目标检测Yolov5算法——两猫咪打架视频识别
本文的所有资源都放在作者的Github上了,有需要可以自己下载~
1.环境
需要安装好Pytorch,OpenCV,CUDA,CUDNN,nvidia,Anaconda以及paddle
2.安装labelImg
在终端运行
pip install labelimg
安装成功后,输入
labelImg。注意此处I必须大写!!!不然会显示没有labelimg。

3.下载labelImg(使用自己的数据集)
运行labelImg后,会弹出如下窗口
 此时我们可以对自己的数据集图片进行标注。
此时我们可以对自己的数据集图片进行标注。
在home下新建一个名为VOC2007的文件夹,其中再新建两个文件夹,整个文件夹框架如下
VOC2007
│ JPEGImages
│ Annotations
其中JPEGImages文件夹用于存放需要标注的图片数据集,可以是jpg,png等;Annotations用于存放在labelImg中标注好的数据集,根据不同的格式有不同的后缀,voc下标注得到xml类型的结果。
4.获取数据集
我采用了b站一个两只猫咪打架的视频,下载好后每隔10帧得到一幅图像。这里是使用Python代码完成的
# 导入所有必要的库
import cv2
import os
# 从指定的路径读取视频(这里大家改成自己的video的绝对路径)
cam = cv2.VideoCapture("home\\xilm\\video\\888800093-1-208.mp4")
try :
# 创建名为data的文件夹
if not os.path.exists( 'data' ):
os.makedirs( 'data' )
# 如果未创建,则引发错误
except OSError:
print ( 'Error: Creating directory of data' )
# frame
currentframe = 0
while ( True ):
# reading from frame
ret, frame = cam.read()
if ret:
# 增加计数器,以便显示创建了多少帧
currentframe += 1
if currentframe%10 == 0:
# 如果视频仍然存在,继续创建图像
name = './data/frame' + str (int(currentframe/10)) + '.jpg'
print ( 'Creating...' + name)
# 写入提取的图像
cv2.imwrite(name, frame)
else :
break
# 一旦完成释放所有的空间和窗口
cam.release()
cv2.destroyAllWindows()
运行完毕代码之后,就可以获得624张图像
5.数据集标注
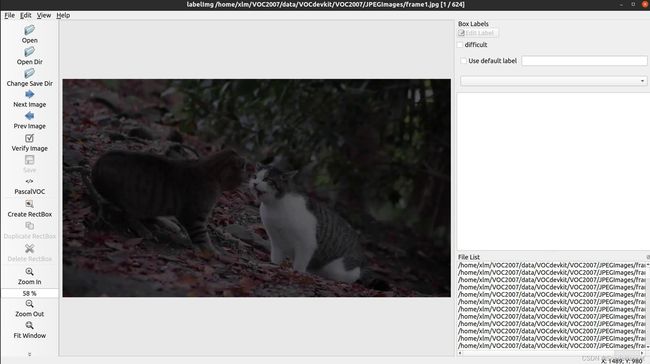
打开labelImg,点击左侧的OpenDir,选择VOC2007\JPEGImages路径,就会在界面上出现图片
 接下来再点击左侧的Change Save Dir,选择
接下来再点击左侧的Change Save Dir,选择VOC2007\Annotations路径。
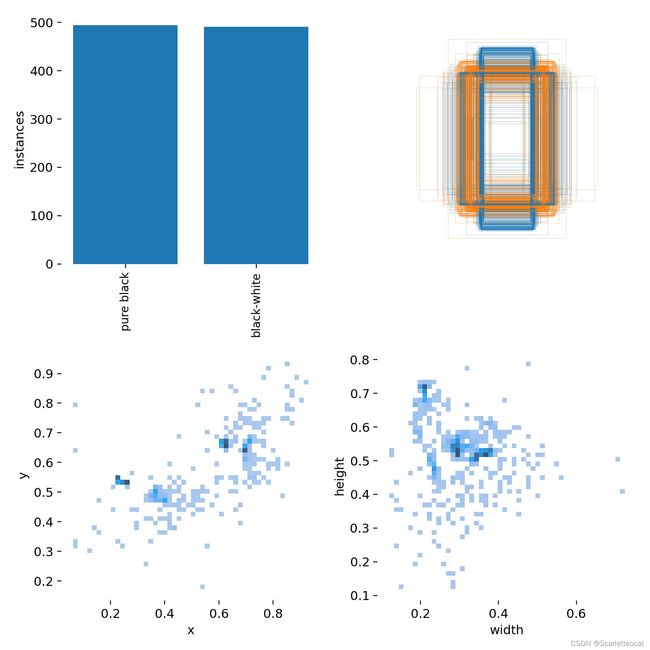
接下来,按下W键,就可以进行画框标注了。我标注了两类['pure black','black-white'],表示两只猫咪。
标注完毕后,按下Ctrl+s就可以保存,此时保存得到xml文件。按D进行下一张图片的标注;按A返回上一张图片。
6.制作train和val集
标注完数据集之后,进行训练集和测试集的制作。
在home下新建一个文件夹,名为data;在data下再新建一个文件夹,名为VOCdevkit,将前面的VOC2007整个文件夹复制到VOCdevkit下。最后的文件夹目录如下:
data
│ VOCdevkit
