自动驾驶专题介绍 ———— 动力传动系统
文章目录
- 动力传动系统
-
- 传统动力传动系统
- 混合动力传动系统
- 串联型
- 并联型
- 串并联型
- 纯电动传动系统
- 电机中央驱动
- 电动轮驱动
动力传动系统
汽车动力传动系统是位于发动机和驱动车轮之间的动力传动装置,其基本功用是将发动机发出的动力传输给驱动车轮,以保障汽车在各种行驶条件下正常行驶所需的驱动力,并使汽车具有良好的动力性和经济性。汽车动力传动系统可以根据汽车动力源的不同分为传统动力传动系统、混合动力传动系统和纯电动传动系统。
传统动力传动系统
传统动力传动系统的组成在其汽车上的布置形式,取决于发动机的形式和性能、汽车总体结构形式、汽车行驶系统等许多因素。为满足不同的汽车使用要求,可以将传统动力传动系统划分为:
1. 发动机前置后轮驱动(Front Engine Rear Drive)
2. 发动机前置前轮驱动(Front Engine Front Drive)
3. 发动机后置后轮驱动(Rear Engine Rear Drive)
4. 发动机中置后轮驱动(Middle Engine Rear Drive)
5. 四轮驱动(4 Wheel Drive)
下面通过典型的前置后驱方案来介绍传统动力传动系统的动力传动路线和组成。
1. 离合器
离合器的主要功用如下:
1. 保证汽车平稳起步
2. 保证传动系统换档时工作平顺
3. 限制传动系统所承受的最大转矩,防止传动系统过载。
2. 变速器
由于传统汽车采用内燃机作为动力源,转矩和转速变化范围较小,且内燃机无法反向旋转,不能满足复杂工况的使用需求,因此在传动系统中设置了变速器,具体的功用如下:
1. 改变传动比,扩大驱动轮转矩和转速的变化范围,以适应经常变化的行驶条件
2. 实现汽车倒退行驶
3. 利用空档,中断动力传递,以使发动机能够启动、怠速,并便于变速器换档或进行动力输出。
3. 万向节
