UNet的Pytorch实现
UNet的pytorch实现
原文
本文实现
训练过的UNet参数文件
提取码:1zom
1.概述
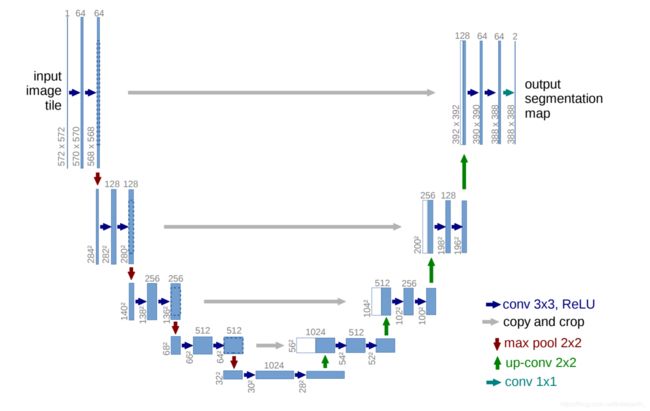
UNet是医学图像分割领域经典的论文,因其结构像字母U得名。
倘若了解过Encoder-Decoder结构、实现过DenseNet,那么实现Unet并非难事。
1.首先,图中的灰色箭头(copy and crop)目的是将浅层特征与深层特征融合,这样可以既保留浅层特征图中较高精度的特征信息,也可以利用深层特征图中抽象的语义信息。
2.其次,在下采样过程中,特征图缩小的尺度是上一层的一半;而在上采样过程中特征图变为上一层的一倍。通道数量变化相反。
3.下采样的时候卷积层特征尺度变化小,原论文使用max pooling进行尺度缩小;上采样也一样,使用upsampling+conv进行尺度增大。
对于下采样过程,可以让卷积不对特征图进行尺度变化,只让max pooling进行尺度变换,上采样也是。
不过本文的实现和原论文一些不同:
- 考虑到max pooling会丢失位置信息,决定使用卷积代替它;
- 使用转置卷积替代简单的上采样(插值),这样既能实现同样的效果,也能加深网络。
2.实现细节
2.1下采样过程
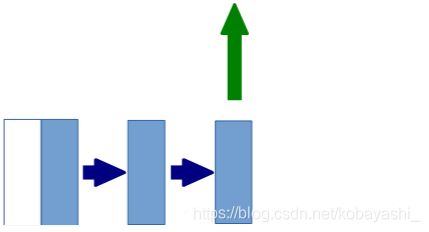
对于整个下采样过程,可以看作由如下的结构组成(conv-conv-down)。不过在进行第二次卷积时,它的输出有两个方向,一个是给下采样层,一个是传入深层。

class DownsampleLayer(nn.Module):
def __init__(self,in_ch,out_ch):
super(DownsampleLayer, self).__init__()
self.Conv_BN_ReLU_2=nn.Sequential(
nn.Conv2d(in_channels=in_ch,out_channels=out_ch,kernel_size=3,stride=1,padding=1),
nn.BatchNorm2d(out_ch),
nn.ReLU(),
nn.Conv2d(in_channels=out_ch, out_channels=out_ch, kernel_size=3, stride=1,padding=1),
nn.BatchNorm2d(out_ch),
nn.ReLU()
)
self.downsample=nn.Sequential(
nn.Conv2d(in_channels=out_ch,out_channels=out_ch,kernel_size=3,stride=2,padding=1),
nn.BatchNorm2d(out_ch),
nn.ReLU()
)
def forward(self,x):
"""
:param x:
:return: out输出到深层,out_2输入到下一层,
"""
out=self.Conv_BN_ReLU_2(x)
out_2=self.downsample(out)
return out,out_2
2.2上采样过程
上采样过程和下采样过程一样,不过输出通道是浅层和上一层的叠加,卷积过程输出通道是上采样层的2倍。
class UpSampleLayer(nn.Module):
def __init__(self,in_ch,out_ch):
# 512-1024-512
# 1024-512-256
# 512-256-128
# 256-128-64
super(UpSampleLayer, self).__init__()
self.Conv_BN_ReLU_2 = nn.Sequential(
nn.Conv2d(in_channels=in_ch, out_channels=out_ch*2, kernel_size=3, stride=1,padding=1),
nn.BatchNorm2d(out_ch*2),
nn.ReLU(),
nn.Conv2d(in_channels=out_ch*2, out_channels=out_ch*2, kernel_size=3, stride=1,padding=1),
nn.BatchNorm2d(out_ch*2),
nn.ReLU()
)
self.upsample=nn.Sequential(
nn.ConvTranspose2d(in_channels=out_ch*2,out_channels=out_ch,kernel_size=3,stride=2,padding=1,output_padding=1),
nn.BatchNorm2d(out_ch),
nn.ReLU()
)
def forward(self,x,out):
'''
:param x: 输入卷积层
:param out:与上采样层进行cat
:return:
'''
x_out=self.Conv_BN_ReLU_2(x)
x_out=self.upsample(x_out)
cat_out=torch.cat((x_out,out),dim=1)
return cat_out
2.3定义UNet
除了最后conv-conv-conv过程外,其他的步骤都已经在上面定义好了。于是,UNet定义为了下面的样子。
class UNet(nn.Module):
def __init__(self):
super(UNet, self).__init__()
out_channels=[2**(i+6) for i in range(5)] #[64, 128, 256, 512, 1024]
#下采样
self.d1=DownsampleLayer(3,out_channels[0])#3-64
self.d2=DownsampleLayer(out_channels[0],out_channels[1])#64-128
self.d3=DownsampleLayer(out_channels[1],out_channels[2])#128-256
self.d4=DownsampleLayer(out_channels[2],out_channels[3])#256-512
#上采样
self.u1=UpSampleLayer(out_channels[3],out_channels[3])#512-1024-512
self.u2=UpSampleLayer(out_channels[4],out_channels[2])#1024-512-256
self.u3=UpSampleLayer(out_channels[3],out_channels[1])#512-256-128
self.u4=UpSampleLayer(out_channels[2],out_channels[0])#256-128-64
#输出
self.o=nn.Sequential(