└───────VOC2007
│ │ Annotations
│ │ JPEGImages
在data文件夹下新建一个python文件,命名为data-classification.py,其内容如下:
import xml.etree.ElementTree as ET
import pickle
import os
from os import listdir, getcwd
from os.path import join
import random
from shutil import copyfile
classes = ['pure black','black-white']
# 分类的名称
TRAIN_RATIO = 80
def clear_hidden_files(path):
dir_list = os.listdir(path)
for i in dir_list:
abspath = os.path.join(os.path.abspath(path), i)
if os.path.isfile(abspath):
if i.startswith("._"):
os.remove(abspath)
else:
clear_hidden_files(abspath)
def convert(size, box):
dw = 1. / size[0]
dh = 1. / size[1]
x = (box[0] + box[1]) / 2.0
y = (box[2] + box[3]) / 2.0
w = box[1] - box[0]
h = box[3] - box[2]
x = x * dw
w = w * dw
y = y * dh
h = h * dh
return (x, y, w, h)
def convert_annotation(image_id):
#in_file = open('VOCdevkit/VOC2007/Annotations/%s.xml' % image_id)
#out_file = open('VOCdevkit/VOC2007/YOLOLabels/%s.txt' % image_id, 'w')
in_file = open('VOCdevkit/VOC2007/Annotations/%s.xml' % image_id,encoding='UTF-8')
out_file = open('VOCdevkit/VOC2007/YOLOLabels/%s.txt' % image_id,'w',encoding='UTF-8')
tree = ET.parse(in_file)
root = tree.getroot()
size = root.find('size')
w = int(size.find('width').text)
h = int(size.find('height').text)
for obj in root.iter('object'):
difficult = obj.find('difficult').text
cls = obj.find('name').text
if cls not in classes or int(difficult) == 1:
continue
cls_id = classes.index(cls)
xmlbox = obj.find('bndbox')
b = (float(xmlbox.find('xmin').text), float(xmlbox.find('xmax').text), float(xmlbox.find('ymin').text),
float(xmlbox.find('ymax').text))
bb = convert((w, h), b)
out_file.write(str(cls_id) + " " + " ".join([str(a) for a in bb]) + '\n')
in_file.close()
