自动驾驶系统入门(三) - 毫米波雷达
1、毫米波雷达基础解析
1.1 什么是毫米波雷达
1)工作在毫米波波段(millimeter wave )探测的雷达。工作频段一般为30GHz ~ 300 GHz, 波长 1~10mm,介于微波和厘米波之间,兼具有微波雷达和光电雷达的一些优点;
2)毫米波雷达相比厘米波雷达具有体积小、易集成和空间分辨率高的特点。
3)车载毫米波雷达的工作频率为一般为 24GHz 和77GHz ;
1.2 毫米波雷达的基本结构
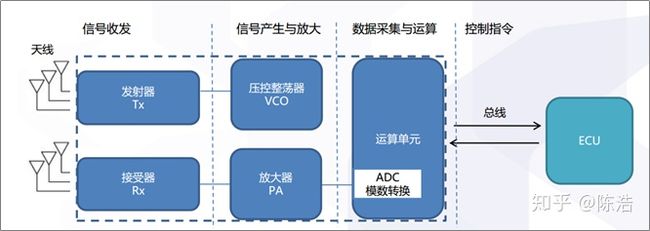
硬件核心:MMIC芯片和天线PCB板,以FMCW车载雷达系统为例,主要包括:天线、收发模块、信号处理模块;
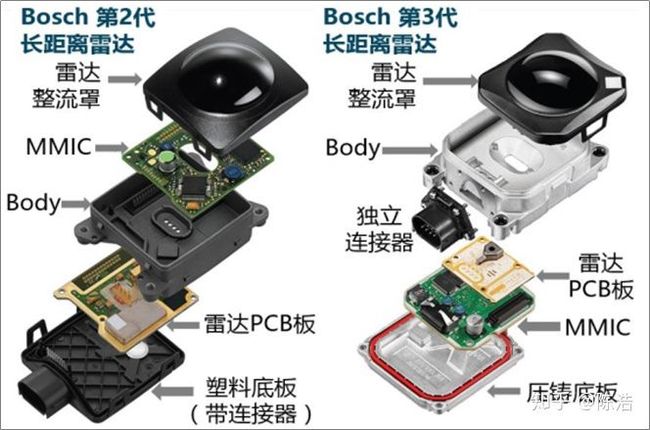
1)前端单片微波集成电路(MMIC) ( 供应商:英飞凌、飞思卡尔 、厦门意行和南京米勒;)它包括多种功能电路,如低噪声放大器(LNA)、功率放大器、混频器、甚至收发系统等功能;
特点:电路损耗小、噪声低、频带宽、动态范围大、功率大、附加效率高、抗电磁辐射能力强等特点;
2)雷达天线高频PCB板:毫米波雷达天线的主流方案是微带阵列,即将高频PCB板集成在普通的PCB基板上实现天线的功能,需要在较小的集成空间中保持天线足够的信号强度。
1.3 毫米波雷达基本工作原理
1)利用高频电路产生特定调制频率(FMCW)的电磁波,并通过天线发送电磁波和接收从目标反射回来的电磁波,通过发送和接收电磁波的参数来计算目标的各个参数。
2)可以同时对多个目标进行测距、测速以及方位测量;测速是根据多普勒效应,而方位测量(包括水平角度和垂直角度)是通过天线的阵列方式来实现的。
1.4 毫米波雷达的工作体制
1)工作体制 :根据辐射电磁波方式不同,毫米波雷达主要有脉冲体制以及连续波体制两种工作体制。其中连续波又可以分为FSK(频移键控)、PSK(相移键控)、CW(恒频连续波)、FMCW(调频连续波)等方式。
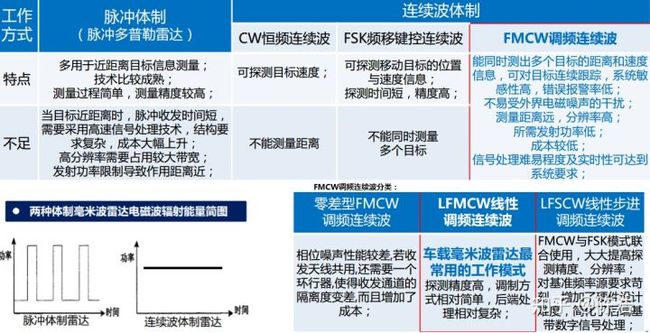
2)FMCW调频连续波雷达的不同调制形式:
a、正弦波调制 b、锯齿式波调制 c、三角波调制
不同调频方式的雷达硬件构成基本相同,只有小部分电路模块、电路参数与信号处理算法有所区别;对于单个静止物体的测量,锯齿波调制方式即可满足;对于运动物体,多采用三角波调制方式;
1.5 毫米波雷达测距、侧速、测方位角原理简介
测距:(TOF)通过给目标连续发送毫米波信号,然后用传感器接收从物体返回的毫米波,通过探测毫米波的飞行(往返)时间来得到目标物距离。
测速:根据多普勒效应,通过计算返回接收天线的雷达波的频率变化就可以得到目标相对于雷达的运动速度,简单地说就是相对速度正比于频率变化量。
测方位角:通过并列的接收天线收到同一目标反射的雷达波的相位差计算得到目标的方位角;
2、 4D毫米波雷达解析
2.1 什么是3D雷达:
1)其信号天线只在二维方向上排布,因此其对目标的探测只有二维水平坐标(x,y),没有高度信息(z);再加上通过多普勒效应探测到的物体速度信息。输出量即为:X / Y/ V
2)目前量产应用的车载毫米波雷达均为3D雷达;
2.2 4D雷达:(供应商:美国傲酷)
1)水平与垂直方向上,都布置了天线,因此能够额外实现对物体高度的探测,谓之4D;输出量:输出X、Y、Z坐标和速度矢量;
2)可以检测不同高度,不同水平面上的运动物体
2.3 4D雷达研发难点及遇到的问题:
1)在有体积要求的毫米波雷达上,垂直与水平方向天线紧密排布会相互产生严重的信号干扰,这需要长期的经验积累开发的算法予以解决;
2)雷达信号接收量大大增加,对模数转换器(ADC)的性能要求将会增加;
3)信号处理算法的可靠性、实时性需要保证,传统的毫米波雷达ECU可能无法胜任大规模点云的处理。