在前置后驱车辆上,万向节传动装置安装在变速器输出轴和驱动桥主减速器输入轴之间;而在前置前驱车辆上,省略了传动轴,万向节安装在既负责驱动有负责转向的前桥半轴与车轮之间。汽车运行中路面不平产生跳动,负荷变化或两个总成安装位置差异,都会使变速器输出轴与驱动桥主减速器输入轴之间的夹角和距离发生变化,为了解决这个问题自然而然就产生了万向节。它允许被连接的零件之间的夹角变化,但仅允许在一定范围内变化。单子万向节不能使输出轴和输入轴的瞬时角速度相等,容易造成振动,加剧机件的损坏,造成很大的噪音。因此,后驱动汽车的万向节传动形式都采用双万向节,就是传动轴两端各一个万向节,其作用是使传动轴两端的夹角相等,保证输出轴与输入轴的瞬时角速度始终相等。
4.传动轴
传动轴是万向传动装置传动轴中能传递动力的轴。它是一个转速高、支撑少的旋转体,所以它的动平衡非常重要。大部分传动轴出厂前基本都需要做好动平衡测试,并且已经在平衡机上进行了调整。汽车传动轴由轴管、伸缩套和万向节组成。伸缩套可以自动调节变速箱与驱动桥之间距离的变化。万向节保证了变速箱输出轴与驱动桥输入轴夹角的变化,实现了两轴的恒角速度传动。大多数万向节十字轴、十字轴承和法兰叉等。轴承的端面上装有蝶形弹簧,用于压紧滚轮。横轴端面增加了带螺旋槽的强化尼龙垫片,在传递大夹角或大扭矩的动力时,可以避免烧结。
5. 驱动桥
驱动桥位于汽车传动系统的末端,其功用主要如下:
1. 将转矩传动驱动轮,并降低转速,增大转矩。
2. 改变转矩传递方向。
3. 通过差速作用,保证内、外侧车轮以不同转速转向。
驱动桥的类型有断开式驱动桥和非断开式驱动桥两种。断开式驱动桥通常与独立悬架配用,非断开式驱动桥与非独立悬架配用。
5.1 主减速器
主减速器的功用是将输入的转矩增大并相应降低转速,以及当发动机纵置时还具有改变转矩旋转方向的作用。主减速器的结构形式各样,按齿轮副结构形式分,有圆柱齿轮式、锥齿轮式和准双曲面齿轮式;按照参加减速传动的齿轮副数目可分为单级式主减速器和双级式主减速器。
5.2 差速器
当汽车转弯行驶时,外侧车轮移动的距离大于内侧车轮。若两侧车轮都固定在同一刚性转轴上,两轮角速度相等,则此时外轮必然是边滚动边滑移,内轮必然是边滚动边滑转。因此须在驱动桥中设置差速器。差速器的功用是当汽车转弯行驶或在不平路面上行驶时,使左右驱动车轮以不同的角速度滚动,以保证两侧驱动轮与地面间做纯滚动运动。