out_file.close()
wd = os.getcwd()
wd = os.getcwd()
data_base_dir = os.path.join(wd, "VOCdevkit/")
if not os.path.isdir(data_base_dir):
os.mkdir(data_base_dir)
work_sapce_dir = os.path.join(data_base_dir, "VOC2007/")
if not os.path.isdir(work_sapce_dir):
os.mkdir(work_sapce_dir)
annotation_dir = os.path.join(work_sapce_dir, "Annotations/")
if not os.path.isdir(annotation_dir):
os.mkdir(annotation_dir)
clear_hidden_files(annotation_dir)
image_dir = os.path.join(work_sapce_dir, "JPEGImages/")
if not os.path.isdir(image_dir):
os.mkdir(image_dir)
clear_hidden_files(image_dir)
yolo_labels_dir = os.path.join(work_sapce_dir, "YOLOLabels/")
if not os.path.isdir(yolo_labels_dir):
os.mkdir(yolo_labels_dir)
clear_hidden_files(yolo_labels_dir)
yolov5_images_dir = os.path.join(data_base_dir, "images/")
if not os.path.isdir(yolov5_images_dir):
os.mkdir(yolov5_images_dir)
clear_hidden_files(yolov5_images_dir)
yolov5_labels_dir = os.path.join(data_base_dir, "labels/")
if not os.path.isdir(yolov5_labels_dir):
os.mkdir(yolov5_labels_dir)
clear_hidden_files(yolov5_labels_dir)
yolov5_images_train_dir = os.path.join(yolov5_images_dir, "train/")
if not os.path.isdir(yolov5_images_train_dir):
os.mkdir(yolov5_images_train_dir)
clear_hidden_files(yolov5_images_train_dir)
yolov5_images_test_dir = os.path.join(yolov5_images_dir, "val/")
if not os.path.isdir(yolov5_images_test_dir):
os.mkdir(yolov5_images_test_dir)
clear_hidden_files(yolov5_images_test_dir)
yolov5_labels_train_dir = os.path.join(yolov5_labels_dir, "train/")
if not os.path.isdir(yolov5_labels_train_dir):
os.mkdir(yolov5_labels_train_dir)
clear_hidden_files(yolov5_labels_train_dir)
yolov5_labels_test_dir = os.path.join(yolov5_labels_dir, "val/")