nn.Conv2d(out_channels[1],out_channels[0],kernel_size=3,stride=1,padding=1),
nn.BatchNorm2d(out_channels[0]),
nn.ReLU(),
nn.Conv2d(out_channels[0], out_channels[0], kernel_size=3, stride=1, padding=1),
nn.BatchNorm2d(out_channels[0]),
nn.ReLU(),
nn.Conv2d(out_channels[0],3,3,1,1),
nn.Sigmoid(),
# BCELoss
)
def forward(self,x):
out_1,out1=self.d1(x)
out_2,out2=self.d2(out1)
out_3,out3=self.d3(out2)
out_4,out4=self.d4(out3)
out5=self.u1(out4,out_4)
out6=self.u2(out5,out_3)
out7=self.u3(out6,out_2)
out8=self.u4(out7,out_1)
out=self.o(out8)
return out
3.验证
最后写一个简单的训练程序验证一下效果。
使用 V O C 2012 VOC \ 2012 VOC 2012数据集里面的语义分割数据,2913张标注好的图片。训练一个过拟合版本,使用训练数据集中的某一张作为验证数据。
dataset.py:
class SEGData(Dataset):
def __init__(self):
'''
根据标注文件去取图片
'''
self.img_path=IMG_PATH
self.label_path=SEGLABE_PATH
self.label_data=os.listdir(self.label_path)
self.totensor=torchvision.transforms.ToTensor()
self.resizer=torchvision.transforms.Resize((256,256))
def __len__(self):
return len(self.label_data)
def __getitem__(self, item):
'''
由于输出的图片的尺寸不同,我们需要转换为相同大小的图片。首先转换为正方形图片,然后缩放的同样尺度(256*256)。
否则dataloader会报错。
'''
# 取出图片路径
img_name = os.path.join(self.label_path, self.label_data[item])
img_name = os.path.split(img_name)
img_name = img_name[-1]
img_name = img_name.split('.')
img_name = img_name[0] + '.jpg'
img_data = os.path.join(self.img_path, img_name)
label_data = os.path.join(self.label_path, self.label_data[item])
# 将图片和标签都转为正方形
img = Image.open(img_data)
label = Image.open(label_data)
w, h = img.size
# 以最长边为基准,生成全0正方形矩阵
slide = max(h, w)
black_img = torchvision.transforms.ToPILImage()(torch.zeros(3, slide, slide))
black_label = torchvision.transforms.ToPILImage()(torch.zeros(3, slide, slide))
black_img.paste(img, (0, 0, int(w), int(h))) # patse在图中央和在左上角是一样的
black_label.paste(label, (0, 0, int(w), int(h)))
# 变为tensor,转换为统一大小256*256
img = self.resizer(black_img)
label = self.resizer(black_label)
img = self.totensor(img)
label = self.totensor(label)
return img,label
train.py:
net = UNet().cuda()
optimizer = torch.optim.Adam(net.parameters())
loss_func = nn.BCELoss()
data=SEGData()
dataloader = DataLoader(data, batch_size=BATCH_SIZE, shuffle=True,num_workers=0,drop_last=True)
summary=SummaryWriter(r'Log')
EPOCH=1000
print('load net')
net.load_state_dict(torch.load('SAVE/Unet.pt'))
print('load success')
for epoch in range(EPOCH):
print('开始第{}轮'.format(epoch))
net.train()
for i,(img,label) in enumerate(dataloader):
img=img.cuda()
label=label.cuda()
img_out=net(img)
loss=loss_func(img_out,label)
optimizer.zero_grad()
loss.backward()
optimizer.step()
summary.add_scalar('bceloss',loss,i)
torch.save(net.state_dict(),r'SAVE/Unet.pt')
img,label=data[90]
img=torch.unsqueeze(img,dim=0).cuda()
net.eval()
out=net(img)
save_image(out, 'Log_imgs/segimg_ep{}_90th_pic.jpg'.format(epoch,i), nrow=1, scale_each=True)
print('第{}轮结束'.format(epoch))
由于训练了差不多两天,所以输出的图较多,使用前100多轮合成为gif图。可以看出网络对边缘的检测能力是很强的,几乎一开始就能检测出来,后面难的就是对像素进行分类了。
最后对比一下结果。
标签:

结果:
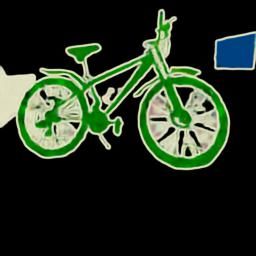
效果还行