由于传统差速器有着转矩平均分配给两侧车轮的特性,因此即使一侧车轮与路面之间的附着力很小,也能获得较大的转矩,此侧车轮会原地滑转,致使总的驱动力不足以克服行驶阻力。为了提高汽车在路况差的路面上的通过能力,也可以采用防滑差速器。防滑差速器可在一侧驱动轮打滑空转的同时,将大部分或全部转矩传递给不打滑的驱动轮,以利用这一驱动轮的附着力产生较大的驱动力矩使汽车行驶。常用的防滑差速器有以下几类:
1. 强制锁止式:在对称式锥齿轮差速器上设置差速锁。当一侧驱动轮滑转时,可利用差速锁使差速器不起差速作用。
2. 高摩擦自锁式:利用差速器内机构的摩擦力矩实现自锁。
3. 托森式:利用蜗杆传动的不可逆性原理和齿面高摩擦条件,使差速器根据其内部差动转矩大小而自动锁死或松开。
4. 黏性联轴式:内部密封空间注满高黏度硅油,主从动部分靠硅油的黏性来传递转矩。主从动轴出现转速差时,硅油产生极大的黏性阻力,阻止内外板间相对运动,即可自动锁死。
5.3 半轴
半轴是在差速器和驱动轮之间传递动力的实心轴,现代汽车基本上采用全浮式半轴支承和半浮式半轴支承。驱动桥壳是安装主减速器、差速器、半轴、车轮的装配基体,从结构上可分为整体式桥壳和分段式桥壳两类,其功用是:
1. 支承并保护主减速器、差速器和半轴等。
2. 使左、右驱动轮的轴向相对位置固定。
3. 与从东桥一起支承车架及其上各总成的质量。
4. 承受由车轮传来的路面反作用力和力矩,并经悬架传给车架。
混合动力传动系统
混合动力汽车是指装有内燃机和电动机两种动力的汽车,它综合了传统内燃机和电动机的优点,具有续航里程长、燃油消耗和排放量低的优点。按照内燃机与电动机连接方式的不同,混合动力汽车的传动系统可以分为串联型、并联型和串并联型三种。
串联型
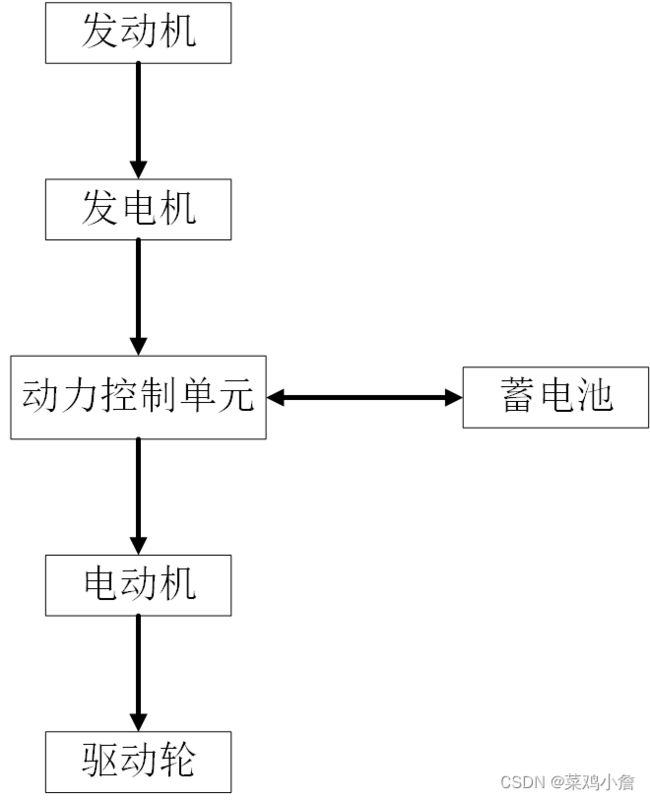
串联型混合动力汽车靠内燃机带动发电机发电,发出的电供给电动机来驱动车辆行驶。若有剩余,则对蓄电池充电。在需要大功率输出是,发电机和蓄电池同时向电动机供电。
并联型