if not os.path.isdir(yolov5_labels_test_dir):
os.mkdir(yolov5_labels_test_dir)
clear_hidden_files(yolov5_labels_test_dir)
train_file = open(os.path.join(wd, "yolov5_train.txt"), 'w')
test_file = open(os.path.join(wd, "yolov5_val.txt"), 'w')
train_file.close()
test_file.close()
train_file = open(os.path.join(wd, "yolov5_train.txt"), 'a')
test_file = open(os.path.join(wd, "yolov5_val.txt"), 'a')
list_imgs = os.listdir(image_dir) # list image files
prob = random.randint(1, 100)
print("Probability: %d" % prob)
for i in range(0, len(list_imgs)):
path = os.path.join(image_dir, list_imgs[i])
if os.path.isfile(path):
image_path = image_dir + list_imgs[i]
voc_path = list_imgs[i]
(nameWithoutExtention, extention) = os.path.splitext(os.path.basename(image_path))
(voc_nameWithoutExtention, voc_extention) = os.path.splitext(os.path.basename(voc_path))
annotation_name = nameWithoutExtention + '.xml'
annotation_path = os.path.join(annotation_dir, annotation_name)
label_name = nameWithoutExtention + '.txt'
label_path = os.path.join(yolo_labels_dir, label_name)
prob = random.randint(1, 100)
print("Probability: %d" % prob)
if (prob < TRAIN_RATIO): # train dataset
if os.path.exists(annotation_path):
train_file.write(image_path + '\n')
convert_annotation(nameWithoutExtention) # convert label
copyfile(image_path, yolov5_images_train_dir + voc_path)
copyfile(label_path, yolov5_labels_train_dir + label_name)
else: # test dataset
if os.path.exists(annotation_path):
test_file.write(image_path + '\n')
convert_annotation(nameWithoutExtention) # convert label
copyfile(image_path, yolov5_images_test_dir + voc_path)
copyfile(label_path, yolov5_labels_test_dir + label_name)
train_file.close()
test_file.close()