4)数据存储需求将会加大,需要额外添置存储单元。
3、24GHz和77GHz毫米波雷达对比分析
3.1 24GHz频段
1)24.0GHz到24.25GHz的频段是窄带(NB),带宽为250MHz,常用于工业、科学和医学方面。其中,24GHz频带还包括一个带宽为5GHz的超宽带(UWB)。
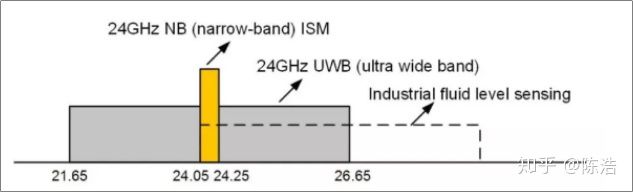
2)在短程雷达中,24GHz频段的NB和UWB雷达已经应用于传统的汽车传感器上。通常NB雷达可以完成盲点检测等简单应用,但在大多数情况下包括超短距离的情况下,由于高频分辨率的需求,需要使用UWB雷达。
3)但是由于欧洲电信标准化协会(ETSI)和联邦通信委员会(FCC)制定的频谱规则和标准,UWB频段将很快被逐步淘汰。2022年1月1日以后,UWB频段将无法在欧洲和美国使用,只有窄带ISM频段可以长期使用。
3.2 77GHz频段
1)其中76-77GHz频段可用于远程车载雷达,并且该频段有等效同性各向辐射功率(EIRP)的优势,可用于前端远程雷达,例如自适应巡航控制。
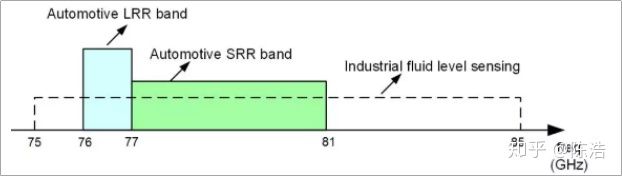
2)77-81GHz短程雷达(SRR)频段是新加入的频段;这个频段最近在全球监管和行业采用情况方面都获得了显著的吸引力。
3)该频段可提供高达4 GHz的宽扫描带宽,非常适合需要高范围分辨率(HRR)的应用。
3.3 车载24GHz与77GHz毫米波雷达性能对比:
1)频率不同,24GHz毫米波雷达的波长大于10cm,严格来讲属于厘米波雷达;
2)相比于24GHz,77GHz同时满足高传输功率和宽工作带宽,同时满足这两点使其可以同时做到长距离探测和高距离分辨率;
3)相比于24GHz,77GHz在物体分辨率、测速和测距精确度具有显著优势;
4)相比于24GHz,77GHz雷达体积更小,其波长不到24GHz的三分之一,所以收发天线面积大幅减小,整个雷达尺寸有效下降;
4、毫米波雷达速度分辨率、距离分辨率、角精度、距离精度解读
4.1 距离分辨率:(用于两个或者两个以上目标)
在雷达图像中,当两个目标位于同一方位角时,但与雷达的距离不同时,二者被雷达区分出来的最小距离则是距离分辨率。雷达的距离分辨率是由脉冲的宽度决定的,也就是说,可以通过减小脉冲宽度以达到期望的距离分辨率,这需要较大的带宽。
4.2 距离精度:(用于描述雷达对单个目标距离参数估计的准确度)
测距精度,它是由回波信号的信噪比SNR决定的。
4.3 角分辨率:(雷达的方位角分辨率一般指水平角分辨率(azimuth resolution))
雷达在角度上区分邻近目标的能力,通常以最小可分辨的角度来度量。雷达的角度分辨率取决于雷达的工作波长λ和天线口径尺寸L,约为λ/(2L)。
例如:方位角分辨率为1.6°的意思就是,当两个物体在空间上需要至少相距1.6°,才能被雷达在水平角度上区分开来。若两个物体相距小于1.6°,那么在角度方向上,两物体会重合;
4.4 角精度:(用于描述雷达对单个目标方位角估计的准确度?)
5、毫米波雷达目标特性解读
5.1 目标探测能力具有独特优势:
a、纵向目标探测距离与速度探测能力强;
b、可实现远距离感知与探测;
c、对于静态和动态目标均能作出高精度测量;
5.2 当前毫米波雷达目标探测劣势:
1)无法成像,无法进行图像颜色识别;
2)对横向目标敏感度低,例如:对横穿车辆检测效果不佳;
3)行人反射波较弱,对行人分辨率不高,探测距离近;
4)对高处物体以及小物体检测效果不佳;
5.3 相比于摄像头和激光雷达,毫米波雷达的优势:
1)全天候、全天时工作特性 - 不论昼夜,不受天气状况限制,即使雨雪天都能正常工作;
2)环境适应性强,不良天气环境下仍能正常工作 - 穿透能力强,雨、雾、灰尘等对毫米波雷达干扰较小;
3)测速,测距能力强;