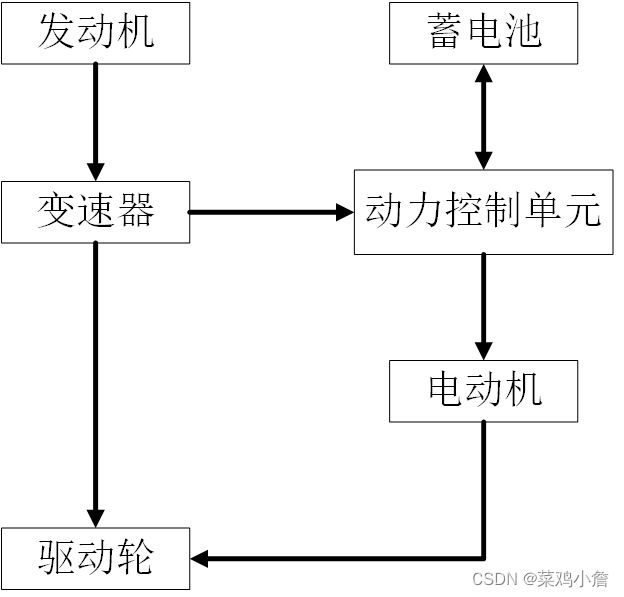
并联型混合动力汽车采用内燃机和电动机两套各自独立的驱动系统。内燃机和电动机均可以单独驱动车辆,也可以联合驱动车辆。当内燃机的输出功率大于驱动车辆所需要的功率或者再生制动时,电机工作在发电机状态,将多余的能量转化为电能充入蓄电池。
为了充分发挥并联式混合动力系统的优势,汽车应根据不同的工况采用各不同的工作模式,具体的情况如下:
1. 纯电动工况。此时并联式混合动力处于低速、轻载等工况且电池的剩余电量比较充足。
2. 纯发动机工况。此时并联式混合动力汽车高速行驶且中等负荷时,车辆克服行车阻力所需的动力并不是很大且电池剩余电量并不是很低。
3. 混合驱动模式。此时汽车工作在急加速或爬坡等大负荷的情况下,当车辆所需的动力超过发动机工作能力或不在发动机高效区是,这时驱动电机以电动机形式工作队发动机进行助力。
4. 行车充电模式。在车辆正常行驶且中低负荷时,若电池的剩余电量较低,发动机除了需要提供驱动动力之外,还需要提供额外的功率对电池充电。
5. 再生制动模式。当汽车处于减速/制动时,电机在保证制动安全的前提条件下尽可能多地回收再生制动能量,剩余的能量由机械制动系统消耗掉。
串并联型
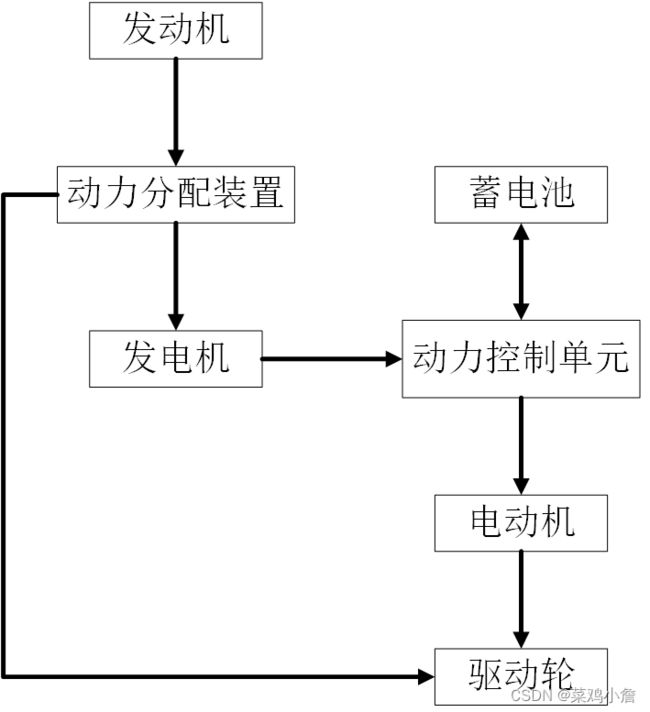
串并联行混合动力汽车结合了串联和并联两种形式。发动机发出的功率一部分通过机械传动输送给驱动桥,另一部分供给发电机发电。发电机发出的点嗯那个输出给电动机或电池,电动机产生的驱动力矩通过动力合成装置传递给驱动桥。当汽车运行在低转速范围内时,可以仅依靠低速大转矩的电动机驱动汽车,而当汽车以更高的速度运行时,可以由高效率的发动机来驱动。
纯电动传动系统
纯电动汽车是指以蓄电池或燃料电池作为驱动动力,使用电动机驱动的汽车。与内燃机汽车相比,纯电动汽车存在以下特点:
1. 无污染,噪声低。
2. 能源效率高。
3. 结构简单,维修方便。
纯电动汽车由电力驱动系统、电源系统和辅助系统三部分组成。其驱动和传动布置大致可以分为电动机中央驱动和电动轮驱动两种。