这里只需要按需求更改两个位置:
- 第九行:
classes = ['pure black','black-white'],改为标注的类型; - 第十二行:
TRAIN_RATIO = 80,改为训练集个数占总数据集的比例。
如果运行作者的数据集可以不修改此处。
现在点击运行该Python文件,就会得到许多新生成的文件
 首先,新生成了两个文件夹:
首先,新生成了两个文件夹:images和val,里面分别有两个文件夹train和test。不同在于:images里放的是train和val的图片,而labels里放的是yolo可以识别的train和val的txt标注文件。
其次,VOC2007文件夹里也生成了一个文件夹YOLOLabels;
最后,data文件夹下生成了两个txt文件,分别是yolov5_train/val.txt。
7.训练yolov5目标检测模型
-
首先下载yolov5模型,解压后生成一个
yolov5-5.0文件夹。
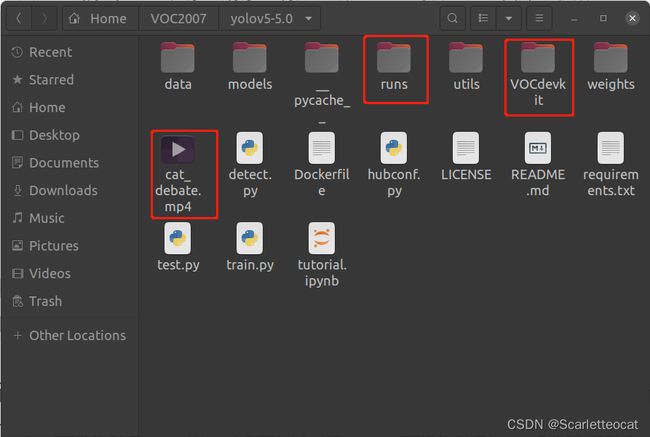 上图中红框标注的三个文件是后来添加的。
上图中红框标注的三个文件是后来添加的。 -
接下来,将刚才data文件夹下的
VOCdevkit文件复制到yolov5-5.0文件夹中,如上图所示。 -
在VScode中打开
yolov5-5.0文件夹,如下
上图中红框标注的两个文件是后来添加的。 -
在上图的
data文件夹下新建一个文件名为three.yaml的文件
其内容如下:
train: VOCdevkit/images/train
val: VOCdevkit/images/val
nc: 2
names: ['pure black','black-white']
这里大家可以根据需要,将nc改为自己的datasets类别个数,names改为标签。
- 在
models文件夹下新建一个文件名为three.yaml的文件
 其内容如下:
其内容如下:
# parameters
nc: 2 # number of classes
depth_multiple: 0.33 # model depth multiple
width_multiple: 0.50 # layer channel multiple
# anchors
anchors:
- [10,13, 16,30, 33,23] # P3/8
- [30,61, 62,45, 59,119] # P4/16
- [116,90, 156,198, 373,326] # P5/32
# YOLOv5 backbone
backbone:
# [from, number, module, args]
[[-1, 1, Focus, [64, 3]], # 0-P1/2
[-1, 1, Conv, [128, 3, 2]], # 1-P2/4
[-1, 3, C3, [128]],
[-1, 1, Conv, [256, 3, 2]], # 3-P3/8
[-1, 9, C3, [256]],
[-1, 1, Conv, [512, 3, 2]], # 5-P4/16
[-1, 9, C3, [512]],
[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32
[-1, 1, SPP, [1024, [5, 9, 13]]],
[-1, 3, C3, [1024, False]], # 9
]
# YOLOv5 head
head:
[[-1, 1, Conv, [512, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 6], 1, Concat, [1]], # cat backbone P4
[-1, 3, C3, [512, False]], # 13
