.imshow(np.hstack([images_different_sizes[2], images_aug[2]]))imgaug在PyTorch的应用
import numpy as np
from imgaug import augmenters as iaa
from torch.utils.data import DataLoader, Dataset
from torchvision import transforms
# 构建pipline
tfs = transforms.Compose([
iaa.Sequential([
iaa.flip.Fliplr(p=0.5),
iaa.flip.Flipud(p=0.5),
iaa.GaussianBlur(sigma=(0.0, 0.1)),
iaa.MultiplyBrightness(mul=(0.65, 1.35)),
]).augment_image,
# 不要忘记了使用ToTensor()
transforms.ToTensor()
])
# 自定义数据集
class CustomDataset(Dataset):
def __init__(self, n_images, n_classes, transform=None):
# 图片的读取,建议使用imageio
self.images = np.random.randint(0, 255,
(n_images, 224, 224, 3),
dtype=np.uint8)
self.targets = np.random.randn(n_images, n_classes)
self.transform = transform
def __getitem__(self, item):
image = self.images[item]
target = self.targets[item]
if self.transform:
image = self.transform(image)
return image, target
def __len__(self):
return len(self.images)
def worker_init_fn(worker_id):
imgaug.seed(np.random.get_state()[1][0] + worker_id)
custom_ds = CustomDataset(n_images=50, n_classes=10, transform=tfs)
custom_dl = DataLoader(custom_ds, batch_size=64,
num_workers=4, pin_memory=True,
worker_init_fn=worker_init_fn)
-
使用argparse进行调参
总的来说,我们可以将argparse的使用归纳为以下三个步骤。
-
创建
ArgumentParser()对象 -
调用
add_argument()方法添加参数 -
使用
parse_args()解析参数 在接下来的内容中,我们将以实际操作来学习argparse的使用方法。
import argparse
def get_options(parser=argparse.ArgumentParser()):
parser.add_argument('--workers', type=int, default=0,
help='number of data loading workers, you had better put it '
'4 times of your gpu')
parser.add_argument('--batch_size', type=int, default=4, help='input batch size, default=64')
parser.add_argument('--niter', type=int, default=10, help='number of epochs to train for, default=10')
parser.add_argument('--lr', type=float, default=3e-5, help='select the learning rate, default=1e-3')
parser.add_argument('--seed', type=int, default=118, help="random seed")
parser.add_argument('--cuda', action='store_true', default=True, help='enables cuda')
parser.add_argument('--checkpoint_path',type=str,default='',
help='Path to load a previous trained model if not empty (default empty)')
parser.add_argument('--output',action='store_true',default=True,help="shows output")
opt = parser.parse_args()
if opt.output:
print(f'num_workers: {opt.workers}')
print(f'batch_size: {opt.batch_size}')
print(f'epochs (niters) : {opt.niter}')
print(f'learning rate : {opt.lr}')
print(f'manual_seed: {opt.seed}')
print(f'cuda enable: {opt.cuda}')
print(f'checkpoint_path: {opt.checkpoint_path}')
return opt
if __name__ == '__main__':
opt = get_options()
# 导入必要库
...
import config
opt = config.get_options()
manual_seed = opt.seed
num_workers = opt.workers
batch_size = opt.batch_size
lr = opt.lr
niters = opt.niters
checkpoint_path = opt.checkpoint_path
# 随机数的设置,保证复现结果
def set_seed(seed):
torch.manual_seed(seed)
torch.cuda.manual_seed_all(seed)
random.seed(seed)
np.random.seed(seed)
torch.backends.cudnn.benchmark = False
torch.backends.cudnn.deterministic = True
...
if __name__ == '__main__':
set_seed(manual_seed)
for epoch in range(niters):
train(model,lr,batch_size,num_workers,checkpoint_path)
val(model,lr,batch_size,num_workers,checkpoint_path)