电机中央驱动
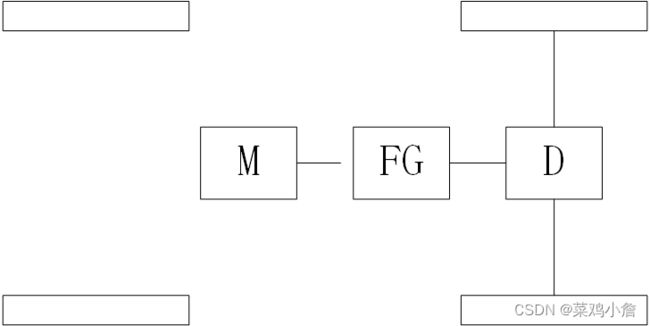
第一种类型如第一个图所示。它是从发动机前置前轮驱动演变而来,保留了内燃机汽车的传动系统,只是把内燃机替换成了电动机。该结构可以提供纯电汽车的启动转矩以及低速的后备功率,对驱动电机要求不高。
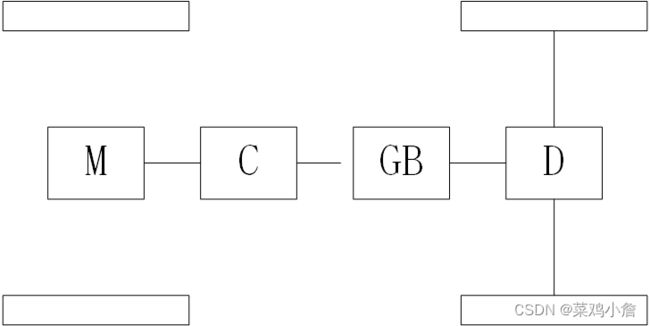
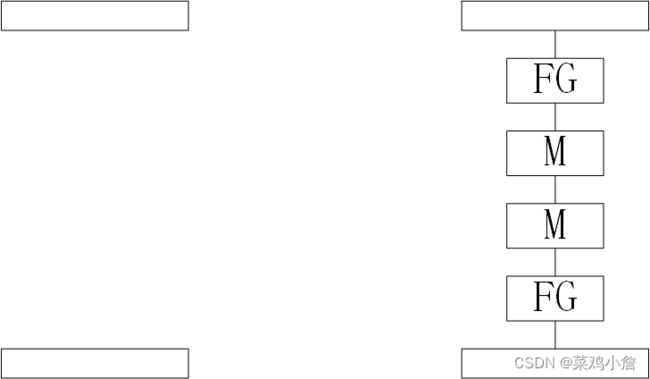
第二种类型如第二个图所示。该结构最大二特点是不存在离合器和变速器,而是采用固定速比减速器,通过电动机的控制实现变速功能。该结构的优点是机械传动装置的质量轻、体积小。相比于第一种类型,该结构对于电动机的要求较高,不仅要求启动转矩高,还要求较大的后备功率,这样才能保证汽车在各种工况的动力性能。
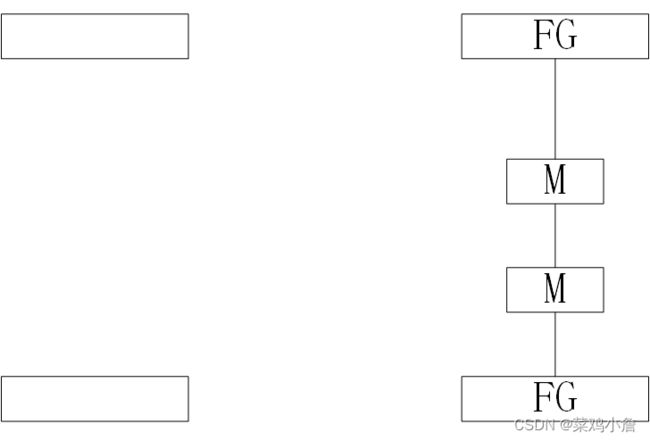
第三种类型如第三个图所示。这种结构跟发动机横置、前轮驱动的内燃机汽车布置方式类似。它把电动机、固定速比减速器和差速器集合成一个整体,两根半轴连接驱动车轮,这种结构在小型汽车上普遍运用。
电动轮驱动
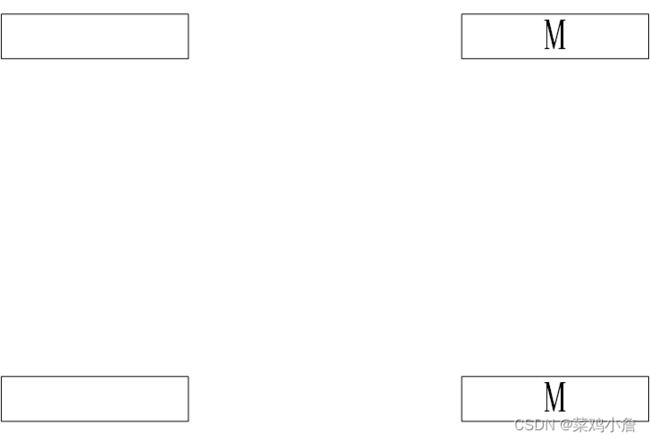
第一种类型如上面第一张图所示。该结构采用了两个电动机,通过固定速比的减速器分别驱动两个车轮。这使得每个电机的转速是可以独立调节的。当汽车转向时,由电子控制系统实现电子差速。从这个角度俩看,电动机的控制系统较为复杂。
第二种类型如上面第二张图所示。它将电动机和固定速比减速器安装在车轮里,不存在传动轴和差速器,从而一定程度上简化了传动系统。但这样会使得电动轮驱动方式需要多个电动机,电动机的控制电路十分复杂。
第三种类型如上面第三张图所示。它采用低速外转子电动机,去掉了减速齿轮,将电动机的外转子直接安装在车轮的轮毂上,又称为轮毂电机。这种结构的电动机与驱动轮之间无机械传动装置,无机械传动损失,空间利用率高。但是由于是直接驱动车轮的方式对电动机的性能要求最高,要求其必须具备较高的启动转矩和较大的后备功率。