[-1, 1, Conv, [256, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 4], 1, Concat, [1]], # cat backbone P3
[-1, 3, C3, [256, False]], # 17 (P3/8-small)
[-1, 1, Conv, [256, 3, 2]],
[[-1, 14], 1, Concat, [1]], # cat head P4
[-1, 3, C3, [512, False]], # 20 (P4/16-medium)
[-1, 1, Conv, [512, 3, 2]],
[[-1, 10], 1, Concat, [1]], # cat head P5
[-1, 3, C3, [1024, False]], # 23 (P5/32-large)
[[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
]
这里可以根据自己的需要更改第二行nc: 2 ,改为自己的datasets的类别个数。
-
配置yolov5环境
点击yolov5-5.0文件夹下的requirements.txt文件,可以看到第一行为pip install -r requirements.txt,在VSCode的终端下运行这行命令。 -
权重文件
将yolov5s.pt文件放在weight文件夹下,这个文件我放在了github里。
 上图的
上图的best.pt文件是后面生成的,这里不用管。 -
训练模型
打开yolov5-5.0文件夹下的train.py文件
 对该文件的458-460行进行调整,内容改为下图。
对该文件的458-460行进行调整,内容改为下图。
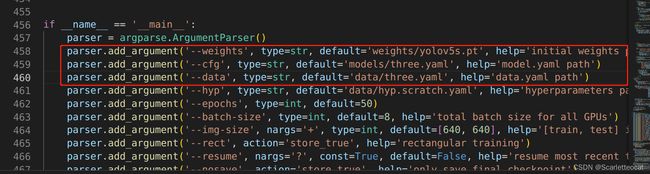 这里主要修改了
这里主要修改了default的内容,也就是这些文件的相对路径在哪里。
462行的default表示了训练次数,我这里选择训练50次。 -
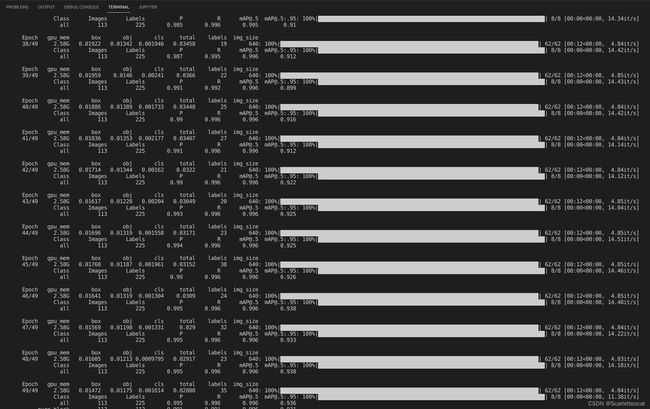
接下来就可以点击运行了。
注意:当提示RuntimeError: cuDNN error: CUDNN_STATUS_NOT_INITIALIZED时,可以通过修改463行的
parser.add_argument('--batch-size', type=int, default=16, help='total batch size for all GPUs')
将default改小一点,我这里改了8,之后就可以正常运行了。
运行如下:
8.测试训练结果(以一个video为例)
-
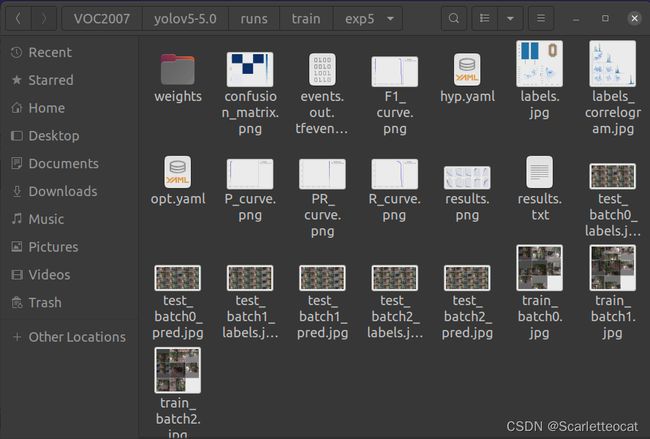
训练结束之后,会在
yolov5-5.0文件夹下生成run文件夹
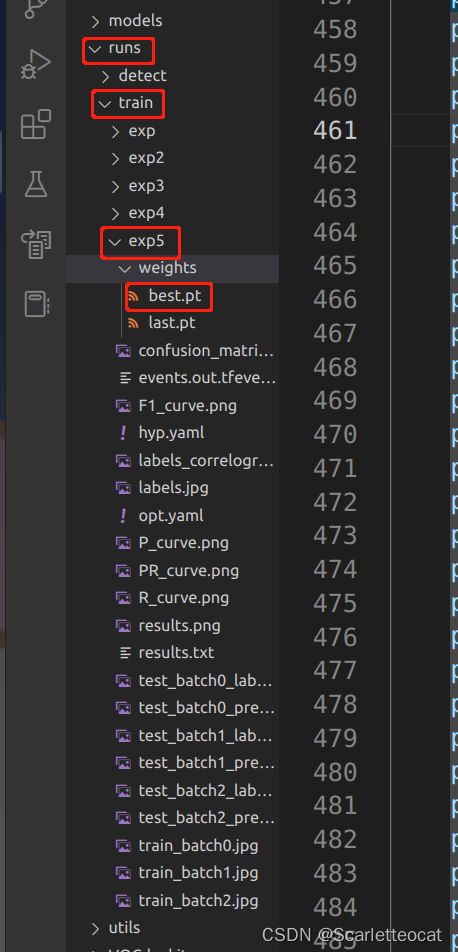 选择最大的
选择最大的exp下的weights文件夹,将best.pt文件复制到yolov5-5.0文件夹下的weights文件夹。
-
接下来,将要检测的video放在
yolov5-5.0文件夹下。
这个视频就是我们取数据集的视频。一开始我们每隔10帧取一张图片,也就意味着这个视频里还有9倍数据集大小的数据供我们验证。这个视频我也放在github了。
-
接下来,选择
yolov5-5.0文件夹下的detect.py文件

对151行和152行进行修改,如图所示。 -
运行
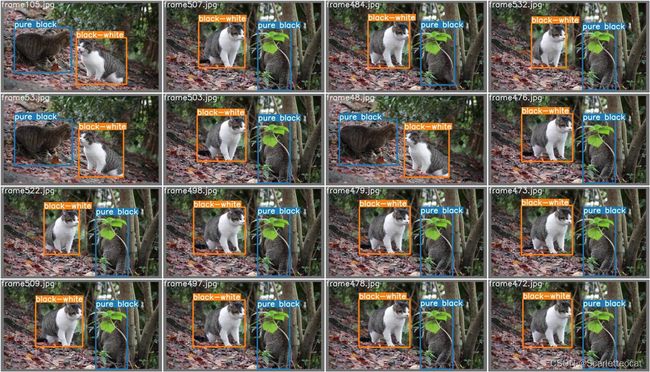
detect.py文件,就会发现,在runs\detect文件夹下生成了检测视频。
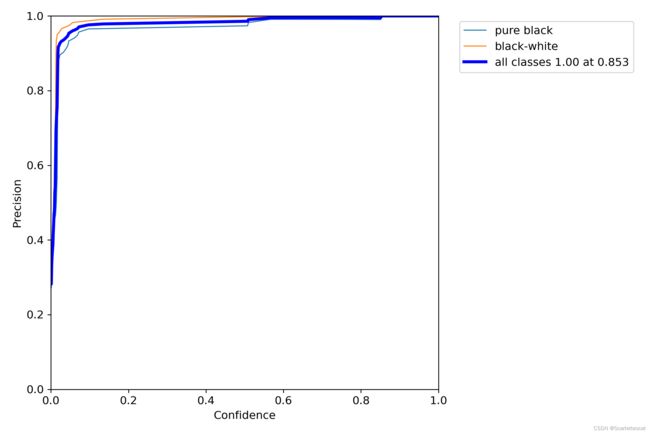
9.最终结果


参考资料:
1.讲的很赞的b站视频
2.RuntimeError: cuDNN error: CUDNN_STATUS_NOT_INITIALIZED
3.使用的b站一个两猫猫吵架视频